- 基于均值偏移算法的动态目标跟踪研究
Zoiny_楠
算法均值算法目标跟踪
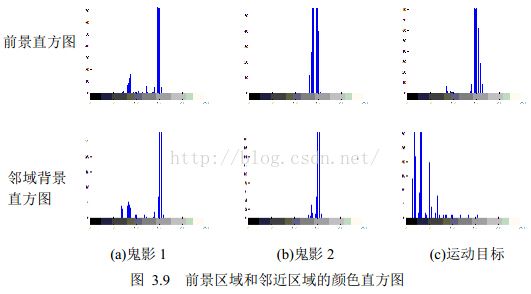
摘要:目标跟踪技术是计算机视觉领域中重要研究课题之一,在人类生活、军事侦察、工业生产、医疗诊断、交通管理等多方面,都有广泛的应用,研究目标跟踪对人类生活、工程应用等具有现实的指导意义。在基于视觉的目标跟踪算法中,经典的Mean-Shift算法以其理论科学有效、操作简单易实现,跟踪性能较好等优势,一直是众多学者研究的热点。可算法也存在着许多缺陷。例如目标模型中混有背景信息的干扰,给目标定位带来了偏差
- UC3842控制器在flyback反激电源设计与仿真中的应用
Jacob Piao
本文还有配套的精品资源,点击获取简介:UC3842作为电流模式控制的集成控制器,在设计反激式转换器中有着广泛应用。本文档提供了使用UC3842进行flyback反激电源电路设计的详细案例,并通过Multisim14进行仿真。包含了电路设计的源文件、仿真参数设置及UC3842芯片的详细资料,旨在为工程师提供从理论到实践的完整学习平台。1.UC3842控制器特点与应用1.1UC3842控制器简介UC3
- 基于MATLAB的资源优化与工期固定-资源均衡分析方法研究【附代码】
拉勾科研工作室
matlab开发语言
算法与建模领域的探索者|专注数据分析与智能模型设计✨擅长算法、建模、数据分析matlab、python、仿真✅具体问题可以私信或查看文章底部二维码✅感恩科研路上每一位志同道合的伙伴!(1)资源均衡优化相关理论与问题分类在现代工程项目中,资源的合理分配和使用是确保项目按时完成、成本可控的关键因素。资源均衡优化作为项目管理中的核心环节,旨在通过调整资源的使用方案,使资源消耗在整个工期内尽可能平稳,避免
- 手机屏像素缺陷修复及相关液晶线路激光修复原理
syncon12
科技制造3d
摘要手机屏像素缺陷严重影响显示效果,而液晶线路异常是导致像素缺陷的关键因素之一。激光修复技术凭借高精度与非接触特性,能够有效修复液晶线路,进而改善像素显示。本文分析手机屏像素缺陷类型,探究液晶线路激光修复原理、工艺及参数优化,为提升手机屏显示质量提供理论支撑。引言随着手机屏向高分辨率、高刷新率方向发展,像素密度不断提升,像素缺陷问题愈发凸显。液晶线路作为控制像素显示的核心结构,其断路、短路、信号传
- ZYNQ无DMA的四路HP总线极限性能探索
芯作者
D1:ZYNQ设计fpga开发硬件工程智能硬件
深入挖掘AXIHP总线的直接传输潜力,突破传统DMA的性能瓶颈一、HP总线:ZYNQ系统的"高速公路"在XilinxZYNQ架构中,HP(HighPerformance)总线是连接PS(处理器系统)和PL(可编程逻辑)的关键通道。传统方案依赖DMA控制器进行数据传输,但当我们需要超低延迟或确定性响应时,无DMA的直接CPU控制成为更优选择。本文将揭示如何通过四路HP总线实现惊人的24GB/s理论带
- 基于灰色马尔科夫模型预测人口数量,是一种结合灰色系统理论(处理少数据、不确定性)与马尔科夫链(描述随机波动)的融合预测方法
利用灰色模型捕捉人口变化的总体趋势,再通过马尔科夫链修正因随机因素导致的预测偏差,从而提高预测精度。一、模型理论基础灰色系统理论原理(核心:处理少数据、部分信息未知的系统)差异信息原理:系统内外的差异是信息源,人口数据的时间序列差异蕴含变化规律。解的非唯一性原理:信息不完全时,预测结果存在多个可能区间(与马尔科夫状态划分契合)。最小信息原理:仅需少量历史数据(通常≥4个)即可建模,适合人口统计资料
- 误差的回响:反向传播算法与神经网络的惊天逆转
田园Coder
人工智能科普人工智能科普
当专家系统在20世纪80年代初期大放异彩,成为人工智能实用化的耀眼明星时,另一股曾经被宣判“死刑”的力量——连接主义(神经网络)——正在寒冬的冻土下悄然涌动,孕育着一场惊天动地的复苏。马文·明斯基和西摩·帕尔特在1969年《感知机》专著中那精准而冷酷的理论批判,如同沉重的封印,将多层神经网络的研究禁锢了近二十年。他们指出的核心死结——缺乏有效算法来训练具有隐藏层的网络——仿佛一道无法逾越的天堑。单
- 支持java8的kafka版本
兮动人
kafka分布式支持java8的kafka版本
文章目录1.Kafka支持Java8的版本范围2.官方建议与兼容性3.版本迁移建议4.关键时间点5.注意事项6.总结1.Kafka支持Java8的版本范围Kafka2.x和3.x版本:Kafka2.x和3.x版本(如2.8.0、3.0.0等)理论上支持Java8,但官方已逐步弃用对Java8的支持。Kafka3.0:官方在3.0版本中弃用Java8(但仍允许使用),并强烈建议升级到Java11或更
- 2024年BCSP-X小高组基础知识题目(模拟题)
天秀信奥编程培训
#BCXP-X模拟题北京BCSP-X试题讲解专栏BCSP-Xc++算法数据结构
一、单项选择计算机的核心部件是什么()?A.显示器B.键盘C.中央处理器(CPU)D.鼠标将十进制小数9.375转换为二进制小数,其正确的二进制表示是()。A.1001.11B.1011.11C.1001.011D.1011.011假设有一个内存显示为96MB的文件夹,里面存储的都是分辨率为1024×2048的24位图像,请问理论上存储了()张图像?(不考虑图像技术压缩对内存的优化)A.16张B.
- Maven 多模块项目调试与问题排查总结
博主简介:CSDN博客专家,历代文学网(PC端可以访问:https://literature.sinhy.com/#/?__c=1000,移动端可微信小程序搜索“历代文学”)总架构师,15年工作经验,精通Java编程,高并发设计,Springboot和微服务,熟悉Linux,ESXI虚拟化以及云原生Docker和K8s,热衷于探索科技的边界,并将理论知识转化为实际应用。保持对新技术的好奇心,乐于分
- 21个MySQL索引优化实战技巧
MySQL索引优化是提升数据库性能的关键手段,一个合理的索引设计和使用策略,往往能将查询速度提升几十倍甚至上百倍。然而,索引优化并不简单,既需要扎实的理论基础,也需要丰富的实战经验。本文总结了21个MySQL索引优化的实战技巧,从索引选择、设计到维护、监控的全生命周期,帮助你解决日常开发中的索引性能问题。基础知识回顾在具体介绍前,让我们先简单回顾索引的基础知识:MySQL常用的索引类型包括:主键索
- 蔡高厅老师 - 高等数学-阅读笔记 - 01 - 前言、函数【视频第01、02、03、】
Franklin
数学线性代数
高等数学前言;196学时,每周6课主要内容:上册一元、多元函数数,微分学、积分学、矢量代数、空间解析几何无穷级数、微分方程,多元函数微分学和积分学目的:高等数学3基:1高等数学的基本知识2高度数学的基本理论3高等数学的基本计算方法提高数学素养培养:抽象思维、逻辑推理、辩证的思想方法、空间想象能力、分析问题、解决问题的能力为进一步学习打下必要的学习基础和初等数学不同,研究的不是常量而是变量,变量和变
- 212springboot基于javaweb的城乡居民基本医疗信息管理系统医院(源码+文档+运行视频+讲解视频)
QQ2279239102
vuejavamavenSpringboothtml
项目技术:springboot+Maven+Vue等等组成,B/S模式+Maven管理等等。环境需要1.运行环境:最好是javajdk1.8,我们在这个平台上运行的。其他版本理论上也可以。2.IDE环境:IDEA,Eclipse,Myeclipse都可以。推荐IDEA;3.tomcat环境:Tomcat7.x,8.x,9.x版本均可4.硬件环境:windows7/8/101G内存以上;或者MacO
- RNN笔记
sjtu_哈基坤
LLM随笔rnn笔记人工智能
来源见此处概述RNN(RecurrentNeuralNetwork)RNN之所以称为循环神经网络,是因为一个序列的当前的输出与前面的输出也有关.具体表现是网络会对前面的信息进行记忆并且应用于当前输出的计算中.即隐藏层之间的节点也是有连接的.并且隐藏层的输入不仅包括输入层的输出还包括上一时刻隐藏层的输出.理论上RNN能对任何长度的序列进行处理,但是在实践中,为了降低复杂性,往往假设当前状态只与前面几
- 如何设计和训练大模型(神经网络):从入门到精通!
“学习一门技术,先找一套工具和理论研究下去;千万不要反复横跳,什么都想学”大模型作为未来重要的发展方向,很多人想学习大模型技术,但又苦于无从下手;而本公众号前前后后也写过一些怎么学习大模型技术的方法论;但大部分都是从应用的角度作为切入点。但是,有一个问题就是,如果你是一个技术从业者,想学习和设计一款属于自己的大模型,应该怎么做?设计一个自己的大模型大模型作为一门快速发展的新型技术,其理论与实现也是
- 【人工智能】微调的秘密武器:释放大模型的无限潜能
蒙娜丽宁
Python杂谈人工智能人工智能
《PythonOpenCV从菜鸟到高手》带你进入图像处理与计算机视觉的大门!解锁Python编程的无限可能:《奇妙的Python》带你漫游代码世界在人工智能迅猛发展的今天,大规模语言模型(LLMs)以其强大的通用能力席卷各行各业。然而,如何让这些通用模型在特定领域或任务中发挥最大潜力?答案是微调(Fine-tuning)。本文深入探讨微调的理论基础、技术细节与实践方法,揭示其作为解锁大模型隐藏潜力
- Python实现图像处理的快速傅里叶变换(FFT)或离散余弦变换(DCT)
闲人编程
图像处理图像处理python计算机视觉FFTDCT傅里叶离散余弦变换
目录Python实现图像处理的快速傅里叶变换(FFT)或离散余弦变换(DCT)一、引言1.1图像处理简介1.2快速傅里叶变换与离散余弦变换简介1.3本文目标与结构二、理论背景与数学原理2.1快速傅里叶变换(FFT)介绍2.2离散余弦变换(DCT)介绍2.3两者的应用领域与区别三、算法实现3.1快速傅里叶变换(FFT)实现3.1.1使用Python实现FFT3.1.2图像的频域处理3.2离散余弦变换
- 【架构专题】架构风格(上):从理论到实践的全面解析
A.说学逗唱的Coke
架构
架构风格详解:从理论到实践的全面解析一、引言在软件系统设计中,架构风格是决定系统质量与可维护性的核心要素。根据软考高级资格考试大纲要求,系统架构设计师需掌握软件架构风格的定义、分类及选型方法。本文将结合Garlan和Shaw的经典理论,结合软考实践案例,系统阐述架构风格的理论基础与应用策略。二、架构风格的定义与核心要素2.1定义软件架构风格是描述特定应用领域中系统组织方式的惯用模式,其本质是通过构
- 高级 Python 测试工程师学习提升计划
code36
python学习开发语言测试爬虫高级测试
一、测试理论与流程夯实系统梳理:每周安排3-4小时,深入研读软件测试的艺术、Google软件测试之道,重点强化功能、性能、安全性测试流程,整理流程关键节点与执行要点笔记。实践模拟:基于线上开源项目(如GitHub找小型Web应用),每月开展2次全流程测试实践,从需求分析到测试报告输出,巩固理论应用。二、Python及测试工具深化Python进阶:利用Python高级课程资料,主攻面向对象编程、装饰
- 学习笔记丨信号处理新趋势:量子计算将如何颠覆传统DSP?
棱镜研途
量子计算信号处理学习人工智能单片机网络安全密码学
在算力需求爆炸式增长的今天,传统数字信号处理(DSP)芯片正面临物理极限的严峻挑战。当经典计算机架构在摩尔定律的黄昏中挣扎时,量子计算正以颠覆性姿态崛起,准备重新定义信号处理的未来图景。目录传统DSP的瓶颈:经典架构的物理极限量子新突破:从理论优越到实用跨越量子DSP的颠覆性优势:算法与架构的双重变革应用场景:从芯片校准到生命科学技术挑战与产业化路径未来已来:量子重塑信号处理传统DSP的瓶颈:经典
- 4、理解线性代数的核心概念与应用
rice5
线性代数第五版深度解析线性代数向量空间子空间
理解线性代数的核心概念与应用1引言线性代数是现代数学的重要分支之一,广泛应用于科学、工程、计算机科学等领域。理解线性代数的基本概念和原理不仅有助于学术研究,还能够提升解决实际问题的能力。本文将深入探讨线性代数中的核心概念,帮助读者建立坚实的理论基础,并掌握实际应用技巧。2向量空间向量空间是线性代数的基础概念之一。一个向量空间(V)是指一个集合,其元素称为向量,并且这些向量之间可以进行加法运算和标量
- Kubernetes在混合云平台中的应用:跨云容器编排实战
AI云原生与云计算技术学院
AI云原生与云计算kubernetes容器云原生ai
Kubernetes在混合云平台中的应用:跨云容器编排实战关键词:Kubernetes,混合云平台,跨云容器编排,容器化,云原生摘要:本文围绕Kubernetes在混合云平台中的应用展开,详细阐述了跨云容器编排的相关技术。首先介绍了混合云及Kubernetes的背景知识,接着深入剖析Kubernetes跨云容器编排的核心概念与架构,讲解了相关算法原理和操作步骤,并通过数学模型进行了理论分析。通过具
- 2025学年湖北省职业院校技能大赛 “信息安全管理与评估”赛项 样题卷(五)
2025学年湖北省职业院校技能大赛“信息安全管理与评估”赛项样题卷(五)第二部分:网络安全事件响应、数字取证调查、应用程序安全任务书任务1:应急响应(可以培训有答案)任务2:通信数据分析取证(40分)任务3:基于Windows计算机单机取证(120分)第三部分应用程序安全任务4:C代码审计(40分)第三部分:网络安全渗透、理论技能与职业素养任务一:门户网站(60分)可以培训任务二:办公系统(60分
- 一个LoRa网关的容量多大?
豆豆在西安
LoRa网关网络服务器运维
在LoRaWAN网络部署过程中,客户最常问的问题之一就是:“一个LoRa网关能接入多少设备?”这个问题看似简单,实则涉及多个技术参数和业务场景。LoRa网关的容量并不是一个固定的数字,而是受到多种因素的影响。本文将带你深入了解LoRa网关的系统容量是如何计算的,以及影响容量的关键因素。一、LoRa网关的理论最大容量LoRa网关的容量与其使用的信道数量和扩频因子(SF)密切相关。以常见的8信道LoR
- 代码随想录|图论理论基础
1.图的种类(有向图和无向图)有向图:图中边有方向无向图:图中边无方向加权有向图:图中边是有权值和方向的,无向图也是如此2.度(无向图中有几条边连接该节点,该节点就有几度)出度:从该节点出发的边的个数入度:指向该节点边的个数3.连通性(在图中表示节点的联通情况,我们称之为连通性)连通图:在无向图中,任何两个节点都是可以到达的(可以借助其他节点)非连通图:有节点不能到达其他节点强连通图:在有向图中,
- 三生原理形式化证明:如何解决Coq工具仅覆盖部分逻辑链问题?
葫三生
三生学派算法数学建模人工智能机器学习量子计算
AI辅助创作:解决Coq工具仅覆盖部分逻辑链的问题,需结合理论扩展、工程优化与协作机制进行系统性改进,具体方案如下:一、理论层面:扩展等价判定能力补充外延式等价关系通过扩展归纳构造演算(CIC)理论,在内涵等价判定基础上增加外延式理论(如Presburger代数),增强对自然数类型等复杂结构的等价验证能力,覆盖原有工具无法判定的逻辑分支。构建抽象约束框架设计通用约束规则,使满足条件的任
- 代码随想录|图论|04广度优先搜索理论基础
Paper Clouds
图论宽度优先算法数据结构leetcodec++
广搜的使用场景广搜的搜索方式就适合于解决两个点之间的最短路径问题。因为广搜是从起点出发,以起始点为中心一圈一圈进行搜索,一旦遇到终点,记录之前走过的节点就是一条最短路。当然,也有一些问题是广搜和深搜都可以解决的,例如岛屿问题,这类问题的特征就是不涉及具体的遍历方式,只要能把相邻且相同属性的节点标记上就行。(我们会在具体题目讲解中详细来说)比如下面这个图,从start开始慢慢向外扩展,第4次扩展才到
- 51单片机基础与应用实例解析
大数据无毛兽
本文还有配套的精品资源,点击获取简介:本课程设计项目专注于51单片机的基础知识和应用实践,适合初学者。51单片机是微控制器的经典代表,广泛应用于教育和工业等领域。项目通过20个实例,涵盖C语言编程、单片机内部结构、I/O操作、定时器和计数器、中断系统、串行通信、晶振和复位电路、编程和调试、实验板使用以及项目实现等多个关键知识点,帮助学生掌握单片机的编程和应用技能,并将理论知识转化为实际操作能力。1
- 多通道时间间隔测量模块在时频行业的重要性
西安同步高经理
网络
时间间隔测量在科学研究、工程技术、日常生活等多个领域都具有重要的意义和作用,具体如下:科学研究物理学研究:在粒子物理实验中,精确测量粒子的寿命、衰变时间间隔等,有助于了解粒子的性质和相互作用规律。例如,通过测量μ子的衰变时间间隔,验证了相对论的时间膨胀效应。在原子物理中,对原子跃迁过程中时间间隔的测量,可用于研究原子的能级结构和光谱特性,为量子力学理论的发展和验证提供重要依据。天文学观测:测量天体
- 特斯拉及新能源车企笔试面试题型解析上-21期
启芯硬件笔记
经验分享PCBEMI硬件工程面试职场和发展
本专栏预计更新90期左右。当前第21期-特斯拉硬件.特斯拉作为全球领先的电动汽车、能源存储和人工智能公司,其硬件工程师岗位的招聘通常包括笔试和多轮技术面试,考察领域涵盖数字电路设计、模拟电路、嵌入式系统、电动车技术和自动驾驶等。由于特斯拉的创新性和技术领先地位,其面试问题可能更加注重实际应用和问题解决能力。笔试通常旨在考察候选人的基础理论知识、问题分析能力、电路设计与调试经验、以及对相关工具和方法
- springmvc 下 freemarker页面枚举的遍历输出
杨白白
enumfreemarker
spring mvc freemarker 中遍历枚举
1枚举类型有一个本地方法叫values(),这个方法可以直接返回枚举数组。所以可以利用这个遍历。
enum
public enum BooleanEnum {
TRUE(Boolean.TRUE, "是"), FALSE(Boolean.FALSE, "否");
- 实习简要总结
byalias
工作
来白虹不知不觉中已经一个多月了,因为项目还在需求分析及项目架构阶段,自己在这段
时间都是在学习相关技术知识,现在对这段时间的工作及学习情况做一个总结:
(1)工作技能方面
大体分为两个阶段,Java Web 基础阶段和Java EE阶段
1)Java Web阶段
在这个阶段,自己主要着重学习了 JSP, Servlet, JDBC, MySQL,这些知识的核心点都过
了一遍,也
- Quartz——DateIntervalTrigger触发器
eksliang
quartz
转载请出自出处:http://eksliang.iteye.com/blog/2208559 一.概述
simpleTrigger 内部实现机制是通过计算间隔时间来计算下次的执行时间,这就导致他有不适合调度的定时任务。例如我们想每天的 1:00AM 执行任务,如果使用 SimpleTrigger,间隔时间就是一天。注意这里就会有一个问题,即当有 misfired 的任务并且恢复执行时,该执行时间
- Unix快捷键
18289753290
unixUnix;快捷键;
复制,删除,粘贴:
dd:删除光标所在的行 &nbs
- 获取Android设备屏幕的相关参数
酷的飞上天空
android
包含屏幕的分辨率 以及 屏幕宽度的最大dp 高度最大dp
TextView text = (TextView)findViewById(R.id.text);
DisplayMetrics dm = new DisplayMetrics();
text.append("getResources().ge
- 要做物联网?先保护好你的数据
蓝儿唯美
数据
根据Beecham Research的说法,那些在行业中希望利用物联网的关键领域需要提供更好的安全性。
在Beecham的物联网安全威胁图谱上,展示了那些可能产生内外部攻击并且需要通过快速发展的物联网行业加以解决的关键领域。
Beecham Research的技术主管Jon Howes说:“之所以我们目前还没有看到与物联网相关的严重安全事件,是因为目前还没有在大型客户和企业应用中进行部署,也就
- Java取模(求余)运算
随便小屋
java
整数之间的取模求余运算很好求,但几乎没有遇到过对负数进行取模求余,直接看下面代码:
/**
*
* @author Logic
*
*/
public class Test {
public static void main(String[] args) {
// TODO A
- SQL注入介绍
aijuans
sql注入
二、SQL注入范例
这里我们根据用户登录页面
<form action="" > 用户名:<input type="text" name="username"><br/> 密 码:<input type="password" name="passwor
- 优雅代码风格
aoyouzi
代码
总结了几点关于优雅代码风格的描述:
代码简单:不隐藏设计者的意图,抽象干净利落,控制语句直截了当。
接口清晰:类型接口表现力直白,字面表达含义,API 相互呼应以增强可测试性。
依赖项少:依赖关系越少越好,依赖少证明内聚程度高,低耦合利于自动测试,便于重构。
没有重复:重复代码意味着某些概念或想法没有在代码中良好的体现,及时重构消除重复。
战术分层:代码分层清晰,隔离明确,
- 布尔数组
百合不是茶
java布尔数组
androi中提到了布尔数组;
布尔数组默认的是false, 并且只会打印false或者是true
布尔数组的例子; 根据字符数组创建布尔数组
char[] c = {'p','u','b','l','i','c'};
//根据字符数组的长度创建布尔数组的个数
boolean[] b = new bool
- web.xml之welcome-file-list、error-page
bijian1013
javaweb.xmlservleterror-page
welcome-file-list
1.定义:
<welcome-file-list>
<welcome-file>login.jsp</welcome>
</welcome-file-list>
2.作用:用来指定WEB应用首页名称。
error-page1.定义:
<error-page&g
- richfaces 4 fileUpload组件删除上传的文件
sunjing
clearRichfaces 4fileupload
页面代码
<h:form id="fileForm"> <rich:
- 技术文章备忘
bit1129
技术文章
Zookeeper
http://wenku.baidu.com/view/bab171ffaef8941ea76e05b8.html
http://wenku.baidu.com/link?url=8thAIwFTnPh2KL2b0p1V7XSgmF9ZEFgw4V_MkIpA9j8BX2rDQMPgK5l3wcs9oBTxeekOnm5P3BK8c6K2DWynq9nfUCkRlTt9uV
- org.hibernate.hql.ast.QuerySyntaxException: unexpected token: on near line 1解决方案
白糖_
Hibernate
文章摘自:http://blog.csdn.net/yangwawa19870921/article/details/7553181
在编写HQL时,可能会出现这种代码:
select a.name,b.age from TableA a left join TableB b on a.id=b.id
如果这是HQL,那么这段代码就是错误的,因为HQL不支持
- sqlserver按照字段内容进行排序
bozch
按照内容排序
在做项目的时候,遇到了这样的一个需求:
从数据库中取出的数据集,首先要将某个数据或者多个数据按照地段内容放到前面显示,例如:从学生表中取出姓李的放到数据集的前面;
select * fro
- 编程珠玑-第一章-位图排序
bylijinnan
java编程珠玑
import java.io.BufferedWriter;
import java.io.File;
import java.io.FileWriter;
import java.io.IOException;
import java.io.Writer;
import java.util.Random;
public class BitMapSearch {
- Java关于==和equals
chenbowen00
java
关于==和equals概念其实很简单,一个是比较内存地址是否相同,一个比较的是值内容是否相同。虽然理解上不难,但是有时存在一些理解误区,如下情况:
1、
String a = "aaa";
a=="aaa";
==> true
2、
new String("aaa")==new String("aaa
- [IT与资本]软件行业需对外界投资热情保持警惕
comsci
it
我还是那个看法,软件行业需要增强内生动力,尽量依靠自有资金和营业收入来进行经营,避免在资本市场上经受各种不同类型的风险,为企业自主研发核心技术和产品提供稳定,温和的外部环境...
如果我们在自己尚未掌握核心技术之前,企图依靠上市来筹集资金,然后使劲往某个领域砸钱,然
- oracle 数据块结构
daizj
oracle块数据块块结构行目录
oracle 数据块是数据库存储的最小单位,一般为操作系统块的N倍。其结构为:
块头--〉空行--〉数据,其实际为纵行结构。
块的标准大小由初始化参数DB_BLOCK_SIZE指定。具有标准大小的块称为标准块(Standard Block)。块的大小和标准块的大小不同的块叫非标准块(Nonstandard Block)。同一数据库中,Oracle9i及以上版本支持同一数据库中同时使用标
- github上一些觉得对自己工作有用的项目收集
dengkane
github
github上一些觉得对自己工作有用的项目收集
技能类
markdown语法中文说明
回到顶部
全文检索
elasticsearch
bigdesk elasticsearch管理插件
回到顶部
nosql
mapdb 支持亿级别map, list, 支持事务. 可考虑做为缓存使用
C
- 初二上学期难记单词二
dcj3sjt126com
englishword
dangerous 危险的
panda 熊猫
lion 狮子
elephant 象
monkey 猴子
tiger 老虎
deer 鹿
snake 蛇
rabbit 兔子
duck 鸭
horse 马
forest 森林
fall 跌倒;落下
climb 爬;攀登
finish 完成;结束
cinema 电影院;电影
seafood 海鲜;海产食品
bank 银行
- 8、mysql外键(FOREIGN KEY)的简单使用
dcj3sjt126com
mysql
一、基本概念
1、MySQL中“键”和“索引”的定义相同,所以外键和主键一样也是索引的一种。不同的是MySQL会自动为所有表的主键进行索引,但是外键字段必须由用户进行明确的索引。用于外键关系的字段必须在所有的参照表中进行明确地索引,InnoDB不能自动地创建索引。
2、外键可以是一对一的,一个表的记录只能与另一个表的一条记录连接,或者是一对多的,一个表的记录与另一个表的多条记录连接。
3、如
- java循环标签 Foreach
shuizhaosi888
标签java循环foreach
1. 简单的for循环
public static void main(String[] args) {
for (int i = 1, y = i + 10; i < 5 && y < 12; i++, y = i * 2) {
System.err.println("i=" + i + " y="
- Spring Security(05)——异常信息本地化
234390216
exceptionSpring Security异常信息本地化
异常信息本地化
Spring Security支持将展现给终端用户看的异常信息本地化,这些信息包括认证失败、访问被拒绝等。而对于展现给开发者看的异常信息和日志信息(如配置错误)则是不能够进行本地化的,它们是以英文硬编码在Spring Security的代码中的。在Spring-Security-core-x
- DUBBO架构服务端告警Failed to send message Response
javamingtingzhao
架构DUBBO
废话不多说,警告日志如下,不知道有哪位遇到过,此异常在服务端抛出(服务器启动第一次运行会有这个警告),后续运行没问题,找了好久真心不知道哪里错了。
WARN 2015-07-18 22:31:15,272 com.alibaba.dubbo.remoting.transport.dispatcher.ChannelEventRunnable.run(84)
- JS中Date对象中几个用法
leeqq
JavaScriptDate最后一天
近来工作中遇到这样的两个需求
1. 给个Date对象,找出该时间所在月的第一天和最后一天
2. 给个Date对象,找出该时间所在周的第一天和最后一天
需求1中的找月第一天很简单,我记得api中有setDate方法可以使用
使用setDate方法前,先看看getDate
var date = new Date();
console.log(date);
// Sat J
- MFC中使用ado技术操作数据库
你不认识的休道人
sqlmfc
1.在stdafx.h中导入ado动态链接库
#import"C:\Program Files\Common Files\System\ado\msado15.dll" no_namespace rename("EOF","end")2.在CTestApp文件的InitInstance()函数中domodal之前写::CoIniti
- Android Studio加速
rensanning
android studio
Android Studio慢、吃内存!启动时后会立即通过Gradle来sync & build工程。
(1)设置Android Studio
a) 禁用插件
File -> Settings... Plugins 去掉一些没有用的插件。
比如:Git Integration、GitHub、Google Cloud Testing、Google Cloud
- 各数据库的批量Update操作
tomcat_oracle
javaoraclesqlmysqlsqlite
MyBatis的update元素的用法与insert元素基本相同,因此本篇不打算重复了。本篇仅记录批量update操作的
sql语句,懂得SQL语句,那么MyBatis部分的操作就简单了。 注意:下列批量更新语句都是作为一个事务整体执行,要不全部成功,要不全部回滚。
MSSQL的SQL语句
WITH R AS(
SELECT 'John' as name, 18 as
- html禁止清除input文本输入缓存
xp9802
input
多数浏览器默认会缓存input的值,只有使用ctl+F5强制刷新的才可以清除缓存记录。如果不想让浏览器缓存input的值,有2种方法:
方法一: 在不想使用缓存的input中添加 autocomplete="off"; eg: <input type="text" autocomplete="off" name