STM32开发项目:硬件SPI的配置与使用
目录
- 项目背景
- 关于SPI外设
- 硬件连接
- 基本通讯过程
- 工作模式
- 配置流程
- 特别注意
项目背景
笔者在一个高速数据采集项目中进行开发时,遇到了快速频繁读取ADC数据的需求,此时的软件模拟SPI已经无法满足,只能尝试采用硬件SPI对ADC进行读写。
关于SPI外设
SPI 协议是由摩托罗拉公司提出的通讯协议(Serial Peripheral Interface),即串行外围设备接口,是一种高速全双工的通信总线。它被广泛地使用在 ADC、LCD 等设备与 MCU 间,要求通讯速率较高的场合。
与I2C通讯不同,应用SPI接口的器件很多都对通讯速率有一定的要求,使用软件模拟SPI通讯有两个主要的缺点:1.增大MCU的负载,尤其是在大量数据高频收发时;2.数据传输速度无法得到控制与保证。
硬件连接
SPI通讯使用3条总线及片选线,3条总线分别为SCK、MOSI、MISO以及片选线为SS,它们的作用介绍如下:
- SS( Slave Select):从设备选择信号线,常称为片选信号线,也称为 NSS、CS,以下用 NSS 表示。当有多个 SPI从设备与 SPI主机相连时,设备的其它信号线 SCK、MOSI及 MISO同时并联到相同的 SPI总线上,即无论有多少个从设备,都共同只使用这 3条总线;而每个从设备都有独立的这一条 NSS 信号线,本信号线独占主机的一个引脚,即有多少个从设备,就有多少条片选信号线。I2C 协议中通过设备地址来寻址、选中总线上的某个设备并与其进行通讯;而 SPI 协议中没有设备地址,它使用 NSS 信号线来寻址,当主机要选择从设备时,把该从设备的 NSS 信号线设置为低电平,该从设备即被选中,即片选有效,接着主机开始与被选中的从设备进行 SPI通讯。所以 SPI通讯以 NSS 线置低电平为开始信号,以 NSS 线被拉高作为结束信号。
- SCK (Serial Clock):时钟信号线,用于通讯数据同步。它由通讯主机产生,决定了通讯的速率,不同的设备支持的最高时钟频率不一样,如 STM32 的 SPI 时钟频率最大为fpclk/2,两个设备之间通讯时,通讯速率受限于低速设备。
- MOSI (Master Output, Slave Input):主设备输出/从设备输入引脚。主机的数据从这条信号线输出,从机由这条信号线读入主机发送的数据,即这条线上数据的方向为主机到从机。
- MISO(Master Input,,Slave Output):主设备输入/从设备输出引脚。主机从这条信号线读入数据,从机的数据由这条信号线输出到主机,即在这条线上数据的方向为从机到主机。

基本通讯过程
下图所示是一个SPI主机的通讯时序。NSS、SCK、MOSI 信号都由主机控制产生,而 MISO 的信号由从机产生,主机通过该信号线读取从机的数据。MOSI 与 MISO 的信号只在 NSS 为低电平的时候才有效,在 SCK 的每个时钟周期 MOSI 和 MISO 传输一位数据。
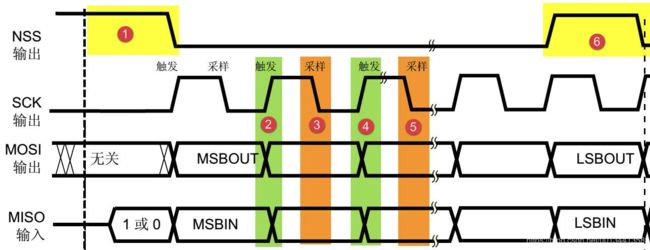 在标号(1)处,NSS 信号线由高变低,是 SPI 通讯的起始信号。NSS 是每个从机各自独占的信号线,当从机在自己的 NSS 线检测到起始信号后,就知道自己被主机选中了,开始准备与主机通讯。在图中的标号(6)处,NSS 信号由低变高,是 SPI 通讯的停止信号,表示本次通讯结束,从机的选中状态被取消。
在标号(1)处,NSS 信号线由高变低,是 SPI 通讯的起始信号。NSS 是每个从机各自独占的信号线,当从机在自己的 NSS 线检测到起始信号后,就知道自己被主机选中了,开始准备与主机通讯。在图中的标号(6)处,NSS 信号由低变高,是 SPI 通讯的停止信号,表示本次通讯结束,从机的选中状态被取消。
SPI 使用 MOSI 及 MISO 信号线来传输数据,使用 SCK 信号线进行数据同步。MOSI 及MISO 数据线在 SCK 的每个时钟周期传输一位数据,且数据输入输出是同时进行的。数据传输时,MSB 先行或 LSB 先行并没有作硬性规定,但要保证两个 SPI 通讯设备之间使用同样的协定,一般都会采用上图所示的 MSB 先行模式。
观察图中的(2)~(5)标号处,MOSI 及 MISO 的数据在 SCK 的上升沿期间变化输出,在SCK 的下降沿时被采样。即在 SCK 的下降沿时刻,MOSI 及 MISO 的数据有效,高电平时表示数据“1”,为低电平时表示数据“0”。在其它时刻,数据无效,MOSI及 MISO 为下一次表示数据做准备。SPI 每次数据传输可以 8 位或 16 位为单位,每次传输的单位数不受限制。
工作模式
SPI 一共有四种通讯模式,它们的主要区别是总线空闲时 SCK 的时钟状态以及数据采样时刻。为方便说明,在此引入“时钟极性 CPOL”和“时钟相位 CPHA”的概念。时钟极性 CPOL 是指 SPI 通讯设备处于空闲状态时,SCK 信号线的电平信号(即 SPI 通讯开始前、 NSS 线为高电平时 SCK 的状态)。CPOL=0 时, SCK 在空闲状态时为低电平,CPOL=1 时,则相反。时钟相位 CPHA 是指数据的采样的时刻,当 CPHA=0 时,MOSI 或 MISO 数据线上的信号将会在 SCK 时钟线的“奇数边沿”被采样。当 CPHA=1 时,数据线在 SCK 的“偶数边沿”采样。
CPHA=0 时的 SPI 通讯模式:
CPHA=1 时的 SPI 通讯模式:
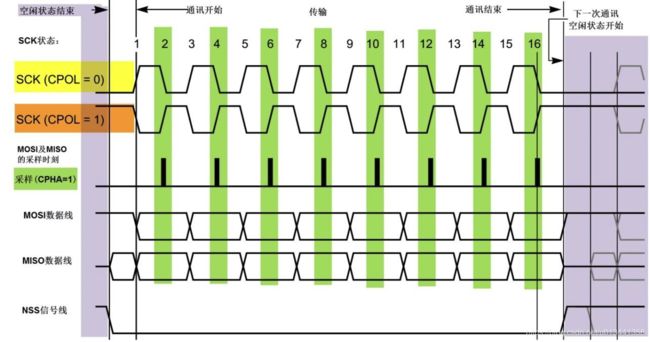
由 CPOL 及 CPHA 的不同状态,SPI 分成了四种模式,如下表所示,主机与从机需要工作在相同的模式下才可以正常通讯,实际中采用较多的是“模式 0”与“模式 3”。
| SPI模式 | CPOL | CPHA | 时钟空闲 | 采样时刻 |
|---|---|---|---|---|
| 0 | 0 | 0 | low | 奇边沿 |
| 1 | 0 | 1 | low | 偶边沿 |
| 2 | 1 | 0 | high | 奇边沿 |
| 3 | 1 | 1 | high | 偶边沿 |
配置流程
GPIO端口功能配置:
void GPIO_Config()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_AFIODeInit();
//SPI-Clock:PA5 SPI-MISO:PA6 SPI-MOSI:PA7
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
SPI外设配置:
void SPI_Config()
{
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_32;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
// SPI_I2S_ITConfig(SPI1, SPI_I2S_IT_RXNE, ENABLE);
// SPI_I2S_ClearFlag(SPI1, SPI_I2S_IT_RXNE | SPI_I2S_IT_TXE);
}
在某处使能SPI:
SPI_Cmd(SPI1, ENABLE);
如果使能了SPI中断,需要在NVIC中配置其中断的主从优先级。
特别注意
硬件SPI写入数据的时候记得读取,不然会一直读出0xFF。因为SPI为双线结构,只要时钟线有信号,两条线上都会有信号,如果只发送数据而不同步读取数据,会造成溢出标志OVR被置1。
Overrun flag (OVR)
This flag is set when data are received and the previous data have not yet been read from SPI_DR. As a result, the incoming data are lost. An interrupt may be generated if the ERRIE bit is set in SPI_CR2.
In this case, the receive buffer contents are not updated with the newly received data from the transmitter device. A read operation to the SPI_DR register returns the previous correctly received data. All other subsequently transmitted half-words are lost.
Clearing the OVR bit is done by a read operation on the SPI_DR register followed by a read access to the SPI_SR register.
使用下面的函数可以通过硬件SPI安全地读写数据:
uint8_t SPI_I2S_ReadWriteData(uint8_t Tdata)
{
while ((SPI1->SR & SPI_I2S_FLAG_TXE) == (uint16_t) RESET)
;
SPI1->DR = Tdata;
while ((SPI1->SR & SPI_I2S_FLAG_RXNE) == (uint16_t) RESET)
;
///注意:接收区满了要及时读出来,否则将不能接收下一个字节数据
return SPI1->DR;
}
参考文献