基于MIission planner的VTOL垂直起降固定翼航线设计方法
基于MIission planner的VTOL垂直起降固定翼航线设计方法
在此感谢 作者 ID:小明 QQ:1228401538提供的文档帮助资料
航线设计方法一:
1. 连接飞机之前需要做的工作
1.1 打开遥控器,并确保油门处于最低位,SB 开关处于最高位,并且微调全部为 0
1.2 飞机通电(注意:飞机蜂鸣器音乐未播放完之前请勿大幅度晃动飞机)
1.3 打开数传软件并登陆
1.4 打开地面站软件并连接
2 连接地面站
2.1 双击桌面上的图标,启功地面站

2.2 启动后界面如下图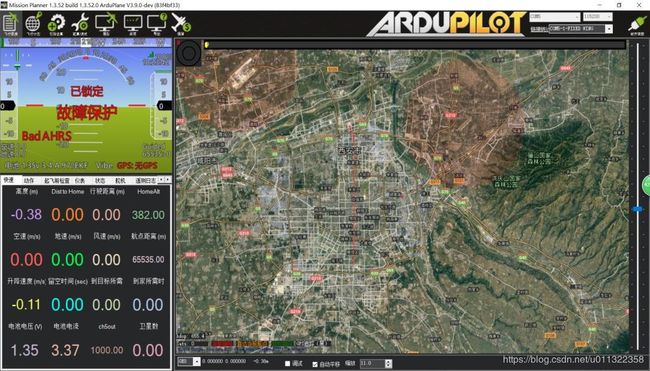
2.3 在主界面右上角选择连接方式为 TCP,波特率为 115200,点击连接。如图
3 检查飞机状态
在每次起飞前我们都应该对飞机做一次简单的检查,检查项目主要包括以下几点
电池电压检查
GPS 卫星数量检查
空速检查
相机拍照检查
3.1 电池电压检查
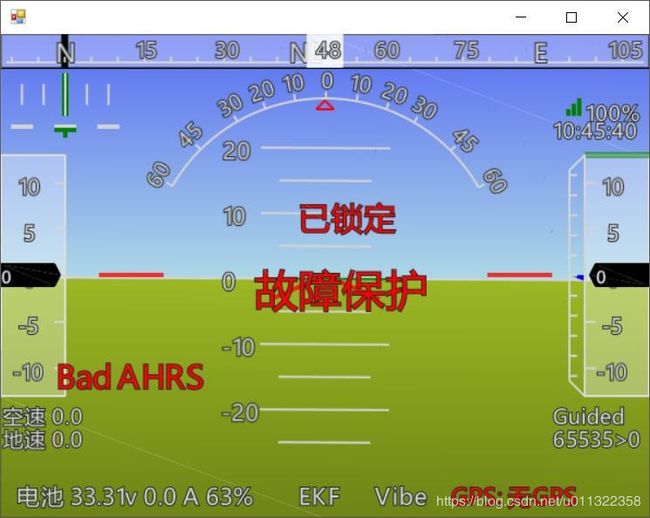 在 hud 面板的左下角检查电池电压,起飞前电压必须在 33.0V 以上,如果低于 33.0V 电池所剩余电量将不足以支持此次飞行。
在 hud 面板的左下角检查电池电压,起飞前电压必须在 33.0V 以上,如果低于 33.0V 电池所剩余电量将不足以支持此次飞行。
注意:此为使用 8S 电池电压,
3.2 GPS 卫星数检查

在此界面检查 GPS 卫星数量和定位精度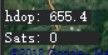
Hdop:定位精度 Sats:卫星数量
每次起飞前卫星数都应该在 12 颗及以上,定位精度都应该在 1 以下,否则飞 机会因为定位不准或精度不够造成偏离航线或 POS 数据与照片位置相差较远。 如果卫星数低于 12 颗或者定位精度大于 1,可将飞机断电从新启动,如果还
是不能解决,或许是因为此处存在干扰源,您需要更换起飞场地。
 3.3 空速检查
3.3 空速检查
在该位置检查空速(此处数据会因地面站版本原因显示略有不同)在空地无风时
空速数值应在 0-2 之间跳动,属正常现象,轻吹空速管,此处数值会随之增大, 如果数值无变化、或者在无风状态下数值较高,您可能需要检查机头是否安装牢 固,并需要校准空速。
校准方法如下:
点击“动作”按钮
选择 PREFLIGHT_CALIBRATION 点击执行动作
3.4 相机拍照检查
开启相机并用快门线连接到飞机上。
 点击动作菜单,选择 Trigger Camera NOW 点击执行动作,此时会听到相机拍 照声音,如果此时相机不拍照,请检查连接。我们也可以通过拨动遥控器上 SD 开关来触发拍照。
点击动作菜单,选择 Trigger Camera NOW 点击执行动作,此时会听到相机拍 照声音,如果此时相机不拍照,请检查连接。我们也可以通过拨动遥控器上 SD 开关来触发拍照。
4 航线规划


4.1 添加起飞点
点击”下方添加”添加一个航点,将航点命令修改为 VTOL_TAKEOFF
ALT(起飞高度)设置为 40 米。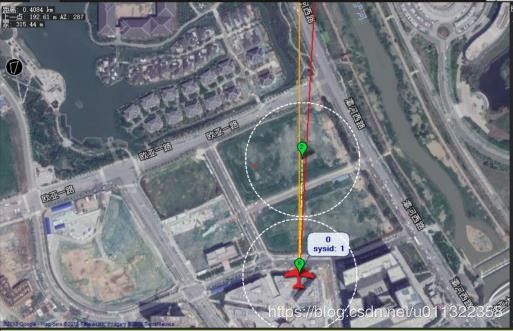

在机头方向(红线为机头方向)前方点击鼠标左键,添加第二个航点,并设置高度为 100 米,我们希望在确保安全的前提下第二点离第一点的距离在 150-300 米之间(太近导致飞机不能完全转换,太远会浪费电量)

添加第三个点,将命令改为 LOITER_TO_ALT(盘旋到高度)将 Radi(盘旋半径)改为 150 米,ALT(高度)改为作业需要的高度。我们希望盘旋点在确保安全的情况下,能尽可能的处于操作手视线内,这样以便我们的观察飞机是否正常。
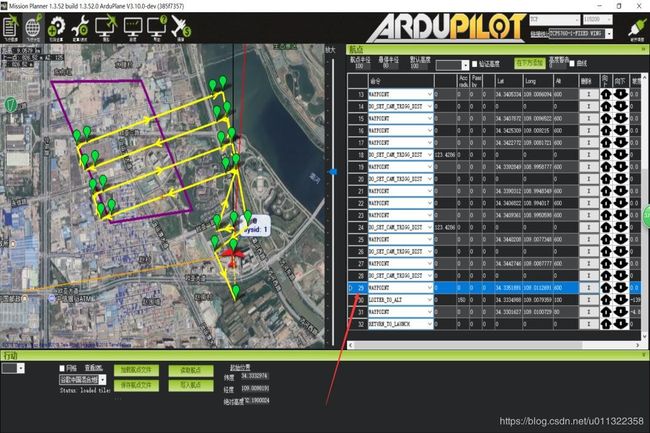
4.2 规划任务区域
4.2.1 导入 KML 区域图
 在空白处右击鼠标,选择地图工具,KML 覆盖,
在空白处右击鼠标,选择地图工具,KML 覆盖, 在“打开”面板选择飞行 KMZ 范围图,点击打开
在“打开”面板选择飞行 KMZ 范围图,点击打开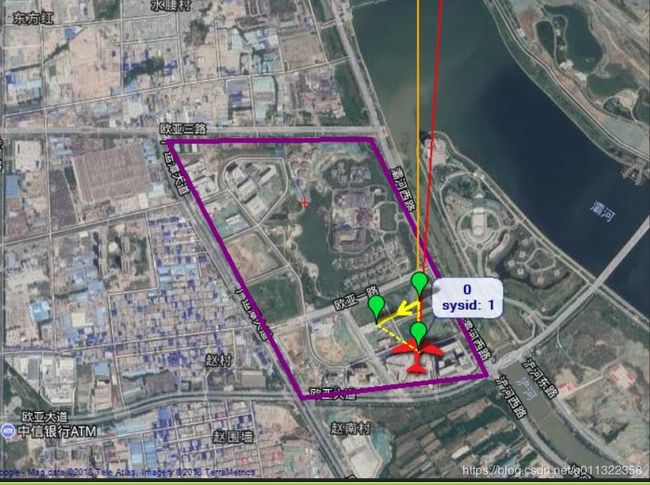 4.2.2 绘制多边形
4.2.2 绘制多边形 在空白处右击鼠标选择绘制多边形,添加多边形点。
在空白处右击鼠标选择绘制多边形,添加多边形点。 依次点击范围线顶点,圈选作业范围,为了能保证作业质量,我们希望多边形 范围能超出 KML 范围线区域
依次点击范围线顶点,圈选作业范围,为了能保证作业质量,我们希望多边形 范围能超出 KML 范围线区域 4.2.3 作业航线规划面板,右击空白区域选择自动航点,Survey(Grid)进入作业航线规划面板,
4.2.3 作业航线规划面板,右击空白区域选择自动航点,Survey(Grid)进入作业航线规划面板, 在右边 Simple 选项卡下,设置相机、航线高度等信息
在右边 Simple 选项卡下,设置相机、航线高度等信息
Camera:选择相机型号。——我们选择 a7r
Alttude(m):设置任务高度。——此处应和起飞航线第三点高度相同。 Angle(deg):设置航线角度。——生成的航线一般来说都是最优角度,不需要手动修
改,但我们仍可通过修改此处角度来达到更优的航线角度。
Camera top facing forward:设置相机方向,不选择为竖向安装,选择为横向安装——
该设备相机为横向安装,请打勾选中。
Flying speed(est)(m/s):航线内空速。此处一般有值,需要选中删除原来值之后输 入空速值,该设备空速值为 18,通过设置该值可以看到航线内大概飞行时间,可为规划航 线做依据。
Use speed for this mission:是否使用该空速。——因为该设备空速在出厂时已经设置 完成,为避免错误操作所带来不可预想的后果,请不要勾选该选项。
Add Takeoff and land WP’S:是否添加起飞航点。——由于起飞航线已手动规划完毕, 请不要勾选该选项。
Use RTL:是否使用返航;——不使用,请不要勾选该选项。 Split into x segments:跨越航线飞行。——不使用,请设置为 1.
Display 显示菜单——以下参数选中为显示,反之不显示 Boundary:范围线 建议选中
Markers:转弯点 建议选中 Grid:自动生成的航线 建议选中 Internals:拍照点 建议不选
Footprints:电脑自动计算出的拍照范围 建议不选 Advanced Options:高级菜单 必须选中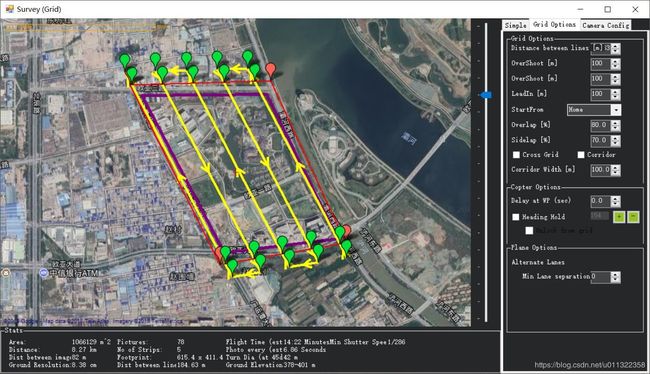
在右边 Grid Options 选项卡下,设置重叠率,以及航线外伸距离
Distance between lines:航线间距离——为电脑自动生成,请不要修改。
Overshoot;leadin:航线向外延伸距离——设置为 100 米,请不要更改。 Starfrom :请选择 home
Overlap【%】:航向重叠率 请根据项目需求设置 Sidelap【%】:旁向重叠率 请根据项目需求设置 Cross grid 交叉航线——请不要勾选
Corridor 带状航线——请不要勾选
 Camera config 里面的参数为相机参数,请不要手动修改。
Camera config 里面的参数为相机参数,请不要手动修改。
4.2.3 在设置完参数之后可以通过界面下方 stats 来查看任务信息
 在确定航线规划无误后可点击 accept 按钮来生成航线
在确定航线规划无误后可点击 accept 按钮来生成航线
5 降落航线
确认航线后,生成如下界面 首先,请清除多边形,在空白处点击鼠标右键,绘制多边形,清除多边形
首先,请清除多边形,在空白处点击鼠标右键,绘制多边形,清除多边形 添加过度点:在家的附近添加航点,高度需和航向内高度一致
添加过度点:在家的附近添加航点,高度需和航向内高度一致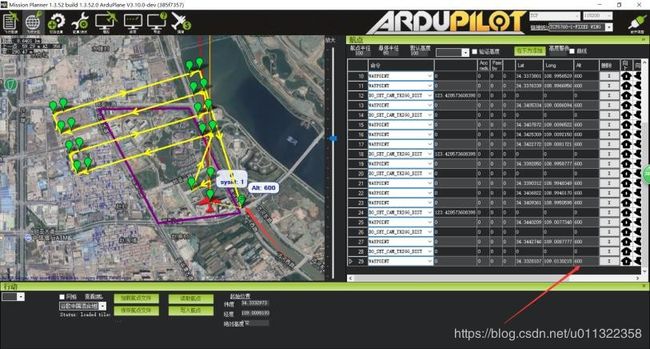 注意:此点是为了引导飞机以任务高度在确保安全的情况下进行返航,如果不添加此过度 点,飞机将会在返航的时候降高,这是非常危险的操作,请务必注意。 添加盘旋点:在空旷处添加航点,将命令改为 LOITER_TO_ALT(盘旋到高度)将 Radi
注意:此点是为了引导飞机以任务高度在确保安全的情况下进行返航,如果不添加此过度 点,飞机将会在返航的时候降高,这是非常危险的操作,请务必注意。 添加盘旋点:在空旷处添加航点,将命令改为 LOITER_TO_ALT(盘旋到高度)将 Radi
(盘旋半径)改为 150 米,ALT(高度)改为 100 米。
 注意:设置盘旋点的时候应留给飞机足够的盘旋空间,如果条件不允许,可与盘旋上升点
注意:设置盘旋点的时候应留给飞机足够的盘旋空间,如果条件不允许,可与盘旋上升点
重合,如若周围无高大建筑物或树木,可将高度适当降低(最低为 80 米)。
添加降落引导点:在飞机后方 100 米左右添加降落引导点,并将高度设置为 80 米。
 注意:我们希望飞机在起飞和降落的时候能遵循逆风起、逆风降的原则,而我们在准备的 时候就已经将机头朝向逆风方向,所以该引导点应该放到飞机正后方,如果条件不允许, 或风速较小,也可以将此点设置到其他位置,但请注意航线上应无建筑物遮挡,或高大树 木。
注意:我们希望飞机在起飞和降落的时候能遵循逆风起、逆风降的原则,而我们在准备的 时候就已经将机头朝向逆风方向,所以该引导点应该放到飞机正后方,如果条件不允许, 或风速较小,也可以将此点设置到其他位置,但请注意航线上应无建筑物遮挡,或高大树 木。
添加返航点:在空白处点击右键,选择返航。
 4.4 检查航线,请严格按照以上操作流程来检查航线与航点命令,确保作业安全。
4.4 检查航线,请严格按照以上操作流程来检查航线与航点命令,确保作业安全。
6 航线保存与写入 点击“保存航点文件”按钮,可将航线保存为文件,以便后期应用。
点击“保存航点文件”按钮,可将航线保存为文件,以便后期应用。
点击“写入航点”按钮,将航点信息写入到飞控 在空白处点击右键,点击清除任务,将任务清除
在空白处点击右键,点击清除任务,将任务清除 在点击“读取航线”按钮,从新读取航线,再次检查,以防航线未能正确写入。
在点击“读取航线”按钮,从新读取航线,再次检查,以防航线未能正确写入。
7 起飞
切换到飞行数据界面,将遥控器开关 SB 切到最上面,此时地面站应显示 Qstabilize 模式,如下图: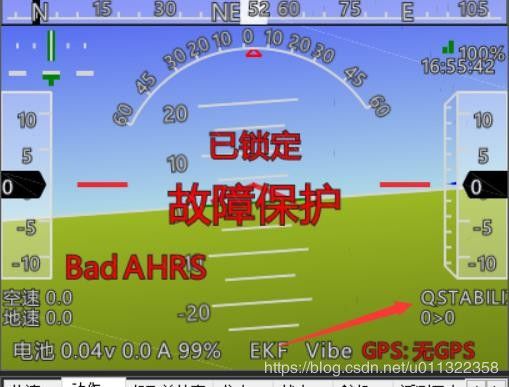
再次检查空速,GPS 卫星数无误,相机及电池盖安装到位,就可以起飞,
先将遥控器左边摇杆拉到右下角 3 秒左右,待飞机螺旋桨开始转动后,将 SB 开关切 到最下边,此时飞机转入自动航线模式,会自动执行任务,并返航。
8 终止作业,
如果在飞行任务中遇到天气原因,需要终止作业,可以在地面站操作,将飞机返航, 操作顺序如下:
在航线规划中找到返航引导点的航点编号
 在飞行数据动作里面选择该航点编号,并点击设置航点。
在飞行数据动作里面选择该航点编号,并点击设置航点。
航线设计方法二:


