12- OpenCV+TensorFlow 入门人工智能图像处理-磨皮美白
磨皮美白
上节课的+固定值,我们还可以变为乘以一个系数。
for i in range(0,height):
for j in range(0,width):
(b,g,r) = img[i,j]
bb = int(b*1.3)+10
gg = int(g*1.2)+15
if bb>255:
bb = 255
if gg>255:
gg = 255
只修改b和g的值,然后分别加上系数。
# p = p+40
# 改进: p = p*1.2+40
# g+r P*piexl = new
import cv2
import numpy as np
img = cv2.imread('image0.jpg',1)
imgInfo = img.shape
height = imgInfo[0]
width = imgInfo[1]
cv2.imshow('src',img)
dst = np.zeros((height,width,3),np.uint8)
for i in range(0,height):
for j in range(0,width):
(b,g,r) = img[i,j]
bb = int(b*1.3)+10
gg = int(g*1.2)+15
if bb>255:
bb = 255
if gg>255:
gg = 255
dst[i,j] = (bb,gg,r)
cv2.imshow('dst',dst)
cv2.waitKey(0)

mark
可以看到这次就没有蒙上白色
磨皮美白(双边滤波)
# 双边滤波
import cv2
img = cv2.imread('1.jpg',1)
cv2.imshow('src',img)
# 双边滤波过滤器: 到时候讲解
dst = cv2.bilateralFilter(img,15,35,35)
cv2.imshow('dst',dst)
cv2.waitKey(0)
mark
可以看到已经有很大效果了
高斯均值滤波
高斯滤波使用opencv api形式。均值滤波使用源码
滤波与我们的边缘检测有点类似,就是用一个滤波核与我们的图像进行卷积运算。
高斯滤波,既然要进行滤波说明原来图片有问题。
import cv2
import numpy as np
img = cv2.imread('image11.jpg',1)
cv2.imshow('src',img)
# 这些参数在讲解高斯核时介绍
dst = cv2.GaussianBlur(img,(5,5),1.5)
cv2.imshow('dst',dst)
cv2.waitKey(0)
mark
可以看到原图片中有很多小点,这些点都是一些椒盐噪声。
去除这些点,使用高斯滤波
基本上没有模糊的点了,但是图片相比较于原图变模糊了。
均值滤波
定义一个6*6的模板,它里面的值全为1.
使用这个全为1的数据,乘以一个(6,6) 矩阵中所有的图像数据,乘完之后除以36得到均值,将这个均值替换到中心的这个元素。实现均值滤波。
# 均值 6*6 1 。 * 【6*6】/36 = mean -》P
import cv2
import numpy as np
# 读取带噪声的图片
img = cv2.imread('image11.jpg',1)
cv2.imshow('src',img)
imgInfo = img.shape
height = imgInfo[0]
width = imgInfo[1]
# 目标图片
dst = np.zeros((height,width,3),np.uint8)
# 遍历所有点。(6,6)
for i in range(3,height-3):
for j in range(3,width-3):
# 统计模板中6,6的矩阵元素和。
sum_b = int(0)
sum_g = int(0)
sum_r = int(0)
# (6,6)
for m in range(-3,3): # -3 -2 -1 0 1 2 共6个值
for n in range(-3,3):
# 读取6,6这个小块中的每一个数据累加
(b,g,r) = img[i+m,j+n]
sum_b = sum_b+int(b)
sum_g = sum_g+int(g)
sum_r = sum_r+int(r)
# bgr 获取均值
b = np.uint8(sum_b/36)
g = np.uint8(sum_g/36)
r = np.uint8(sum_r/36)
dst[i,j] = (b,g,r)
cv2.imshow('dst',dst)
cv2.waitKey(0)
这跟毛玻璃搞得是一回事啊。
mark
中值滤波
# 中值滤波 取中间值代替原来像素值过程
# 3*3模板 九个像素进行排序,排序之后中间值替换原来像素值
import cv2
import numpy as np
# 读取噪声图片
img = cv2.imread('image11.jpg',1)
imgInfo = img.shape
height = imgInfo[0]
width = imgInfo[1]
# 灰度化
img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
cv2.imshow('src',img)
# 最终生成结果
dst = np.zeros((height,width,3),np.uint8)
# 数组,这九个元素。大小为9
collect = np.zeros(9,np.uint8)
# 两层for循环遍历每一个点
for i in range(1,height-1):
for j in range(1,width-1):
# 描述即将装取数据的下标
k = 0
# (3,3) 从-1开始到2
for m in range(-1,2): # -1 0 1
for n in range(-1,2):
# 获取当前灰度值
gray = img[i+m,j+n]
# 下标就是我们的k
collect[k] = gray
k = k+1
# 0 1 2 3 4 5 6 7 8
# 1
# 拿一个元素和其他元素进行比较
# 如果这个元素最大或者最小都放到最后面
# 完成大小排序
for k in range(0,9):
# 第一个元素
p1 = collect[k]
for t in range(k+1,9):
# 如果p1小于比较值
if p1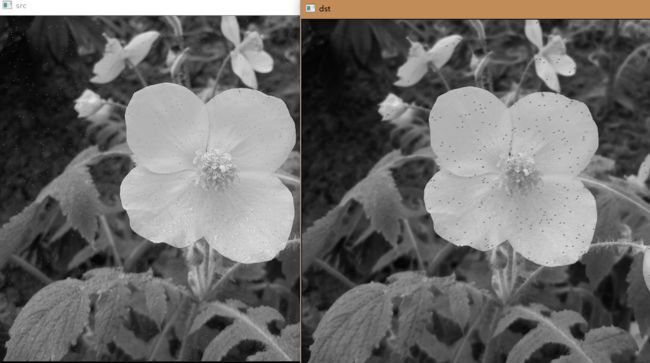
mark
把旁边的去掉了,反倒本来没啥麻子的全是麻子
总结
图片美化
- 直方图 & 直方图均衡化 & 亮度增强
- 磨皮美白 & 图片滤波 & 高斯滤波
重点复习,直方图均匀化和图像滤波的相关知识
- 直方图: 本质统计每个像素灰度出现的概率 x: 0 - 255 p(0-1)
- 在原有基础上将概率离散化
- 统计每个颜色出现的概率
- 累计概率 最后的几个概率接近1
- 根据累计概率,进行0-255映射表的创建
公式: newp = 255 * p
- 计算新的像素值。
YUV方式不改变颜色。
我们的滤波核就是通过高斯滤波函数来生成的。
滤波的本质是

mark
用当前窗口中的像素点与我们的滤波核进行相乘。
实质; 矩阵对应点相乘并求和
左侧是图片,右侧是我们的高斯滤波核。
我们想计算中心点新的像素。就用(3,3)图像乘以(3,3)的滤波核
7*1
4*2
1*1
完成9个像素的对应相乘,完成之后再乘以1/16
为什么是16,因为我们滤波核中所有数加起来是16.平均。
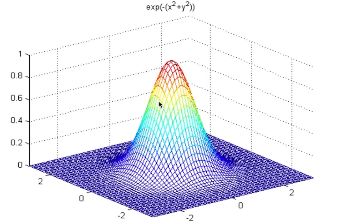
滤波核的特点,越往中间值越大。

mark
mark
这也是二维高斯的特点。
双边滤波实际是由一个高斯核和r距离核组成。
api实现。
g + r 两者加权形成一个共同的核。
当前这个核p 乘以像素 与像素进行卷积可以得到新的像素。
像素乘以滤波核。像素与滤波核的乘法就是我们的卷积运算。