HAL/JNI简明笔记(一)——HAL基本框架
环境:
android 4.3
HAL(hardware abstract layer)是位于操作系统与硬件之间的接口层,目的在于硬件抽象化。它存在于linux的应用层,它在Android系统中的位置是:向下连接驱动,向上给JNI提供接口。
源码的位置:
msm8x12\hardware\libhardware_legacy 为过去的HAL目录,采用链接库模块概念的旧架构,audio,power,wifi,vibrator,uevent等有使用该架构
X:\D500_android\msm8x12\hardware\libhardware 为当前使用的HAL架构,audio,bluetooth,camera,fb,gps,lights,power,sensor,rtc,nfc等有使用该架构
两种HAL架构示意图如下:
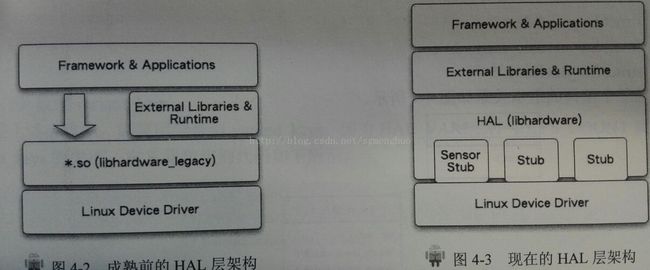
其中左边的HAL架构继承的是老的linux共享库思路,把硬件接口都打包到libhardware_legacy.so,Android的JNI在要调用到这个库的硬件接口函数时,只要将Android.mk中的LOCAL_SHARED_LIBRARIES增加libhardware_legacy就行,这样就会到共享库中获取接口。
缺点:多个进程使用时,会映射到多个进程空间,造成浪费。
右边的HAL架构是当前Android源码中使用的思路,每一个硬件模块称为一个stub(代理人),并且借尸so的形式编译,所有的stub都要通过libhardware.so(由hardware.c)才能找到每一个stub,才能回调每一个stub中硬件抽象接口,当然stub在编写时需要按照HAL_MODULE_INFO_SYM的格式来写,通过libhardware.so找到stub时,就会将该stub加载到内存,返回该stub的模块指针。
优点:采用HAL module和HAL stub结合形式,HAL stub不是共享库,上层只拥有访问stub的函数指针,并不需要stub,Runtime只需要根据module ID并通过HAL module提供的统一接口就能取得stub的操作函数,只会被映射到一个进程,不会浪费空间。
对于libhardware.so/hardware.c而言,我们只需关心它里面几个重要的结构体和一些路径和命名规则即可。
比较重要的结构体代码片如下:
/**
* Every device data structure must begin with hw_device_t
* followed by module specific public methods and attributes.
* 每个设备结构体成员都要以hw_device_t开头,然后再是设备专有其他属性方法
*/
typedef struct hw_device_t {
/** tag must be initialized to HARDWARE_DEVICE_TAG */
uint32_t tag;
uint32_t version;
/** reference to the module this device belongs to */
struct hw_module_t* module;
/** padding reserved for future use */
uint32_t reserved[12];
/** Close this device ,一般是回收device结构体*/
int (*close)(struct hw_device_t* device);
} hw_device_t;
/**
* 每个模块stub结构体变量必须命名为HAL_MODULE_INFO_SYM,数据域成员必须以
* hw_module_t开头,然后再是模块专有属性方法
*/
typedef struct hw_module_t {
/** tag must be initialized to HARDWARE_MODULE_TAG */
uint32_t tag;
uint16_t module_api_version;
#define version_major module_api_version
/**
* Presently, 0 is the only valid value.
* 当前必须赋值为0
*/
uint16_t hal_api_version;
#define version_minor hal_api_version
/** 模块的module ID */
const char *id;
/** Name of this module */
const char *name;
/** Author/owner/implementor of the module */
const char *author;
/** Modules methods */
struct hw_module_methods_t* methods;
/** module's dso */
void* dso;
/** padding to 128 bytes, reserved for future use */
uint32_t reserved[32-7];
} hw_module_t;
typedef struct hw_module_methods_t {
/** Open a specific device ,基本就是malloc设备结构体,并加上回调函数接口*/
int (*open)(const struct hw_module_t* module, const char* id,
struct hw_device_t** device);
} hw_module_methods_t;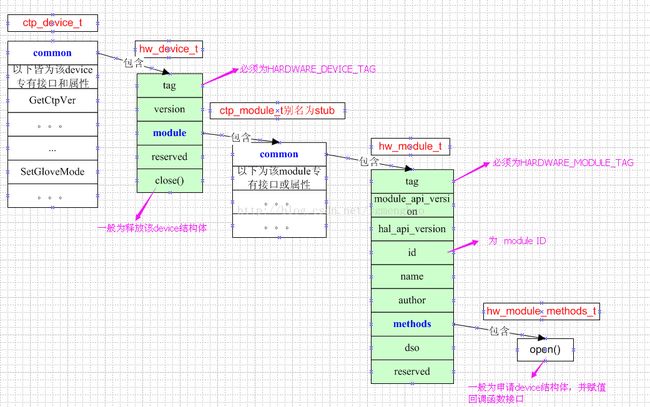
另外libhardware.so搜索stub的路径优先顺序为:先搜索/vendor/lib/hw目录,再搜索/system/lib/hw;
在每个路径下搜索stub的命名优先顺序为(其中name为定义的module ID,后一个参数为属性值):
若以上都未搜索到stub,那么就搜索/system/lib/hw/
新框架总的思路:

具体来说:android frameworks中JNI调用/hardware/libhardware/hardware.c中定义的hw_get_module函数来获取硬件模块,然后调用硬件模块中的方法,硬件模块中的方法直接调用内核接口完成相关功能。
其中每一个module/stub的定义时都叫做HAL_MODULE_INFO_SYM,那么当系统中存在两个或者更多个使用了相同HAL Module Name的so的时候,不就混乱了么?
带着这个疑问查看 Android 源码,会发现 Android 中实现调用 HAL 是通过 hw_get_module 实现的。
int hw_get_module(const char *id, const struct hw_module_t **module);
这是其函数原型, id 会指定 Hardware 的 id ,这是一个字符串,比如 sensor 的 id 是
#define SENSORS_HARDWARE_MODULE_ID "sensors" ,如果找到了对应的 hw_module_t 结构体,会将其指针放入 *module 中。看看它的实现。。。。
| /* Loop through the configuration variants looking for a module */ for (i=0 ; i if (i < HAL_VARIANT_KEYS_COUNT) { // 获取 ro.hardware/ro.product.board/ro.board.platform/ro.arch 等 key 的值。 if (property_get(variant_keys[i], prop, NULL) == 0) { continue; } snprintf(path, sizeof(path), "%s/%s.%s.so", HAL_LIBRARY_PATH, id, prop); // 如果开发板叫做 mmdroid, 那么这里的 path 就是system/lib/hw/sensor.mmdroid.so } else { snprintf(path, sizeof(path), "%s/%s.default.so", HAL_LIBRARY_PATH, id);// 默认会加载 /system/lib/hw/sensor.default.so } if (access(path, R_OK)) { continue; } /* we found a library matching this id/variant */ break; } |
| status = -ENOENT; if (i < HAL_VARIANT_KEYS_COUNT+1) { /* load the module, if this fails, we're doomed, and we should not try * to load a different variant. */ status = load(id, path, module);// 调用 load 函数打开动态链接库 } |
|
|
|
|
获取了动态链接库的路径之后,就会调用 load 函数打开它,下面会打开它。
奥秘在 load 中
| static int load(const char *id, const char *path, const struct hw_module_t **pHmi) { int status; void *handle; struct hw_module_t *hmi;
/* * load the symbols resolving undefined symbols before * dlopen returns. Since RTLD_GLOBAL is not or'd in with * RTLD_NOW the external symbols will not be global */ handle = dlopen(path, RTLD_NOW);// 打开动态库 if (handle == NULL) { char const *err_str = dlerror(); LOGE("load: module=%s/n%s", path, err_str?err_str:"unknown"); status = -EINVAL; goto done; }
/* Get the address of the struct hal_module_info. */ const char *sym = HAL_MODULE_INFO_SYM_AS_STR;// 被定义为了“ HMI ” hmi = (struct hw_module_t *)dlsym(handle, sym);// 查找“ HMI ”这个导出符号,并获取其地址 if (hmi == NULL) { LOGE("load: couldn't find symbol %s", sym); status = -EINVAL; goto done; }
/* Check that the id matches */ // 找到了 hw_module_t 结构!!! if (strcmp(id, hmi->id) != 0) { LOGE("load: id=%s != hmi->id=%s", id, hmi->id); status = -EINVAL; goto done; }
hmi->dso = handle;
/* success */ status = 0;
done: if (status != 0) { hmi = NULL; if (handle != NULL) { dlclose(handle); handle = NULL; } } else { LOGV("loaded HAL id=%s path=%s hmi=%p handle=%p", id, path, *pHmi, handle); } // 凯旋而归 *pHmi = hmi;
return status; } |
从上面的代码中,会发现一个很奇怪的宏 HAL_MODULE_INFO_SYM_AS_STR ,它直接被定义为了 #define HAL_MODULE_INFO_SYM_AS_STR "HMI" ,为何根据它就能从动态链接库中找到这个 hw_module_t 结构体呢?我们查看一下我们用到的 hal 对应的 so 就可以了,在 linux 中可以使用 readelf XX.so –s 查看。
| Symbol table '.dynsym' contains 28 entries: Num: Value Size Type Bind Vis Ndx Name 0: 00000000 0 NOTYPE LOCAL DEFAULT UND 1: 00000594 0 SECTION LOCAL DEFAULT 7 2: 00001104 0 SECTION LOCAL DEFAULT 13 3: 00000000 0 FUNC GLOBAL DEFAULT UND ioctl 4: 00000000 0 FUNC GLOBAL DEFAULT UND strerror 5: 00000b84 0 NOTYPE GLOBAL DEFAULT ABS __exidx_end 6: 00000000 0 OBJECT GLOBAL DEFAULT UND __stack_chk_guard 7: 00000000 0 FUNC GLOBAL DEFAULT UND __aeabi_unwind_cpp_pr0 8: 00000000 0 FUNC GLOBAL DEFAULT UND __errno 9: 00001188 0 NOTYPE GLOBAL DEFAULT ABS _bss_end__ 10: 00000000 0 FUNC GLOBAL DEFAULT UND malloc 11: 00001188 0 NOTYPE GLOBAL DEFAULT ABS __bss_start__ 12: 00000000 0 FUNC GLOBAL DEFAULT UND __android_log_print 13: 00000b3a 0 NOTYPE GLOBAL DEFAULT ABS __exidx_start 14: 00000000 0 FUNC GLOBAL DEFAULT UND __stack_chk_fail 15: 00001188 0 NOTYPE GLOBAL DEFAULT ABS __bss_end__ 16: 00001188 0 NOTYPE GLOBAL DEFAULT ABS __bss_start 17: 00000000 0 FUNC GLOBAL DEFAULT UND memset 18: 00000000 0 FUNC GLOBAL DEFAULT UND __aeabi_uidiv 19: 00001188 0 NOTYPE GLOBAL DEFAULT ABS __end__ 20: 00001188 0 NOTYPE GLOBAL DEFAULT ABS _edata 21: 00001188 0 NOTYPE GLOBAL DEFAULT ABS _end 22: 00000000 0 FUNC GLOBAL DEFAULT UND open 23: 00080000 0 NOTYPE GLOBAL DEFAULT ABS _stack 24: 00001104 128 OBJECT GLOBAL DEFAULT 13 HMI 25: 00001104 0 NOTYPE GLOBAL DEFAULT 13 __data_start 26: 00000000 0 FUNC GLOBAL DEFAULT UND close 27: 00000000 0 FUNC GLOBAL DEFAULT UND free |
从上面中,第 24 个符号,名字就是“ HMI ”,对应于 hw_module_t 结构体。再去对照一下 HAL 的代码。
| /* * The COPYBIT Module */ struct copybit_module_t HAL_MODULE_INFO_SYM = { common: { tag: HARDWARE_MODULE_TAG, version_major: 1, version_minor: 0, id: COPYBIT_HARDWARE_MODULE_ID, name: "QCT MSM7K COPYBIT Module", author: "Google, Inc.", methods: ©bit_module_methods } }; |
这里定义了一个名为 HAL_MODULE_INFO_SYM 的 copybit_module_t 的结构体, common 成员为hw_module_t 类型。注意这里的 HAL_MODULE_INFO_SYM 变量必须为这个名字,这样编译器才会将这个结构体的导出符号变为“ HMI ”,这样这个结构体才能被 dlsym 函数找到!
综上,我们知道了 andriod HAL 模块也有一个通用的入口地址,这个入口地址就是 HAL_MODULE_INFO_SYM变量,通过它,我们可以访问到 HAL 模块中的所有想要外部访问到的方法。
ref:Jerry_xianrui Android HAL(硬件抽象层)介绍以及调用