精密单点定位之PPPH解算及其gamit/globk精度评定
精密单点定位之PPPH解算及其gamit/globk精度评定
PPPH A MATLAB-based Software for Multi-GNSS Precise Point Positioning Analysis
本文下载链接: https://download.csdn.net/download/u011322358/12243431
1. Introduction
Over the last decades, Precise Point Positioning (PPP) has become a viable alternative to differential and/or relative positioning techniques which dominates the GNSS com- munity. Even though PPP enables centimeter- or millimeter-level positioning accuracy with only one receiver in the global scale, it still requires a quite long observation period to achieve high positioning accuracy. This period, typically called convergence time, is the main drawback of PPP which restricts its widespread adoption. In recent years, the completion of GLONASS constellation and the emergence of new satellite systems offer considerable opportunity to improve the PPP performance in terms of positioning accuracy and convergence time due to providing additional frequencies and satellite re- sources. On the other hand, the integration of multi-GNSS observations entails more complex models and algorithms compared with the traditional PPP approach that includes GPS observations only. Considering the limited number of the alternatives, PPPH was developed to benefit the potential advantages of the multi-constellation and multi-frequency GNSS. PPPH is a GNSS analysis software, which can perform multi- GNSS PPP analyses processing GPS, GLONASS, BeiDou, and Galileo observations. Through its user-friendly graphical user interface, PPPH allows users to specify the options, models, and parameters related to PPP process. Furthermore, several analysis tools are provided by PPPH to assess the results obtained.
2. Installation
PPPH was developed in MATLAB environment since its matrix-based structure and built-in graphics are highly suitable for technical computing, programming, and data visualization. PPPH does not entail any toolbox or function except for MATLAB core files. Two steps should be followed to open the graphical user interface (GUI) of PPPH:
(1) add the folder containing the source codes of PPPH into MATLAB search path
(2) type PPPH in MATLAB command line.
The interface of PPPH was developed using the MATLAB App Designer which is a spe- cial environment to design and develop the visual components of a user interface. For this reason, MATLAB version 2016a or newer is required for running PPPH. Further- more, PPPH can be used with no problem in any operating system where MATLAB has been installed, such as Windows, Mac, Unix/Linux, etc.
3. PPPH
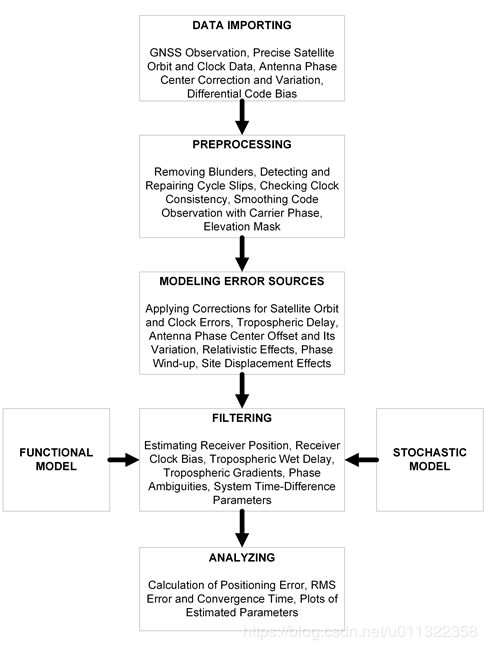
PPPH is able to perform multi-GNSS PPP including GPS, GLONASS, Galileo and BeiDou observations. PPPH utilizes undifferenced ionosphere-free multi-GNSS PPP model. PPPH allows specifying options, models, and parameters about PPP processing
through its user-friendly interface. Fundamentally, PPPH consists of five main com- ponents which are Data Importing, Preprocessing, Modeling, Filtering, and Analyzing (Figure 1). The first four components utilize related models and theory to provide multi-GNSS PPP solutions, while the last one is employed to evaluate and visualize the results. Each component along with its related options is represented by a separate tab in the user interface.
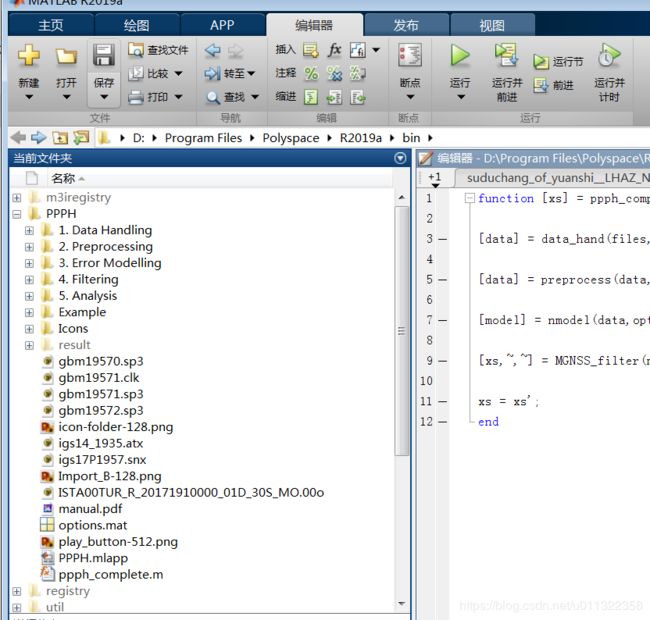
一、运行PPPH中的PPPH.mlapp
点亮PPPH文件夹及子文件夹
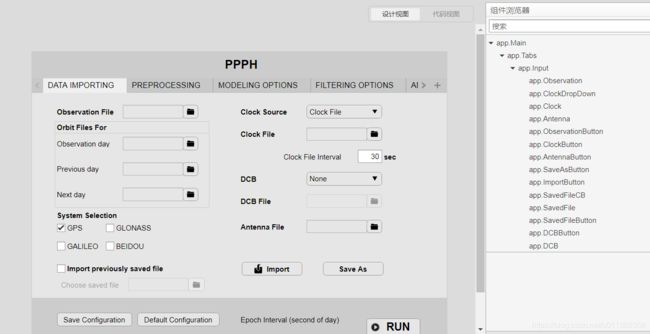
二、设计视图
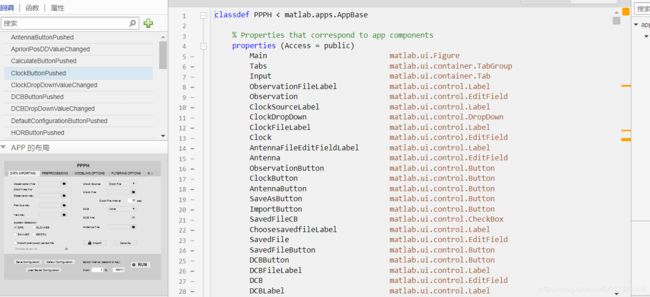
三、代码视图
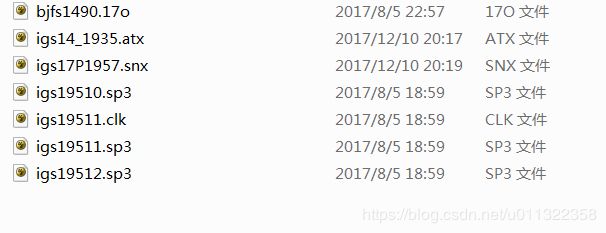
四、加载观测数据
5、run
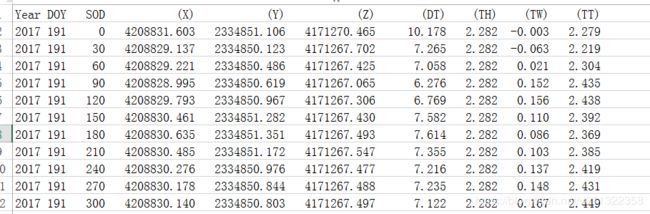
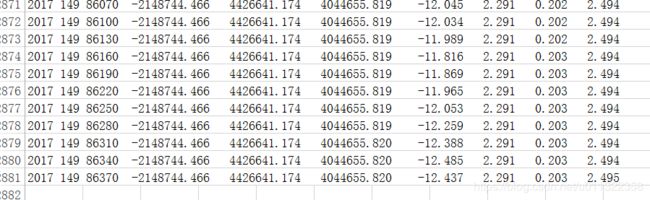
6、result 30s的单历元解
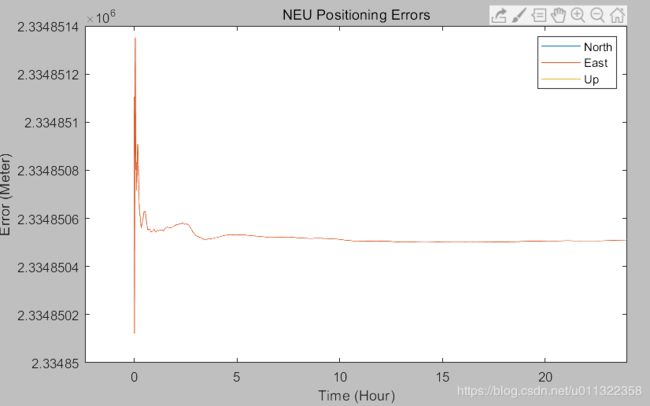
7、NEU positioning errors 坐标收敛情况
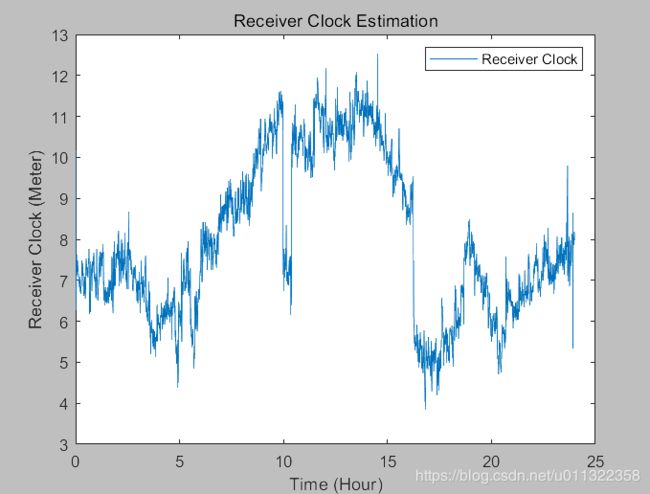
8、 receiver clock estimation
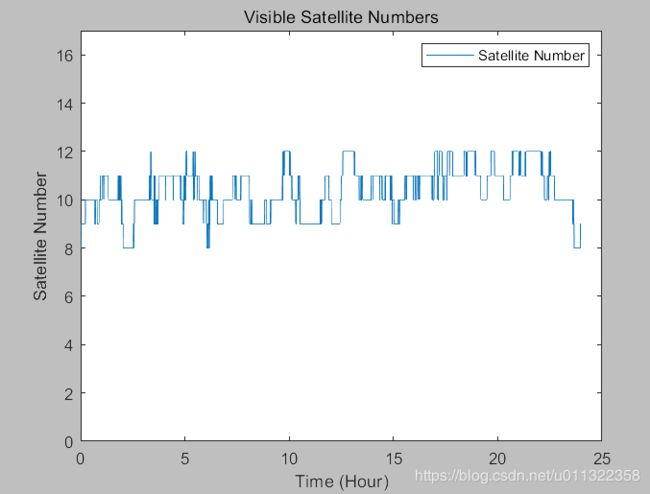
9、visible satelite numbers
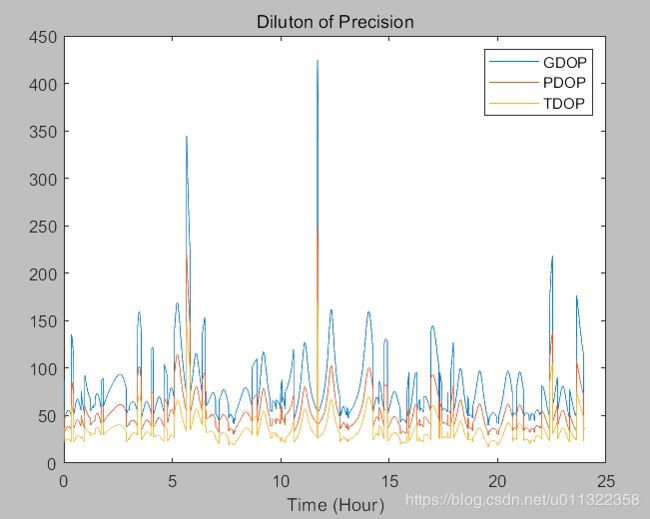
10、 positioning dilution of precision(PDOP) & Geometric Dilution of Precision (GDOP)
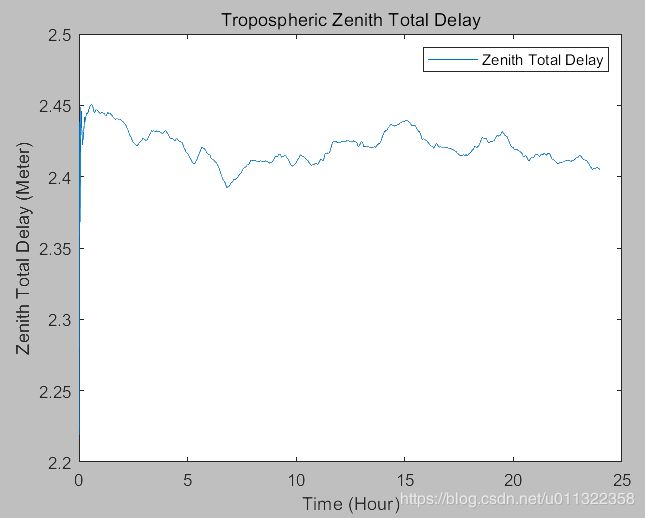
11、tropospheric zenith total delay
PPPH解算及其gamit/globk精度评定
选择BJFS站为测试点,整理格式如下:
PPPH
GAMIT

PPPH解算收敛结果
gamit/globk解算及其结果

