CGAL 4.9 - Triangulated Surface Mesh Deformation
Here, I would like to derive the formula (10)

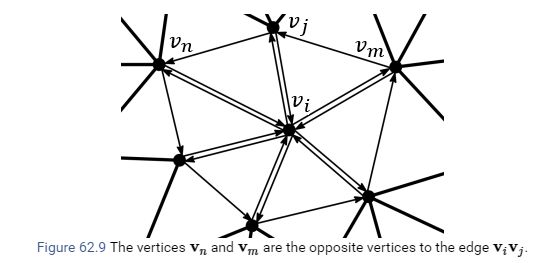

For triangle vjvivm , we have the following three equation which is related to vi
wij∥(v′i−v′j)−Ri(vi−vj)∥2
wij∥(v′i−v′j)−Rj(vi−vj)∥2
wij∥(v′i−v′j)−Rm(vi−vj)∥2
The same as for for triangle vivjvn we have:
wji∥(v′j−v′i)−Ri(vi−vj)∥2
wji∥(v′j−v′i)−Rj(vi−vj)∥2
wji∥(v′j−v′i)−Rn(vi−vj)∥2
Taking derivative of those equations w.r.t vi and sum them up yields formula (10)
Then, let us look into alec jacobson’s matlab code
function K = spokes_and_rims_linear_block(V,F,d)
% Computes a matrix K such that K * R computes
% 鈭� -2*(cot(aij) + cot(bij) * (V(i,d)-V(j,d)) * (Ri + Rj) +
% -2*cot(aij) * (V(i,d)-V(j,d)) * Raij +
% -2*cot(bij) * (V(i,d)-V(j,d)) * Rbij
% j鈭圢(i)
%
% where: vj
% / | \
% / | \
% / | \
% / | \
% aij | bij
% \ | /
% \ | /
% \fij|gij/
% \ | /
% vi
%
% Inputs:
% V #V by dim list of coordinates
% F #F by 3 list of triangle indices into V
% d index into columns of V
% Output:
% K #V by #F matrix
%
if simplex_size == 3
% triangles
C = cotangent(V,F);
i1 = F(:,1); i2 = F(:,2); i3 = F(:,3);
I = [i1;i2;i2;i3;i3;i1;i1;i2;i3];
J = [i2;i1;i3;i2;i1;i3;i1;i2;i3];
v = [ ...
C(:,3).*(V(i1,d)-V(i2,d)) + C(:,2).*(V(i1,d)-V(i3,d)); ...
-C(:,3).*(V(i1,d)-V(i2,d)) + C(:,1).*(V(i2,d)-V(i3,d)); ...
C(:,1).*(V(i2,d)-V(i3,d)) + C(:,3).*(V(i2,d)-V(i1,d)); ...
-C(:,1).*(V(i2,d)-V(i3,d)) + C(:,2).*(V(i3,d)-V(i1,d)); ...
C(:,2).*(V(i3,d)-V(i1,d)) + C(:,1).*(V(i3,d)-V(i2,d)); ...
-C(:,2).*(V(i3,d)-V(i1,d)) + C(:,3).*(V(i1,d)-V(i2,d)); ...
... % diagonal
C(:,3).*(V(i1,d)-V(i2,d)) - C(:,2).*(V(i3,d)-V(i1,d)); ...
C(:,1).*(V(i2,d)-V(i3,d)) - C(:,3).*(V(i1,d)-V(i2,d)); ...
C(:,2).*(V(i3,d)-V(i1,d)) - C(:,1).*(V(i2,d)-V(i3,d)); ...
];
% construct and divide by 3 so laplacian can be used as is
K = sparse(I,J,v,n,n)/3;
elseif simplex_size == 4
% tetrahedra
assert(false)
end
end
The column dimension of matrix k goes through each vertex that edges connect to. Elements on each row of matrix k are the same for linearizing the rotation matrix summation.
For each vertex on each triangle, we sum cot* edge up through edges connected to it.