InfoGAN 简介与代码实战
1.介绍
在原始gan(GAN 简介与代码实战)中,生成数据的来源一般是一个固定分布噪声z,z可以生成不同的图片,z代表着很多意思,我们无法知道z的那个维度代表什么(比如在生成数字手写图片的时候,0维度是否代表笔画的风格,我们不得而知),z是不可解释的。为了解决这个问题,InfoGAN就横空出世了,更加详细的内容参见论文:Interpretable Representation Learning by Information Maximizing Generative Adversarial Nets
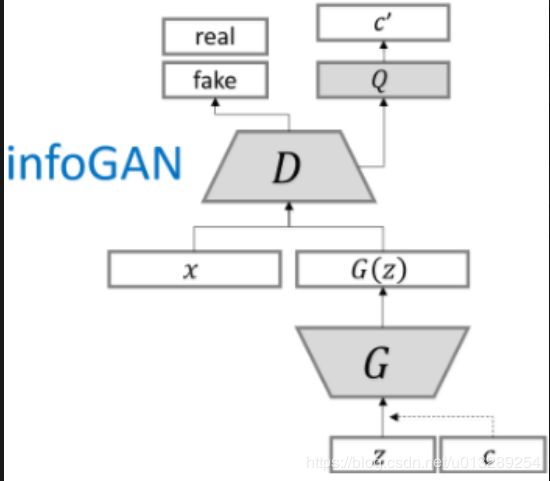
2.模型结构
网络是基于DC-GAN(Deep Convolutional GAN)的,G和D都由CNN构成。在此基础上,Q和D共享卷积网络,然后分别通过各自的全连接层输出不同的内容:Q输出对应于生成图片的c'(与之对应的c是可以控制图片的生成,比如生成什么数字),D则仍然判别真伪。
3.模型特点
相对于原始gan,作者将Z分成z(固定分布噪声)和c(一些隐变量信息,比如笔画风格,字体大小等),损失函数里面用到互信息,使得隐变量c与生成的变量G(z,c)拥有尽可能多的共同信息。

4.代码实现keras
class INFOGAN():
def __init__(self):
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.num_classes = 10
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.latent_dim = 72
optimizer = Adam(0.0002, 0.5)
losses = ['binary_crossentropy', self.mutual_info_loss]
# Build and the discriminator and recognition network
self.discriminator, self.auxilliary = self.build_disk_and_q_net()
self.discriminator.compile(loss=['binary_crossentropy'],
optimizer=optimizer,
metrics=['accuracy'])
# Build and compile the recognition network Q
self.auxilliary.compile(loss=[self.mutual_info_loss],
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# The generator takes noise and the target label as input
# and generates the corresponding digit of that label
gen_input = Input(shape=(self.latent_dim,))
img = self.generator(gen_input)
# For the combined model we will only train the generator
self.discriminator.trainable = False
# The discriminator takes generated image as input and determines validity
valid = self.discriminator(img)
# The recognition network produces the label
target_label = self.auxilliary(img)
# The combined model (stacked generator and discriminator)
self.combined = Model(gen_input, [valid, target_label])
self.combined.compile(loss=losses,
optimizer=optimizer)
def build_generator(self):
model = Sequential()
model.add(Dense(128 * 7 * 7, activation="relu", input_dim=self.latent_dim))
model.add(Reshape((7, 7, 128)))
model.add(BatchNormalization(momentum=0.8))
model.add(UpSampling2D())
model.add(Conv2D(128, kernel_size=3, padding="same"))
model.add(Activation("relu"))
model.add(BatchNormalization(momentum=0.8))
model.add(UpSampling2D())
model.add(Conv2D(64, kernel_size=3, padding="same"))
model.add(Activation("relu"))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(self.channels, kernel_size=3, padding='same'))
model.add(Activation("tanh"))
gen_input = Input(shape=(self.latent_dim,))
img = model(gen_input)
model.summary()
return Model(gen_input, img)
def build_disk_and_q_net(self):
img = Input(shape=self.img_shape)
# Shared layers between discriminator and recognition network
model = Sequential()
model.add(Conv2D(64, kernel_size=3, strides=2, input_shape=self.img_shape, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(128, kernel_size=3, strides=2, padding="same"))
model.add(ZeroPadding2D(padding=((0,1),(0,1))))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(256, kernel_size=3, strides=2, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(512, kernel_size=3, strides=2, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(BatchNormalization(momentum=0.8))
model.add(Flatten())
img_embedding = model(img)
# Discriminator
validity = Dense(1, activation='sigmoid')(img_embedding)
# Recognition
q_net = Dense(128, activation='relu')(img_embedding)
label = Dense(self.num_classes, activation='softmax')(q_net)
# Return discriminator and recognition network
return Model(img, validity), Model(img, label)
def mutual_info_loss(self, c, c_given_x):
"""The mutual information metric we aim to minimize"""
eps = 1e-8
conditional_entropy = K.mean(- K.sum(K.log(c_given_x + eps) * c, axis=1))
entropy = K.mean(- K.sum(K.log(c + eps) * c, axis=1))
return conditional_entropy + entropy
def sample_generator_input(self, batch_size):
# Generator inputs
sampled_noise = np.random.normal(0, 1, (batch_size, 62))
sampled_labels = np.random.randint(0, self.num_classes, batch_size).reshape(-1, 1)
sampled_labels = to_categorical(sampled_labels, num_classes=self.num_classes)
return sampled_noise, sampled_labels
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, y_train), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
X_train = np.expand_dims(X_train, axis=3)
y_train = y_train.reshape(-1, 1)
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random half batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
# Sample noise and categorical labels
sampled_noise, sampled_labels = self.sample_generator_input(batch_size)
gen_input = np.concatenate((sampled_noise, sampled_labels), axis=1)
# Generate a half batch of new images
gen_imgs = self.generator.predict(gen_input)
# Train on real and generated data
d_loss_real = self.discriminator.train_on_batch(imgs, valid)
d_loss_fake = self.discriminator.train_on_batch(gen_imgs, fake)
# Avg. loss
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator and Q-network
# ---------------------
g_loss = self.combined.train_on_batch(gen_input, [valid, sampled_labels])
# Plot the progress
print ("%d [D loss: %.2f, acc.: %.2f%%] [Q loss: %.2f] [G loss: %.2f]" % (epoch, d_loss[0], 100*d_loss[1], g_loss[1], g_loss[2]))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 10, 10
fig, axs = plt.subplots(r, c)
for i in range(c):
sampled_noise, _ = self.sample_generator_input(c)
label = to_categorical(np.full(fill_value=i, shape=(r,1)), num_classes=self.num_classes)
gen_input = np.concatenate((sampled_noise, label), axis=1)
gen_imgs = self.generator.predict(gen_input)
gen_imgs = 0.5 * gen_imgs + 0.5
for j in range(r):
axs[j,i].imshow(gen_imgs[j,:,:,0], cmap='gray')
axs[j,i].axis('off')
fig.savefig("images/%d.png" % epoch)
plt.close()