Visual Studio 2017 双目开发(一)——opencv及PCL配置
Visual Studio 2017 双目开发
Visual Studio 2017 双目开发项目主要包含下面几个方法:
- opencv及PCL配置
- MSRA-OpenPAI介绍及配置
- 调用摄像头及图片分隔
- opencv及流处理分割
- 摄像头畸变矫正及匹配
- 深度图生成及点云
- 待续
opencv介绍及下载
OpenCV的全称是Open Source Computer Vision Library,是一个跨平台的计算机视觉库。OpenCV是由英特尔公司发起并参与开发,以BSD许可证授权发行,可以在商业和研究领域中免费使用。OpenCV可用于开发实时的图像处理、计算机视觉以及模式识别程序。
OpenCV项目最早由英特尔公司于1999年启动,致力于CPU密集型的任务,是一个包括如光线追踪和3D显示的计划的一部分。早期OpenCV的主要目标是:
- 为推进机器视觉的研究,提供一套开源且优化的基础库。不重造轮子。
- 提供一个共同的基础库,使得开发人员的代码更容易阅读和转让,促进了知识的传播。
- 通过提供一个不需要开源或免费的软件许可,促进商业应用软件的开发。
- OpenCV现在也集成了对CUDA的支持.
其现在一般于解决例如增强现实、人脸识别、手势交互、人机交互、动作识别、运动跟踪、舞台识别、图像分割等问题。
下载地址:https://opencv.org/releases.html
(本系列所用的为3.4.1版本)

下载完成后点击安装就好了,这是一个自解压文件,在你配置环境前可以自由复制移动到你想要的任何地方。
PCL介绍及下载

Point Cloud Library是点云处理任务和3D几何处理的开源算法库,例如三维计算机视觉中出现的算法。该库包含用于特征估计,表面重构,3D配准,模型拟合和分割的算法。它是用C ++编写的,并且在BSD许可下发布。
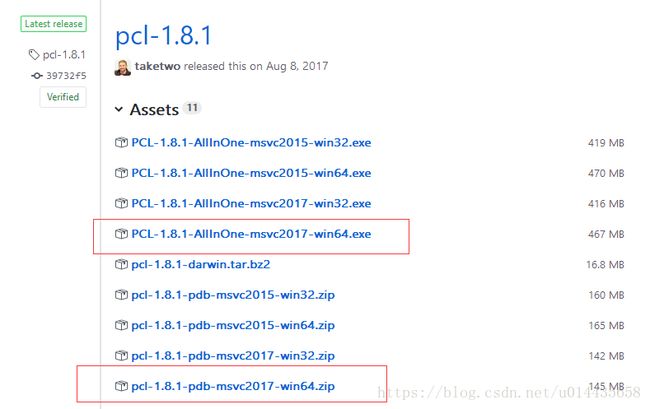
下载地址:https://github.com/PointCloudLibrary/pcl/releases
(本系列所用的为1.8.1版本,请下载AllInOne和pdb两个对应版本的)
之后运行.exe文件进行安装,在安装过程中选择
Add PCL to the system PATH
以自动添加环境变量,省去人工添加的问题。
安装过程中,如果不确定是否不需要其他库,请选点上安装全部组件。
之后安装会弹出OpenNI2的安装窗口,可以一路next,但是请记住其安装路径,这在之后的系统环境配置中会用到。
系统环境变量配置
opencv
在Windows10(本系列默认开发环境为Windows 10 Pro 64-bit)下,点开系统属性,在系统变量中设置path,添加
"your opencv location"\build\x64\vc15\bin /*前面的内容取决于opencv所在路径*/到Windows的环境变量中
PCL
同上的系统变量,添加下面的目录到PATH中
%PCL_ROOT%\bin
%PCL_ROOT%\3rdParty\VTK\bin
%PCL_ROOT%\3rdParty\FLANN\bin
%OPENNI2_REDIST64%
%PCL_ROOT%\3rdParty\Qhull\bin
"your OpenNI location"\Tools /*前面的内容取决于openNI2所在路径*/配置好系统环境变量后,建议重启电脑来应用环境变量(虽然不重启也可以,但是重启会减少某些设备报错的概率)
VS2017 开发环境配置
opencv
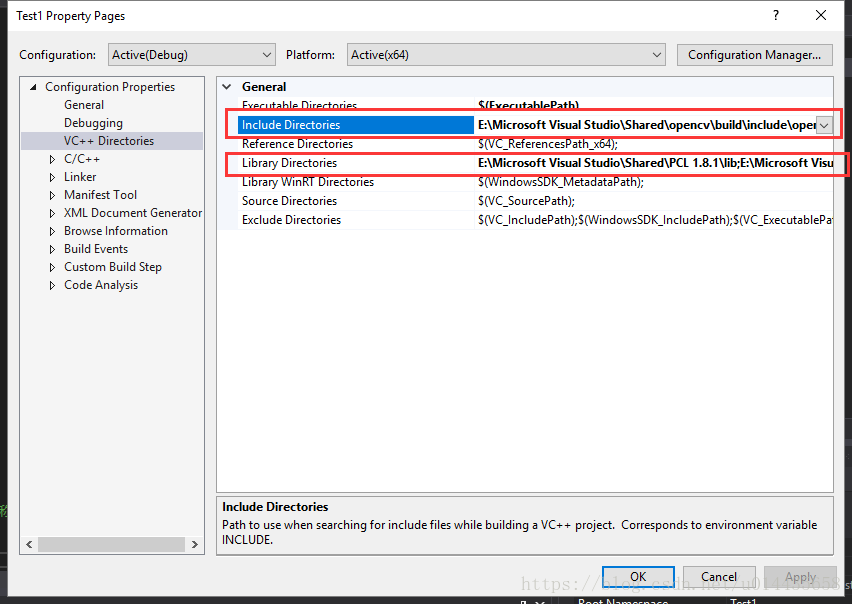
在右侧的解决方案管理器中找到“属性页”(Properties),点开VC++ Directories,将
"your opencv location"\build\include\opencv2
"your opencv location"\build\include\opencv
"your opencv location"\build\include
/*前面的内容取决于opencv所在路径*/添加到 Include Directories中去
再将
"your opencv location"\build\x64\vc15\lib
/*前面的内容取决于opencv所在路径*/添加到Library Directories中去
最后是添加lib库,在右侧的Linker中的Input,编辑Additional Dependencies,使用debug就添加
"your opencv location"\build\x64\vc15\lib\opencv_world341d.lib
/*前面的内容取决于opencv所在路径*/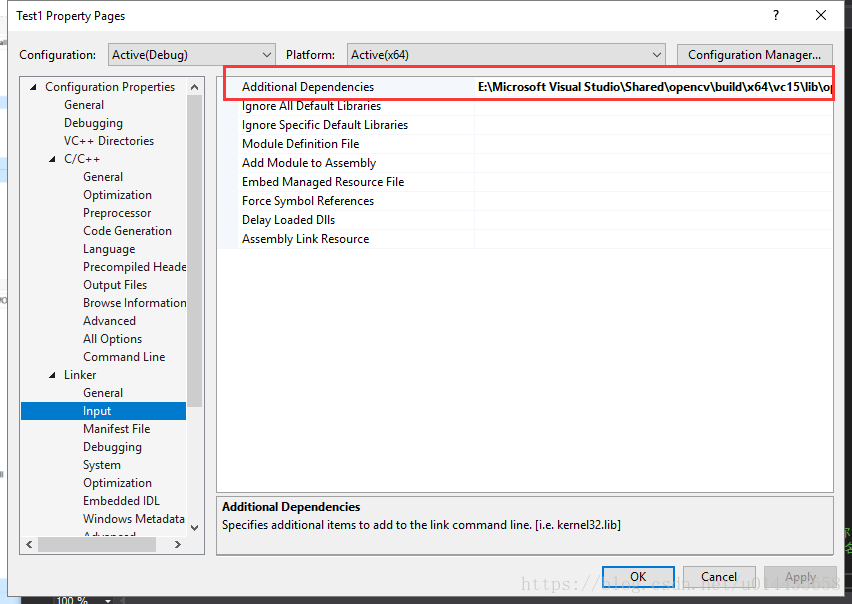
使用release就添加
"your opencv location"\build\x64\vc15\lib\opencv_world341.lib
/*前面的内容取决于opencv所在路径*/最后还需要将“opencv\build\x64\vc15\bin”路径下的三个dll文件拷贝到C:\Windows\System32与C:\Windows\SysWOW64下面,完成动态库的链接
PCL
同opencv,PCL的配置方法也是先打开“属性页”(Properties),这里仅讲解debug模式下的配置方法。
点开VC++ Directories,将
"your OpenNI location"\Include
/*前面的内容取决于OpenNI2所在路径*/
"your PCL location"\include\pcl-1.8
"your PCL location"\3rdParty\VTK\include\vtk-8.0
"your PCL location"\3rdParty\QHull\include
"your PCL location"\3rdParty\FLANN\include
"your PCL location"\3rdParty\Eigen\eigen3
"your PCL location"\3rdParty\Boost\include\boost-1_64
/*前面的内容取决于PCL所在路径*/添加到 Include Directories中去(PS:请注意以上路径末尾数字版本号与你的本地文件是一致的)
再将
"your OpenNI location"\Lib
/*前面的内容取决于OpenNI2所在路径*/
"your PCL location"\lib
"your PCL location"\3rdParty\VTK\lib
"your PCL location"\3rdParty\QHull\lib
"your PCL location"\3rdParty\FLANN\lib
"your PCL location"\3rdParty\Boost\lib
/*前面的内容取决于PCL所在路径*/添加到Library Directories中去
最后是在C/C++下的Preprocessor中的Preprocessor Definitions中添加
_SCL_SECURE_NO_WARNINGS
_CRT_SECURE_NO_WARNINGS
最后是添加lib库,在右侧的Linker中的Input,编辑Additional Dependencies,添加
vtknetcdf_c++-gd.lib
pcl_common_debug.lib
pcl_features_debug.lib
pcl_filters_debug.lib
pcl_io_ply_debug.lib
pcl_io_debug.lib
pcl_kdtree_debug.lib
pcl_keypoints_debug.lib
pcl_ml_debug.lib
pcl_octree_debug.lib
pcl_outofcore_debug.lib
pcl_people_debug.lib
pcl_recognition_debug.lib
pcl_registration_debug.lib
pcl_sample_consensus_debug.lib
pcl_search_debug.lib
pcl_segmentation_debug.lib
pcl_stereo_debug.lib
pcl_surface_debug.lib
pcl_tracking_debug.lib
pcl_visualization_debug.lib
libboost_atomic-vc141-mt-gd-1_64.lib
libboost_bzip2-vc141-mt-gd-1_64.lib
libboost_chrono-vc141-mt-gd-1_64.lib
libboost_container-vc141-mt-gd-1_64.lib
libboost_context-vc141-mt-gd-1_64.lib
libboost_coroutine-vc141-mt-gd-1_64.lib
libboost_date_time-vc141-mt-gd-1_64.lib
libboost_exception-vc141-mt-gd-1_64.lib
libboost_fiber-vc141-mt-gd-1_64.lib
libboost_filesystem-vc141-mt-gd-1_64.lib
libboost_graph-vc141-mt-gd-1_64.lib
libboost_graph_parallel-vc141-mt-gd-1_64.lib
libboost_iostreams-vc141-mt-gd-1_64.lib
libboost_locale-vc141-mt-gd-1_64.lib
libboost_log-vc141-mt-gd-1_64.lib
libboost_log_setup-vc141-mt-gd-1_64.lib
libboost_math_c99-vc141-mt-gd-1_64.lib
libboost_math_c99f-vc141-mt-gd-1_64.lib
libboost_math_c99l-vc141-mt-gd-1_64.lib
libboost_math_tr1-vc141-mt-gd-1_64.lib
libboost_math_tr1f-vc141-mt-gd-1_64.lib
libboost_math_tr1l-vc141-mt-gd-1_64.lib
libboost_mpi-vc141-mt-gd-1_64.lib
libboost_numpy3-vc141-mt-gd-1_64.lib
libboost_numpy-vc141-mt-gd-1_64.lib
libboost_prg_exec_monitor-vc141-mt-gd-1_64.lib
libboost_program_options-vc141-mt-gd-1_64.lib
libboost_python3-vc141-mt-gd-1_64.lib
libboost_python-vc141-mt-gd-1_64.lib
libboost_random-vc141-mt-gd-1_64.lib
libboost_regex-vc141-mt-gd-1_64.lib
libboost_serialization-vc141-mt-gd-1_64.lib
libboost_signals-vc141-mt-gd-1_64.lib
libboost_system-vc141-mt-gd-1_64.lib
libboost_test_exec_monitor-vc141-mt-gd-1_64.lib
libboost_thread-vc141-mt-gd-1_64.lib
libboost_timer-vc141-mt-gd-1_64.lib
libboost_type_erasure-vc141-mt-gd-1_64.lib
libboost_unit_test_framework-vc141-mt-gd-1_64.lib
libboost_wave-vc141-mt-gd-1_64.lib
libboost_wserialization-vc141-mt-gd-1_64.lib
libboost_zlib-vc141-mt-gd-1_64.lib
flann-gd.lib
flann_cpp-gd.lib
flann_cpp_s-gd.lib
flann_s-gd.lib
qhull_d.lib
qhullcpp_d.lib
qhullstatic_d.lib
qhullstatic_r_d.lib
qhull_p_d.lib
qhull_r_d.lib
vtkalglib-8.0-gd.lib
vtkChartsCore-8.0-gd.lib
vtkCommonColor-8.0-gd.lib
vtkCommonComputationalGeometry-8.0-gd.lib
vtkCommonCore-8.0-gd.lib
vtkCommonDataModel-8.0-gd.lib
vtkCommonExecutionModel-8.0-gd.lib
vtkCommonMath-8.0-gd.lib
vtkCommonMisc-8.0-gd.lib
vtkCommonSystem-8.0-gd.lib
vtkCommonTransforms-8.0-gd.lib
vtkDICOMParser-8.0-gd.lib
vtkDomainsChemistry-8.0-gd.lib
vtkexoIIc-8.0-gd.lib
vtkexpat-8.0-gd.lib
vtkFiltersAMR-8.0-gd.lib
vtkFiltersCore-8.0-gd.lib
vtkFiltersExtraction-8.0-gd.lib
vtkFiltersFlowPaths-8.0-gd.lib
vtkFiltersGeneral-8.0-gd.lib
vtkFiltersGeneric-8.0-gd.lib
vtkFiltersGeometry-8.0-gd.lib
vtkFiltersHybrid-8.0-gd.lib
vtkFiltersHyperTree-8.0-gd.lib
vtkFiltersImaging-8.0-gd.lib
vtkFiltersModeling-8.0-gd.lib
vtkFiltersParallel-8.0-gd.lib
vtkFiltersParallelImaging-8.0-gd.lib
vtkFiltersPoints-8.0-gd.lib
vtkFiltersProgrammable-8.0-gd.lib
vtkFiltersSelection-8.0-gd.lib
vtkFiltersSMP-8.0-gd.lib
vtkFiltersSources-8.0-gd.lib
vtkFiltersStatistics-8.0-gd.lib
vtkFiltersTexture-8.0-gd.lib
vtkFiltersTopology-8.0-gd.lib
vtkFiltersVerdict-8.0-gd.lib
vtkfreetype-8.0-gd.lib
vtkGeovisCore-8.0-gd.lib
vtkgl2ps-8.0-gd.lib
vtkhdf5-8.0-gd.lib
vtkhdf5_hl-8.0-gd.lib
vtkImagingColor-8.0-gd.lib
vtkImagingCore-8.0-gd.lib
vtkImagingFourier-8.0-gd.lib
vtkImagingGeneral-8.0-gd.lib
vtkImagingHybrid-8.0-gd.lib
vtkImagingMath-8.0-gd.lib
vtkImagingMorphological-8.0-gd.lib
vtkImagingSources-8.0-gd.lib
vtkImagingStatistics-8.0-gd.lib
vtkImagingStencil-8.0-gd.lib
vtkInfovisCore-8.0-gd.lib
vtkInfovisLayout-8.0-gd.lib
vtkInteractionImage-8.0-gd.lib
vtkInteractionStyle-8.0-gd.lib
vtkInteractionWidgets-8.0-gd.lib
vtkIOAMR-8.0-gd.lib
vtkIOCore-8.0-gd.lib
vtkIOEnSight-8.0-gd.lib
vtkIOExodus-8.0-gd.lib
vtkIOExport-8.0-gd.lib
vtkIOExportOpenGL-8.0-gd.lib
vtkIOGeometry-8.0-gd.lib
vtkIOImage-8.0-gd.lib
vtkIOImport-8.0-gd.lib
vtkIOInfovis-8.0-gd.lib
vtkIOLegacy-8.0-gd.lib
vtkIOLSDyna-8.0-gd.lib
vtkIOMINC-8.0-gd.lib
vtkIOMovie-8.0-gd.lib
vtkIONetCDF-8.0-gd.lib
vtkIOParallel-8.0-gd.lib
vtkIOParallelXML-8.0-gd.lib
vtkIOPLY-8.0-gd.lib
vtkIOSQL-8.0-gd.lib
vtkIOTecplotTable-8.0-gd.lib
vtkIOVideo-8.0-gd.lib
vtkIOXML-8.0-gd.lib
vtkIOXMLParser-8.0-gd.lib
vtkjpeg-8.0-gd.lib
vtkjsoncpp-8.0-gd.lib
vtklibharu-8.0-gd.lib
vtklibxml2-8.0-gd.lib
vtklz4-8.0-gd.lib
vtkmetaio-8.0-gd.lib
vtkNetCDF-8.0-gd.lib
vtkoggtheora-8.0-gd.lib
vtkParallelCore-8.0-gd.lib
vtkpng-8.0-gd.lib
vtkproj4-8.0-gd.lib
vtkRenderingAnnotation-8.0-gd.lib
vtkRenderingContext2D-8.0-gd.lib
vtkRenderingContextOpenGL-8.0-gd.lib
vtkRenderingCore-8.0-gd.lib
vtkRenderingFreeType-8.0-gd.lib
vtkRenderingGL2PS-8.0-gd.lib
vtkRenderingImage-8.0-gd.lib
vtkRenderingLabel-8.0-gd.lib
vtkRenderingLIC-8.0-gd.lib
vtkRenderingLOD-8.0-gd.lib
vtkRenderingOpenGL-8.0-gd.lib
vtkRenderingVolume-8.0-gd.lib
vtkRenderingVolumeOpenGL-8.0-gd.lib
vtksqlite-8.0-gd.lib
vtksys-8.0-gd.lib
vtktiff-8.0-gd.lib
vtkverdict-8.0-gd.lib
vtkViewsContext2D-8.0-gd.lib
vtkViewsCore-8.0-gd.lib
vtkViewsInfovis-8.0-gd.lib
vtkzlib-8.0-gd.lib
opengl32.lib环境验证
opencv
opencv下可以用简单的图片显示来验证,用imshow来显示,笔者写的示例代码如下(去掉注释)
//#includePCL
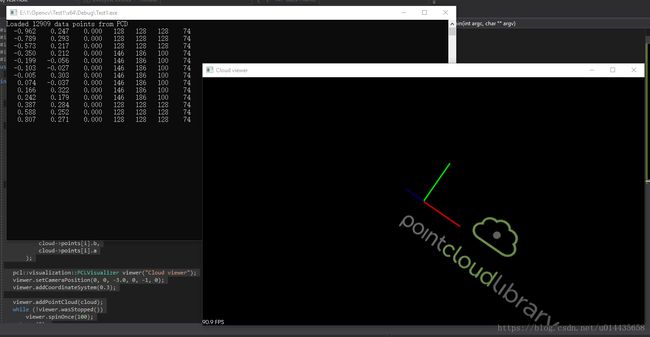
PCL也可以通过pcl的github上面的各种库进行显示,用cloud viewer 来显示,笔者写的示例代码如下(去掉注释)
#include
#include
#include
#include
#include
using namespace std;
int main(int argc, char** argv) {
typedef pcl::PointXYZRGBA PointT;
pcl::PointCloud::Ptr cloud(new pcl::PointCloud);
std::string dir = "E:\\GitHub\\pcl\\test\\";
std::string filename = "pcl_logo.pcd";
if (pcl::io::loadPCDFile((dir + filename), *cloud) == -1) {
//* load the file
PCL_ERROR("Couldn't read PCD file \n");
return (-1);
}
printf("Loaded %d data points from PCD\n",
cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); i += 1000)
printf("%8.3f %8.3f %8.3f %5d %5d %5d %5d\n",
cloud->points[i].x,
cloud->points[i].y,
cloud->points[i].z,
cloud->points[i].r,
cloud->points[i].g,
cloud->points[i].b,
cloud->points[i].a
);
pcl::visualization::PCLVisualizer viewer("Cloud viewer");
viewer.setCameraPosition(0, 0, -3.0, 0, -1, 0);
viewer.addCoordinateSystem(0.3);
viewer.addPointCloud(cloud);
while (!viewer.wasStopped())
viewer.spinOnce(100);
return (0);
} 
引用
1 opencv介绍:https://en.wikipedia.org/wiki/OpenCV
2 PCL介绍:https://en.wikipedia.org/wiki/Point_Cloud_Library
3 PCL环境配置:http://gyshgx868.github.io/2018/03/06/PointCloud/pcl-install/
4 opencv环境配置:https://my.oschina.net/u/3800567/blog/1792040