基于多源传感器融合的导航定位综述方法分析
一、多源传感器融合可以怎么分类
传感器融合根绝传感器种类和功能融合方法甚多,主要以导航和图像中的融合展开叙述。
1、多源导航定位,根据结构特性可分为三类:集中式融合算法,并行式融合算法,序贯式融合算法,多传感器导航目的,导航系统的精度,可靠性,鲁棒性,更高效。
目前的算法,其中比较常用的融合算法有,集中式卡尔曼滤波,动静态滤波,联邦滤波,自适应抗差融合滤波,人工神经网络,因子图的融合算法。

2、多源传感器融合,根据方法可以分为两类:概率统计方法和神经网络方法
概率统计方法:估计理论,卡尔曼滤波,假设检验,贝叶斯方法,统计决策理论以及其他变形方法。
神经网络因为在此方面的应用不成熟,所以没有形成比较经典的方法,基本都是个人根绝具体情况进行定义,比如BP神经网络,RBF神经网络,人工神经网络
1)RBF神经网络
RBF神将网络是一种三层神经网络,其包括输入层、隐层、输出层。从输入空间到隐层空间的变换是非线性的,而从隐层空间到输出层空间变换是线性的。
2)BP神经网络
BP(Back Propagation)神经网络的学习过程由信号的正向传播与误差的反向传播两个过程组成。(BP网络就不细说了,网上资料非常多)
3)RBF和BP神经网络的区别
BP神经网络的隐节点采用输入模式与权向量的内积作为激活函数的自变量,而激活函数采用Sigmoid函数。各调参数对BP网络的输出具有同等地位的影响,因此BP神经网络是对非线性映射的全局逼近。
RBF神经网络的隐节点采用输入模式与中心向量的距离(如欧式距离)作为函数的自变量,并使用径向基函数(如Gaussian函数)作为激活函数。神经元的输入离径向基函数中心越远,神经元的激活程度就越低(高斯函数)。RBF网络的输出与部分调参数有关,譬如,一个wij值只影响一个yi的输出(参考上面第二章网络输出),RBF神经网络因此具有“局部映射”特性
BP神经网络可以有多个隐含层,但是RBF只有一个隐含层。
RBF的训练速度比较快,BP神经网络的训练速度比较慢。
3、针对于图像的异源传感器融合方法
基于空间域和变换域的两类异源图像融合算法、自动加权融合算法、灰度极值法、模糊神经网络、小波变换融合法、Contourlet融合法、NSCT-PCNN融合法
主成分分析,深度神经网络方法等(此处主要针对生命搜寻中红外图像的融合,主要用来提取特征,初步方法为用神经网络进行人体检测,方法与彩色图像类似,主要解决夜间和能见度低下情况下的生命搜索问题)
自动加权融合算法,保持了现有的加权平均融合法的快速实用性,通过主成分分析,将源图像中的有用信息集中到相互独立的新主成分矩阵中,由此确定加权平均融合方法中源图像的加权系数,以实现更加理想的融合效果。(K-L变换的自动加权融合算法)
二、根据结构分类的多源传感器融合
1、集中式融合算法
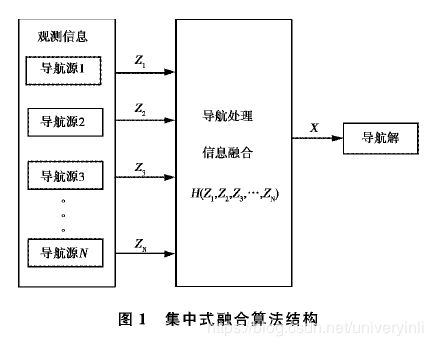
将时空配准后的观测信息Z1、Z2、Z3、Z4集中进行融合H,然后得到导航解,集中式卡尔曼滤波包括扩展卡尔曼滤波,无迹卡尔曼滤波,粒子滤波等滤波
缺点,是算法易发散、容错性差,优点,解决了非线性的值估计问题和非高斯的噪声问题
1.1集中式卡尔曼滤波
根据最小均方误差进行系统估计是传统的卡尔曼滤波算法,包括卡尔曼滤波的扩展,扩展卡尔曼滤波,无迹卡尔曼滤波,粒子滤波等滤波
优点,可以减小观测值的观测误差和系统误差,缺点,状态噪声和观测噪声都为高斯噪声,且观测方程必须为线性控制系统
1.2 自适应卡尔曼滤波
双重卡尔曼滤波,基于新息的自适应估计方法,多模型自适应估计方法
缺点,随着观测矩阵维数的增加,系统运算量急剧增大,融合效率下降等问题。
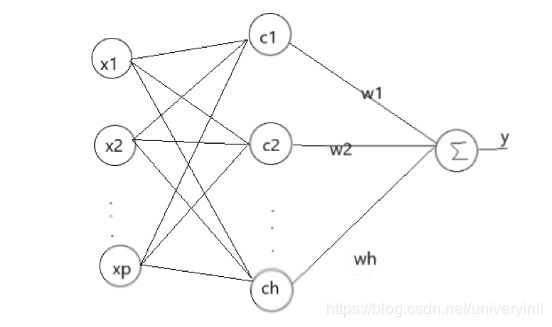
1.3 人工神经网络
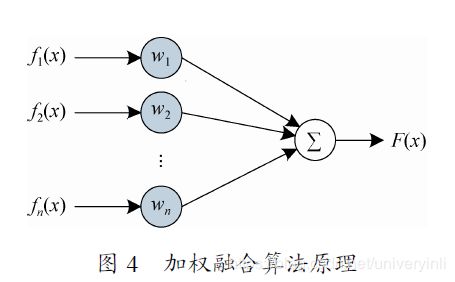
输入导航源信息,输出融合后的导航解,其中加权算法是神经网络的一个特殊应用,加权算法是一种最简单直观的融合算法。在加权融合算法中,将多个融合源提供的位置信息分别冠以相应的权重,从而获取最后的融合结果,所有传感器的权重和为1,缺点是当权重因子选取不当的时候,并不能获得最佳的融合效果。
优点,具有较强的容错性和自学习、自适应能力,适应于非线性系统,缺点,需要事前进行大量的训练,运算量大且实时性难以保证,多用于事后解算
2、并行式融合算法
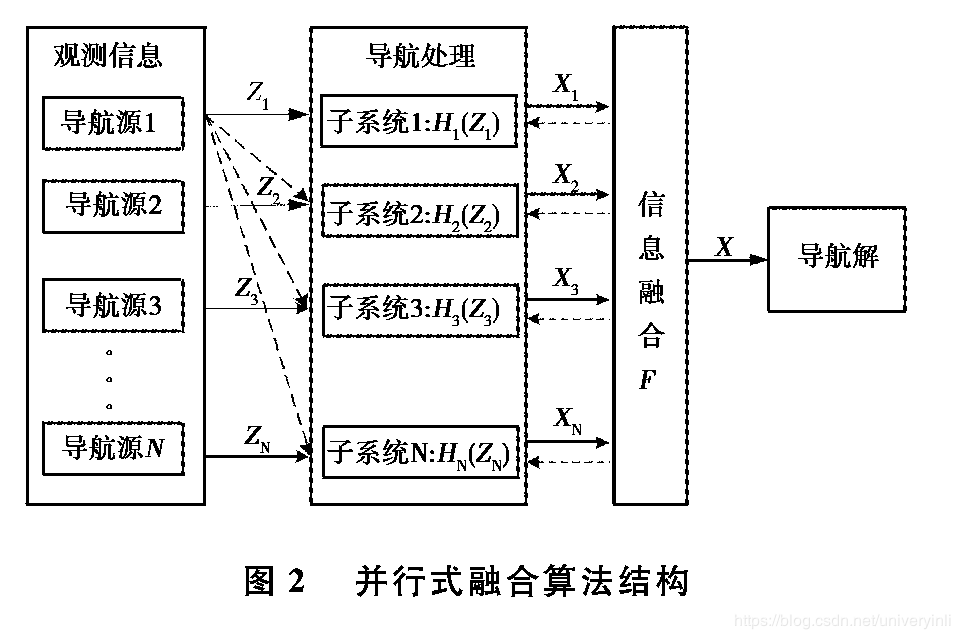
为了解决集中式算法计算效率低的问题,进行信息融合之前,导航源先各自或者两两组合后在融合子系统中进行并行的导航处理H,然后将各个子系统输出的局部导航解X,最后进行输出融合导航解X。
2.1 联邦滤波
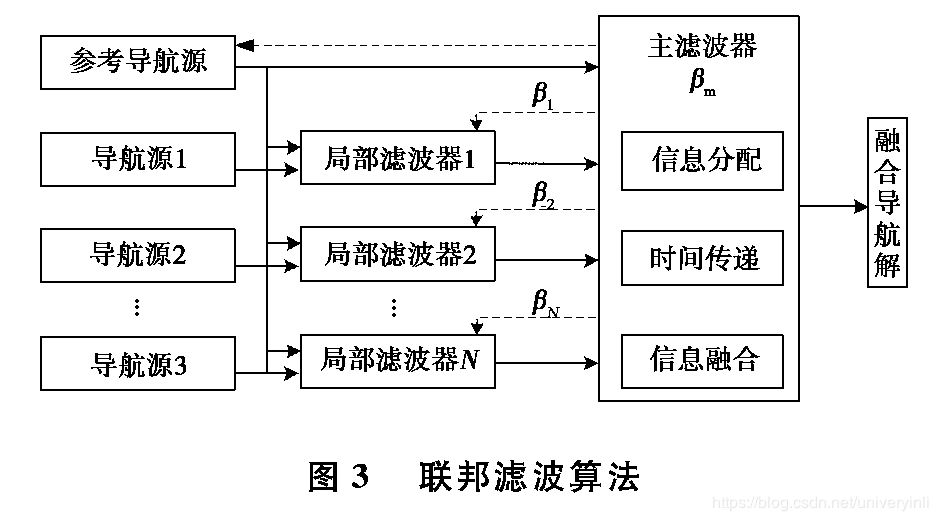
在各个导航源中选择一个信息全面、输出速率高、可靠性有保证的导航源作为参考导航源,与其他导航源两两组合,进行局部滤波,再将各个局部滤波解与主滤波按信息分享原理进行融合,联邦滤波中各个滤波器不相互独立,都依赖参考导航源进行融合。
优点,实时性强,系统负荷少等优点,缺点,联邦滤波中各局部滤波器采用了相同的参考,导致各个滤波器输出量之间不独立,尤其不具有严格性和最优性,一旦参考导航源出现异常,将影响每个滤波器的性能,容错性较差。
2.2 自适应抗差融合滤波

先对各个导航源观测信息实施抗差解算,提高系统的容错能力,然后基于抗差解算提供较可靠的状态初值,再对状态方程进行自适应因子调节
优点,容错性强很大程度上提高了系统的容错性,且子系统不相关,缺点,需要导航源在同一时刻产生多个观测值,否则无法进行计算
3、序贯式融合算法(类似神经网络中的序贯式模型)
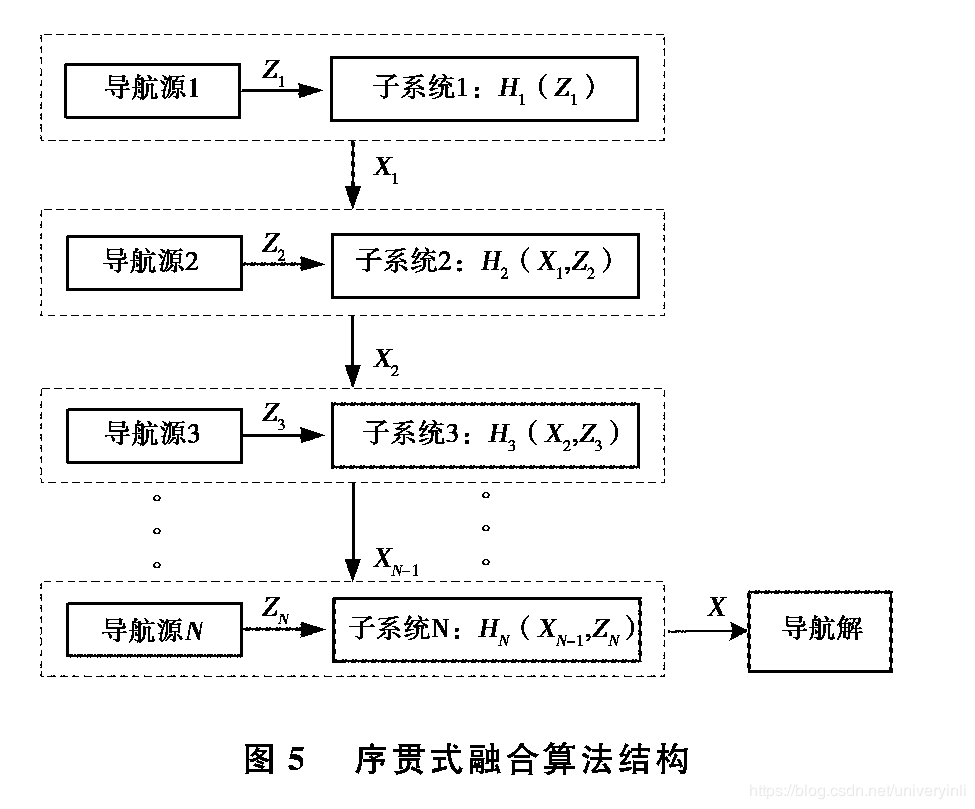
为了解决异步异构导航源的信息融合和联邦滤波中各滤波器之间不独立的问题,学者们提出采用序贯式算法来进行融合导航,算法首先将各导航源按照一定的顺序进行排列,然后依次将其观测信息Z输入至融合子系统,逐个进行导航解算H,最后一个融合子系统的输出即位融合结果X。(该方法其实是决策级别的传感器融合,一般情况下异源融合尽量采用决策级别融合)
优点,各个导航源的观测量和子系统之间是完全独立的,没有相关性,能够实现最优融合,缺点,导航源信息逐次累计,不利于完好性监测和基于因子图的融合算法。
3.1 动、静态滤波
第一个观测历元,基于动力学模型信息和第一个导航源的观测信息进行动态滤波,然后依次加入各个导航源的观测信息来进行静态滤波,最终得到全部导航源的融合解。
缺点,导航源信息逐次融合,向下传递,容易造成误差累积,不利于完好检测和故障隔离
3.2 基于因子图的融合算法
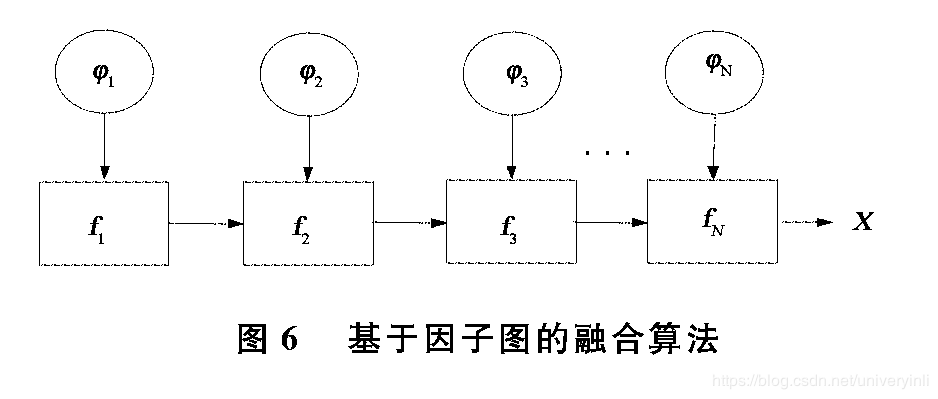
此方法提出代替扩展卡尔曼滤波,通过变量信息的累计,然后进行局部融合,最后输出融合结果。
优点,可以处理异步异构导航源的信息,缺点,存在误差向下累计的问题。
三、多源融合导航的性能评估
一般来说,信息融合的性能评估体系主要包括五类指标,分别是完整性、正确性、通用性、连续性和及时性
而在多源融合导航中,由于导航系统的独特性,定位精度成为性能评估的首要指标,也是导航服务评价体系中最直观的体现;同时多源融合导航还要兼具完好性、
连续性、可靠性以及鲁棒性等性能。除此以外还有即插即用性质也是比较重要的,应该将传感器融合系统设计成一个适配器系统,同时,可以利用蒙特卡洛方法进行实验统计。