前言:建立一个简单的urdf模型
详解请参看教程http://wiki.ros.org/urdf/Tutorials/Building%20a%20Visual%20Robot%20Model%20with%20URDF%20from%20Scratch
教程写的非常好,这里只做最终版解析部分。
查看是否安装了joint_state_publisher功能包:
rospack find joint_state_publisher
一、基本模型
1.1 新建urdf_tutorial功能包
1.2 新建urdf文件
新建01-myfirst.urdf文件


xml version="1.0"?>
<robot name="materials">
<material name="blue">
<color rgba="0 0 0.8 1"/>
material>
<material name="white">
<color rgba="1 1 1 1"/>
material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
geometry>
<material name="blue"/>
visual>
link>
<link name="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
visual>
link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
<origin xyz="0 -0.22 0.25"/>
joint>
<link name="left_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
visual>
link>
<joint name="base_to_left_leg" type="fixed">
<parent link="base_link"/>
<child link="left_leg"/>
<origin xyz="0 0.22 0.25"/>
joint>
robot>
----------------------------------------------------------------------------------------------------------------------------
代码解释:
<robot name="materials">此文件的机器人名称 <material name="blue">定义材料属性名称为蓝色 <color rgba="0 0 0.8 1"/>材料属性为rgba值 material> <link name="base_link">定义基本连杆 <visual>可视化属性 <geometry>几何形状 <cylinder length="0.6" radius="0.2"/>圆柱,半径0.2米,高0.6米 geometry> <material name="blue"/>材料属性引用为蓝色 visual> link> <link name="right_leg">定义右腿连杆 <visual> <geometry> <box size="0.6 0.1 0.2"/>盒状,长宽高为0.6米,0.1米,0.2米 geometry> <origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>位置,位于关节点base_to_right_legz轴负方向0.3米,绕y轴旋转90°=π/2=1.57075 <material name="white"/> visual> <joint name="base_to_right_leg" type="fixed">定义基本连杆和右腿之间的关节,属性为固定。其实就是新建了一个相对坐标系。 <parent link="base_link"/>父连杆为base_link <child link="right_leg"/>子连杆为right_leg <origin xyz="0 -0.22 0.25"/>关节位置,位于父连杆关节y轴负方向0.22米,z轴正方向0.25米 joint>
----------------------------------------------------------------------------------------------------------------------------
1.3 新建launch文件
<launch> <arg name="model" default="$(find urdf_tutorial)/urdf/01-myfirst.urdf"/> <arg name="gui" default="true" /> <arg name="rvizconfig" default="$(find urdf_tutorial)/rviz/urdf.rviz" /> <param name="robot_description" command="$(find xacro)/xacro --inorder $(arg model)" /> <param name="use_gui" value="$(arg gui)"/> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /> <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" /> <node name="rviz" pkg="rviz" type="rviz" args="-d $(arg rvizconfig)" required="true" /> launch>
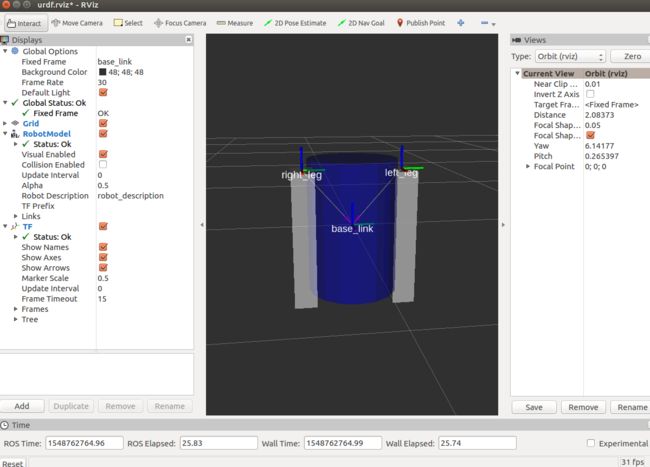
1.4 查看模型
roslaunch urdf_tutorial display.launch
二、进阶模型
2.1 修改urdf文件
xml version="1.0"?>
<robot name="visual">
<material name="blue">
<color rgba="0 0 0.8 1"/>
material>
<material name="black">
<color rgba="0 0 0 1"/>
material>
<material name="white">
<color rgba="1 1 1 1"/>
material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
geometry>
<material name="blue"/>
visual>
link>
<link name="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
visual>
link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
<origin xyz="0 -0.22 0.25"/>
joint>
<link name="right_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
geometry>
<material name="white"/>
visual>
link>
<joint name="right_base_joint" type="fixed">
<parent link="right_leg"/>
<child link="right_base"/>
<origin xyz="0 0 -0.6"/>
joint>
<link name="right_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
geometry>
<material name="black"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
visual>
link>
<joint name="right_front_wheel_joint" type="fixed">
<parent link="right_base"/>
<child link="right_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
joint>
<link name="right_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
geometry>
<material name="black"/>
visual>
link>
<joint name="right_back_wheel_joint" type="fixed">
<parent link="right_base"/>
<child link="right_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
joint>
<link name="left_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
visual>
link>
<joint name="base_to_left_leg" type="fixed">
<parent link="base_link"/>
<child link="left_leg"/>
<origin xyz="0 0.22 0.25"/>
joint>
<link name="left_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
geometry>
<material name="white"/>
visual>
link>
<joint name="left_base_joint" type="fixed">
<parent link="left_leg"/>
<child link="left_base"/>
<origin xyz="0 0 -0.6"/>
joint>
<link name="left_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
geometry>
<material name="black"/>
visual>
link>
<joint name="left_front_wheel_joint" type="fixed">
<parent link="left_base"/>
<child link="left_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
joint>
<link name="left_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
geometry>
<material name="black"/>
visual>
link>
<joint name="left_back_wheel_joint" type="fixed">
<parent link="left_base"/>
<child link="left_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
joint>
<joint name="gripper_extension" type="fixed">
<parent link="base_link"/>
<child link="gripper_pole"/>
<origin rpy="0 0 0" xyz="0.19 0 0.2"/>
joint>
<link name="gripper_pole">
<visual>
<geometry>
<cylinder length="0.2" radius="0.01"/>
geometry>
<origin rpy="0 1.57075 0 " xyz="0.1 0 0"/>
visual>
link>
<joint name="left_gripper_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.2 0.01 0"/>
<parent link="gripper_pole"/>
<child link="left_gripper"/>
joint>
<link name="left_gripper">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
geometry>
visual>
link>
<joint name="left_tip_joint" type="fixed">
<parent link="left_gripper"/>
<child link="left_tip"/>
joint>
<link name="left_tip">
<visual>
<origin rpy="0.0 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
geometry>
visual>
link>
<joint name="right_gripper_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.2 -0.01 0"/>
<parent link="gripper_pole"/>
<child link="right_gripper"/>
joint>
<link name="right_gripper">
<visual>
<origin rpy="-3.1415 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
geometry>
visual>
link>
<joint name="right_tip_joint" type="fixed">
<parent link="right_gripper"/>
<child link="right_tip"/>
joint>
<link name="right_tip">
<visual>
<origin rpy="-3.1415 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
geometry>
visual>
link>
<link name="head">
<visual>
<geometry>
<sphere radius="0.2"/>
geometry>
<material name="white"/>
visual>
link>
<joint name="head_swivel" type="fixed">
<parent link="base_link"/>
<child link="head"/>
<origin xyz="0 0 0.3"/>
joint>
<link name="box">
<visual>
<geometry>
<box size="0.08 0.08 0.08"/>
geometry>
<material name="blue"/>
visual>
link>
<joint name="tobox" type="fixed">
<parent link="head"/>
<child link="box"/>
<origin xyz="0.1814 0 0.1414"/>
joint>
robot>
--------------------------------------------------------------------------
部分代码解释:
<geometry > <mesh filename = “package://urdf_tutorial/meshes/l_finger.dae” /> 几何形状可以引用外部dae文件 geometry>
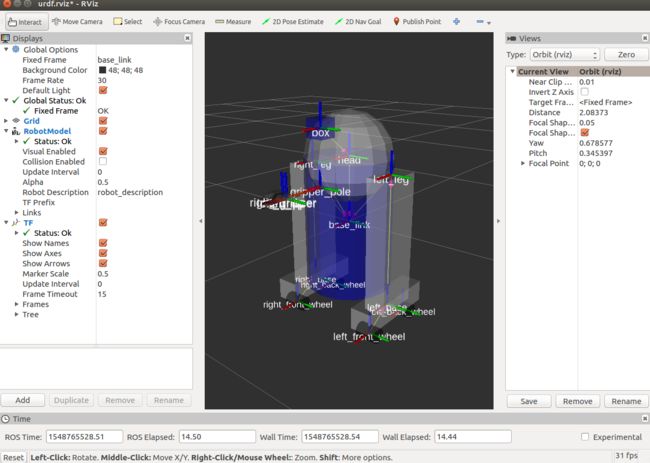
2.2 运行launch文件
-END-