无人机方向控制pitch yaw roll是什么 .。欧拉角定义
http://blog.csdn.net/yuzhongchun/article/details/22749521
三维空间的右手笛卡尔坐标如图1所示。

图1
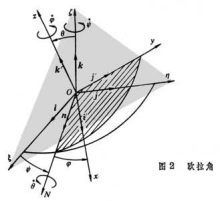
在航空中,pitch, yaw, roll如图2所示。
pitch是围绕X轴旋转,也叫做俯仰角,如图3所示。
yaw是围绕Y轴旋转,也叫偏航角,如图4所示。
roll是围绕Z轴旋转,也叫翻滚角,如图5所示。

图2
图3
图4
图5
欧拉角编辑
解释编辑
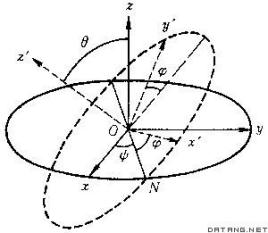
 欧拉角
欧拉角
2定义编辑
静态定义

动态定义
原理编辑
欧拉运动学方程
作用
应用编辑
应用研究
欧拉角的哈尔测度
 欧拉角
欧拉角
四元数编辑
四元数是最简单的超复数。复数是由实数加上元素 i 组成,其中i^2 = -1。 相似地,四元数都是由实数加上三个元素 i、j、k 组成,而且它们有如下的关系: i^2 = j^2 = k^2 = -1 , 每个四元数都是 1、i、j 和 k 的线性组合,即是四元数一般可表示为a + bi + cj + dk,其中a、b、c 、d是实数。
中文名
 威廉·卢云·哈密顿
威廉·卢云·哈密顿
2基本性质编辑
3例子编辑
4群旋转编辑
5矩阵表示编辑

6历史编辑
7用途争辩编辑
8运算编辑
综述
四元数加法:p + q
四元数乘法:pq
四元数点积: p · q
四元数外积:Outer(p,q)
四元数偶积:Even(p,q)
叉积:p × q
四元数转置:p−1
四元数除法:p−1q
四元数纯量部:Scalar(p)
四元数向量部:Vector(p)
四元数模:|p|
四元数符号数:sgn(p)
四元数辐角:arg(p)
四元数和旋转矩阵
Quaternion(四元数)
Quaternion 的定义
四元数一般定义如下:
q=w+xi+yj+zk
其中 w,x,y,z是实数。同时,有:
i*i=-1
j*j=-1
k*k=-1
四元数也可以表示为:
q=[w,v]
其中v=(x,y,z)是矢量,w是标量,虽然v是矢量,但不能简单的理解为3D空间的矢量,它是4维空间中的的矢量,也是非常不容易想像的。
通俗的讲,一个四元数(Quaternion)描述了一个旋转轴和一个旋转角度。这个旋转轴和这个角度可以通过 Quaternion::ToAngleAxis转换得到。当然也可以随意指定一个角度一个旋转轴来构造一个Quaternion。这个角度是相对于单位四元数而言的,也可以说是相对于物体的初始方向而言的。
当用一个四元数乘以一个向量时,实际上就是让该向量围绕着这个四元数所描述的旋转轴,转动这个四元数所描述的角度而得到的向量。
四元组的优点
有多种方式可表示旋转,如 axis/angle、欧拉角(Euler angles)、矩阵(matrix)、四元组等。 相对于其它方法,四元组有其本身的优点:
四元数不会有欧拉角存在的 gimbal lock 问题
四元数由4个数组成,旋转矩阵需要9个数
两个四元数之间更容易插值
四元数、矩阵在多次运算后会积攒误差,需要分别对其做规范化(normalize)和正交化(orthogonalize),对四元数规范化更容易
与旋转矩阵类似,两个四元组相乘可表示两次旋转
Quaternion 的基本运算
Normalizing a quaternion
// normalising a quaternion works similar to a vector. This method will not do anything
// if the quaternion is close enough to being unit-length. define TOLERANCE as something
// small like 0.00001f to get accurate results
void Quaternion::normalise()
{
// Don't normalize if we don't have to
float mag2 = w * w + x * x + y * y + z * z;
if ( mag2!=0.f && (fabs(mag2 - 1.0f) > TOLERANCE)) {
float mag = sqrt(mag2);
w /= mag;
x /= mag;
y /= mag;
z /= mag;
}
}
The complex conjugate of a quaternion
// We need to get the inverse of a quaternion to properly apply a quaternion-rotation to a vector
// The conjugate of a quaternion is the same as the inverse, as long as the quaternion is unit-length
Quaternion Quaternion::getConjugate()
{
return Quaternion(-x, -y, -z, w);
}
Multiplying quaternions
// Multiplying q1 with q2 applies the rotation q2 to q1
Quaternion Quaternion::operator* (const Quaternion &rq) const
{
// the constructor takes its arguments as (x, y, z, w)
return Quaternion(w * rq.x + x * rq.w + y * rq.z - z * rq.y,
w * rq.y + y * rq.w + z * rq.x - x * rq.z,
w * rq.z + z * rq.w + x * rq.y - y * rq.x,
w * rq.w - x * rq.x - y * rq.y - z * rq.z);
}
Rotating vectors
// Multiplying a quaternion q with a vector v applies the q-rotation to v
Vector3 Quaternion::operator* (const Vector3 &vec) const
{
Vector3 vn(vec);
vn.normalise();
Quaternion vecQuat, resQuat;
vecQuat.x = vn.x;
vecQuat.y = vn.y;
vecQuat.z = vn.z;
vecQuat.w = 0.0f;
resQuat = vecQuat * getConjugate();
resQuat = *this * resQuat;
return (Vector3(resQuat.x, resQuat.y, resQuat.z));
}
How to convert to/from quaternions1
Quaternion from axis-angle
// Convert from Axis Angle
void Quaternion::FromAxis(const Vector3 &v, float angle)
{
float sinAngle;
angle *= 0.5f;
Vector3 vn(v);
vn.normalise();
sinAngle = sin(angle);
x = (vn.x * sinAngle);
y = (vn.y * sinAngle);
z = (vn.z * sinAngle);
w = cos(angle);
}
Quaternion from Euler angles
// Convert from Euler Angles
void Quaternion::FromEuler(float pitch, float yaw, float roll)
{
// Basically we create 3 Quaternions, one for pitch, one for yaw, one for roll
// and multiply those together.
// the calculation below does the same, just shorter
float p = pitch * PIOVER180 / 2.0;
float y = yaw * PIOVER180 / 2.0;
float r = roll * PIOVER180 / 2.0;
float sinp = sin(p);
float siny = sin(y);
float sinr = sin(r);
float cosp = cos(p);
float cosy = cos(y);
float cosr = cos(r);
this->x = sinr * cosp * cosy - cosr * sinp * siny;
this->y = cosr * sinp * cosy + sinr * cosp * siny;
this->z = cosr * cosp * siny - sinr * sinp * cosy;
this->w = cosr * cosp * cosy + sinr * sinp * siny;
normalise();
}
Quaternion to Matrix
// Convert to Matrix
Matrix4 Quaternion::getMatrix() const
{
float x2 = x * x;
float y2 = y * y;
float z2 = z * z;
float xy = x * y;
float xz = x * z;
float yz = y * z;
float wx = w * x;
float wy = w * y;
float wz = w * z;
// This calculation would be a lot more complicated for non-unit length quaternions
// Note: The constructor of Matrix4 expects the Matrix in column-major format like expected by
// OpenGL
return Matrix4( 1.0f - 2.0f * (y2 + z2), 2.0f * (xy - wz), 2.0f * (xz + wy), 0.0f,
2.0f * (xy + wz), 1.0f - 2.0f * (x2 + z2), 2.0f * (yz - wx), 0.0f,
2.0f * (xz - wy), 2.0f * (yz + wx), 1.0f - 2.0f * (x2 + y2), 0.0f,
0.0f, 0.0f, 0.0f, 1.0f)
}
Quaternion to axis-angle
// Convert to Axis/Angles
void Quaternion::getAxisAngle(Vector3 *axis, float *angle)
{
float scale = sqrt(x * x + y * y + z * z);
axis->x = x / scale;
axis->y = y / scale;
axis->z = z / scale;
*angle = acos(w) * 2.0f;
}
Quaternion 插值
线性插值
最简单的插值算法就是线性插值,公式如:
q(t)=(1-t)q1 + t q2
但这个结果是需要规格化的,否则q(t)的单位长度会发生变化,所以
q(t)=(1-t)q1+t q2 / || (1-t)q1+t q2 ||
球形线性插值
尽管线性插值很有效,但不能以恒定的速率描述q1到q2之间的曲线,这也是其弊端,我们需要找到一种插值方法使得q1->q(t)之间的夹角θ是线性的,即θ(t)=(1-t)θ1+t*θ2,这样我们得到了球形线性插值函数q(t),如下:
q(t)=q1 * sinθ(1-t)/sinθ + q2 * sinθt/sineθ
如果使用D3D,可以直接使用 D3DXQuaternionSlerp 函数就可以完成这个插值过程。
用 Quaternion 实现 Camera 旋转
总体来讲,Camera 的操作可分为如下几类:
沿直线移动
围绕某轴自转
围绕某轴公转
下面是一个使用了 Quaternion 的 Camera 类:
class Camera {
private:
Quaternion m_orientation;
public:
void rotate (const Quaternion& q);
void rotate(const Vector3& axis, const Radian& angle);
void roll (const GLfloat angle);
void yaw (const GLfloat angle);
void pitch (const GLfloat angle);
};
void Camera::rotate(const Quaternion& q)
{
// Note the order of the mult, i.e. q comes after
m_Orientation = q * m_Orientation;
}
void Camera::rotate(const Vector3& axis, const Radian& angle)
{
Quaternion q;
q.FromAngleAxis(angle,axis);
rotate(q);
}
void Camera::roll (const GLfloat angle) //in radian
{
Vector3 zAxis = m_Orientation * Vector3::UNIT_Z;
rotate(zAxis, angleInRadian);
}
void Camera::yaw (const GLfloat angle) //in degree
{
Vector3 yAxis;
{
// Rotate around local Y axis
yAxis = m_Orientation * Vector3::UNIT_Y;
}
rotate(yAxis, angleInRadian);
}
void Camera::pitch (const GLfloat angle) //in radian
{
Vector3 xAxis = m_Orientation * Vector3::UNIT_X;
rotate(xAxis, angleInRadian);
}
void Camera::gluLookAt() {
GLfloat m[4][4];
identf(&m[0][0]);
m_Orientation.createMatrix (&m[0][0]);
glMultMatrixf(&m[0][0]);
glTranslatef(-m_eyex, -m_eyey, -m_eyez);
}
用 Quaternion 实现 trackball
用鼠标拖动物体在三维空间里旋转,一般设计一个 trackball,其内部实现也常用四元数。
class TrackBall
{
public:
TrackBall();
void push(const QPointF& p);
void move(const QPointF& p);
void release(const QPointF& p);
QQuaternion rotation() const;
private:
QQuaternion m_rotation;
QVector3D m_axis;
float m_angularVelocity;
QPointF m_lastPos;
};
void TrackBall::move(const QPointF& p)
{
if (!m_pressed)
return;
QVector3D lastPos3D = QVector3D(m_lastPos.x(), m_lastPos.y(), 0.0f);
float sqrZ = 1 - QVector3D::dotProduct(lastPos3D, lastPos3D);
if (sqrZ > 0)
lastPos3D.setZ(sqrt(sqrZ));
else
lastPos3D.normalize();
QVector3D currentPos3D = QVector3D(p.x(), p.y(), 0.0f);
sqrZ = 1 - QVector3D::dotProduct(currentPos3D, currentPos3D);
if (sqrZ > 0)
currentPos3D.setZ(sqrt(sqrZ));
else
currentPos3D.normalize();
m_axis = QVector3D::crossProduct(lastPos3D, currentPos3D);
float angle = 180 / PI * asin(sqrt(QVector3D::dotProduct(m_axis, m_axis)));
m_axis.normalize();
m_rotation = QQuaternion::fromAxisAndAngle(m_axis, angle) * m_rotation;
m_lastPos = p;
}
---------------------------------------------------------------------------------------------------------
每一个单位四元数都可以对应到一个旋转矩阵
单位四元数q=(s,V)的共轭为q*=(s,-V)
单位四元数的模为||q||=1;
四元数q=(s,V)的逆q^(-1)=q*/(||q||)=q*
一个向量r,沿着向量n旋转a角度之后的向量是哪个(假设为v),这个用四元数可以轻松搞定
构造两个四元数q=(cos(a/2),sin(a/2)*n),p=(0,r)
p`=q * p * q^(-1) 这个可以保证求出来的p`也是(0,r`)形式的,求出的r`就是r旋转后的向量
另外其实对p做q * p * q^(-1)操作就是相当于对p乘了一个旋转矩阵,这里先假设 q=(cos(a/2),sin(a/2)*n)=(s,(x, y, z))
两个四元数相乘也表示一个旋转
Q1 * Q2 表示先以Q2旋转,再以Q1旋转
则这个矩阵为
同理一个旋转矩阵也可以转换为一个四元数,即给你一个旋转矩阵可以求出(s,x,y,z)这个四元数,
方法是: