OpenGLES Android篇零基础系列(二):OpenGL各坐标系及模型矩阵(ModelViewMatrix),投影矩阵(ProjectionMatrix)等的深入理解
上一篇我们粗略的介绍了下GLES20 中 GLSurfaceView以及Render接口的使用。
对于三角形顶点坐标的定义并没有做出注释,其实在官方的ApiDemo中,它也是赤裸裸的,一个注释都没有,且代码写得一点都不敢恭维,不知道那位同行现在是不是还在google里面。下面贴出一小段官方的ApiDemo中的代码,一起鉴赏鉴赏:
private static final int FLOAT_SIZE_BYTES = 4;
private static final int TRIANGLE_VERTICES_DATA_STRIDE_BYTES = 5 * FLOAT_SIZE_BYTES;
private static final int TRIANGLE_VERTICES_DATA_POS_OFFSET = 0;
private static final int TRIANGLE_VERTICES_DATA_UV_OFFSET = 3;
private final float[] mTriangleVerticesData = {
// X, Y, Z, U, V
-1.0f, -0.5f, 0, 0.0f, 0.5f,
1.0f, -0.5f, 0, 1.0f, 0.5f,
0.0f, 1.0f, 0, 0.0f, 1.0f };如上,你们能看懂吗?在定义三角形顶点坐标数据时,仅仅只是简单粗暴的注释X,Y,Z,U,V,其中X,Y,Z好理解,可这U,V又是什么呢?X,Y,Z,U,V它们之间又有什么联系呢?
如果仅仅只是想从ApiDemo里面去研究,去搞懂它们是什么,怎么用,那估计不是一天两天的事,还得从浩瀚的网络中去查找。
正文:坐标系
OpenGL有6种坐标系,分别如下:
- 1,物体或模型坐标系(Object or model coordinates);
- 2,世界坐标系(World coordinates)
- 3,眼坐标或相机坐标(Eye (or Camera) coordinates)
- 4,裁剪坐标系(Clip coordinates)
- 5,标准设备坐标系(Normalized device coordinates)
- 6,屏幕坐标系(Window (or screen) coordinates)
除了上面6种外,OpenGL还存在一种假想坐标系纹理坐标系,这个坐标系是不存在的,它其实是一系列变换矩阵的结果,比如它能使顶点从物体或模型坐标系变换到世界坐标系。
从object coordainates到world coordinates再到camera coordinate的变换,在OpenGL中统一称为model-view转换,初始化的时候,object coordinates和world coordinates还有camera coordinates坐标重合在原点,变换矩阵都为Identity,所以在OpenGL中用glLoadIdentity()初始化变换矩阵栈。model-view matix转换points,vectorsd到camera坐标系。
OpenGL 的重要功能之一就是将三维的世界坐标经过变换、投影等计算,最终算出它在显示设备上对应的位置,这个位置就称为设备坐标。在屏幕、打印机等设备上的坐标是二维坐标。值得一提的是,OpenGL可以只使用设备的一部分进行绘制,这个部分称为视区或视口(viewport)。投影得到的是视区内的坐标(投影坐标),从投影坐标到设备坐标的计算过程就是设备变换了。
我们在OpenGL ES中常用到的几种坐标系:世界坐标系、物体坐标系、设备坐标系、眼坐标系当然还有假想的纹理坐标系
一、屏幕坐标系
对于移动设备来说,我们都知道,左上角为坐标原点,向右为X轴,向下为Y轴。如下图(图画的丑了点,先忍忍啊^_^):

二、世界坐标系
这个世界坐标系是针对OpenGL来说明的。即三维坐标系X,Y,Z.
它有一个漂亮的学名:右手笛卡尔坐标系统,这个坐标系常用来描述物体及光源的位置。
在移动设备中,屏幕中心为坐标三点,水平向右为X轴,在原点垂直X轴向上为Y轴,在原点垂直X,Y轴指向屏幕外为Z轴(正面对手机屏幕,直戳你眼睛的就是Z轴),同样如下图:

将物体放到场景中也就是将物体平移到特定位置、旋转一定角度,这些操作就是坐标变换。OpenGL中提供了glTranslate*/glRotate*/glScale*三条坐标变换命令,利用OpenGL的矩阵运算命令,则可以实现任意复杂的坐标变换。
在这里还要提一个重要的概念:坐标变换矩阵栈(ModelView)
坐标变换矩阵栈
用来存储一系列的变换矩阵,栈顶就是当前坐标的变换矩阵,进入OpenGL管道的每个坐标(齐次坐标)都会先乘上这个矩阵,结果才是对应点在场景中的世界坐标。OpenGL中的坐标变换都是通过矩阵运算完成的。
如图:

ModelViewMatrix:模型矩阵
ProjectionMatrix:投影矩阵
三、纹理坐标系
通过上一节,我们知道,纹理是图片,视频等的一种渲染方式,图片只有通过纹理才能加载到GLES中。
因此纹理坐标系是指图片,视频等在手机屏幕上的坐标系,即U,V也有叫ST。该坐标系是一种假想坐标系,并不真正存在的,只是变换矩阵的结果。下面就统一叫UV坐标系。
当应用初始化时,UV坐标系与三维坐标系(世界坐标系)重合。
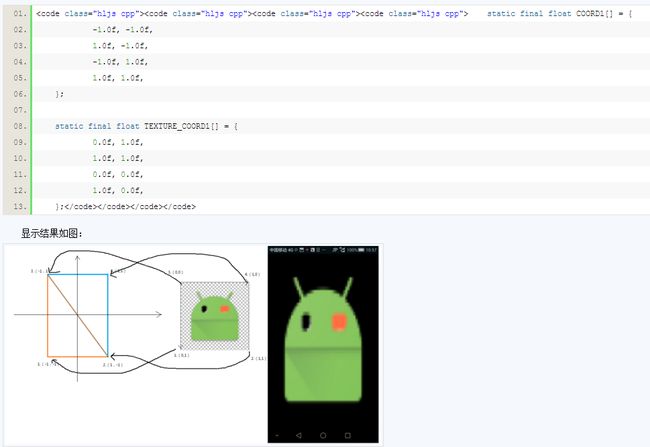
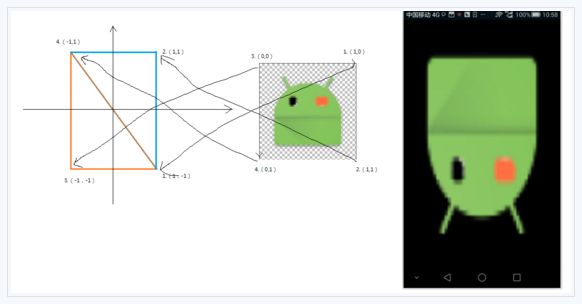
我们要注意的是,在OpenGL绘制过程中,它是可以选择绘制模式的,比如:点,线,面,且都是坐标集合里面进行顺序绘制的。i.e.:
private final float[] mTriangleVerticesData = {
// X, Y, Z,
-1.0f, -0.5f, 0, //1
1.0f, -0.5f, 0, //2
0.0f, 1.0f, 0, //3
};当我们以纹理的形式加载一个图片到OpenGL中时,如何让它显示在世界坐标系中呢?这时就用到了纹理贴图的方式(即根据在世界坐标系中绘制顶点的先后顺序,把UV坐标系中的坐标与其一一对应),画图更加直接(从网上copy的图,在此感谢):
四、物体坐标系
物体坐标系是以物体的某一个点为原点来建立的三维坐标系(世界坐标系)。仅针对该物体。物体放到场景中时,各部分经历的坐标变换矩阵相同,相对位置不变,所以可视为一个整体
五、眼坐标系或相机坐标系
以视点为原点,以视线的方向为Z+轴正方向的坐标系中的方向。OpenGL管道会将世界坐标先变换到眼坐标,然后进行裁剪,只有在视线范围(视见体)之内的场景才会进入下一阶段的计算。
六、裁剪坐标系
由眼坐标可知,OpenGL管道首先会将目标从世界坐标变换到眼坐标,然后对视线范围外的部分进行裁剪。
裁剪过程中用到投影变换矩阵栈(ProjectionMatrix),栈顶矩阵就是当前投影变换矩阵,负责将场景各坐标变换到眼坐标,由所得到的结果是裁剪后的场景部分,称为裁剪坐标
我们上面说到了ModelViewMatrix 与ProjectionMatrix两个矩阵栈,那矩阵栈是怎么切换的呢?
用函数:glMatrixMode(GL_MODELVIEWING或GL_PROJECTION);本命令执行后参数所指矩阵栈就成为当前矩阵栈,以后的矩阵栈操纵命令将作用于它。
紧接着glMatrixMode()就是初始化矩阵,我们在上面也讲到,所有矩阵都为Identity,所以用方法glLoadIdentity()初始化矩阵。
上一节
参考资料
OpenGL坐标系介绍
OpenGL中各种坐标系的理解
Android OpenGL20 世界坐标系,屏幕坐标系,纹理坐标系
Android OpenGL 坐标系
详解OpenGL的坐标系、投影和几何变换-矩阵压栈思想/矩阵列式存储
OpenGL 矩阵变换(讲的太好了~!)