信号与系统笔记
信号与系统笔记
文章目录
- 信号与系统笔记
- @[toc]
- 序列
- 序列的表示5e 4
- 序列的变换
- 序列运算
- 几个较为重要的序列
- 单位脉冲序列
- 单位阶跃序列
- 矩形序列
- DTFT(Discrete-time Fourier Transform)
- 定义
- 性质
- Z变换
- 定义
- 性质
- 系统
- 系统的特性
- 系统的表示
- 已知未完善地方
文章目录
- 信号与系统笔记
- @[toc]
- 序列
- 序列的表示5e 4
- 序列的变换
- 序列运算
- 几个较为重要的序列
- 单位脉冲序列
- 单位阶跃序列
- 矩形序列
- DTFT(Discrete-time Fourier Transform)
- 定义
- 性质
- Z变换
- 定义
- 性质
- 系统
- 系统的特性
- 系统的表示
- 已知未完善地方
序列
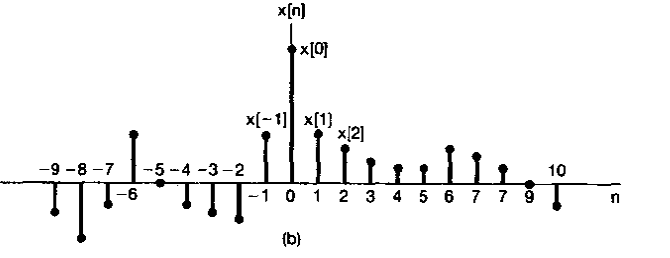
序列的表示5e 4
-
图形:
-
函数解析式:
y [ k ] = f 1 [ k ] + f 2 [ k ] + f 3 [ k ] + ⋯ f n [ k ] y[k] = f_1[k]+f_2[k]+f_3[k]+ \cdots f_n[k] y[k]=f1[k]+f2[k]+f3[k]+⋯fn[k] -
列表表示:
y [ n ] = 0 , 1 , 2 , 3 ˉ , 4 , 5 , 6 , 7 , 8 , 9 y[n] = {0,1,2,\bar{3},4,5,6,7,8,9} y[n]=0,1,2,3ˉ,4,5,6,7,8,9
其中取有箭头(下箭头)的为序列的起点(即n=0点)
序列的变换
- 序列的平移
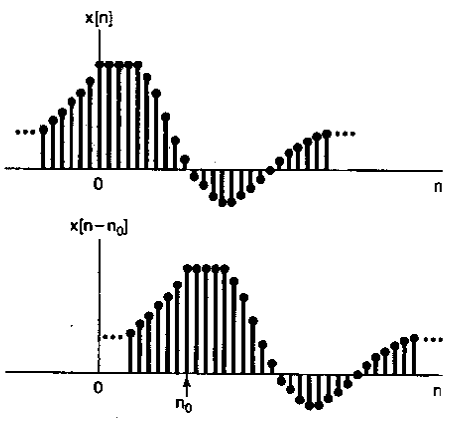
用表达式的写法就是:
y [ n ] = x [ n − n 0 ] y[n] = x[n-n_0] y[n]=x[n−n0]
- 序列的反转

用表达式的写法就是:
y [ n ] = x [ − n ] y[n] = x[-n] y[n]=x[−n]
- 序列的尺度变换

压缩时:
y [ n ] = x [ 2 n ] y[n] = x[2n] y[n]=x[2n]
展宽时:
y [ n ] = x [ n / 2 ] y[n] = x[n/2] y[n]=x[n/2]
实际上,书本上在这里举例的时候用了模拟信号,因为在数字序列中,这个操作又名为:抽取和内插.
序列运算
1.2.3. 翻转,位移,尺度变换见前
-
相加和相乘
y [ k ] = f 1 [ k ] + f 2 [ k ] + f 3 [ k ] + ⋯ f n [ k ] y[k] = f_1[k]+f_2[k]+f_3[k]+ \cdots f_n[k] y[k]=f1[k]+f2[k]+f3[k]+⋯fn[k]
y [ k ] = f 1 [ k ] ⋅ f 2 [ k ] ⋅ f 3 [ k ] ⋯ f n [ k ] y[k] = f_1[k]\cdot f_2[k]\cdot f_3[k] \cdots f_n[k] y[k]=f1[k]⋅f2[k]⋅f3[k]⋯fn[k] -
差分
a.前向差分:
△ f [ k ] = f [ k + 1 ] − f [ k ] \triangle f[k] = f[k+1] -f[k] △f[k]=f[k+1]−f[k]
b.后向差分
▽ f [ k ] = f [ k ] − f [ k − 1 ] \triangledown f[k] = f[k] - f[k-1] ▽f[k]=f[k]−f[k−1] -
求和
y [ k ] = ∑ n = − ∞ k f [ n ] y[k] = \sum^{k}_{n=-\infty }f[n] y[k]=n=−∞∑kf[n]
举个比较重要的例子:
u [ k ] = ∑ n = − ∞ k δ [ n ] u[k] = \sum^{k}_{n=-\infty }\delta[n] u[k]=n=−∞∑kδ[n] -
卷积和
连续上:
y ( t ) = f ( t ) ∗ h ( t ) = ∫ ∞ ∞ f ( τ ) h ( t − τ ) d τ y(t) = f(t)\ast h(t) = \int^{\infty}_{\infty}f(\tau)h(t-\tau) d\tau y(t)=f(t)∗h(t)=∫∞∞f(τ)h(t−τ)dτ
离散上:
y [ n ] = ∑ k = − ∞ + ∞ x [ k ] h [ n − k ] y[n] = \sum^{+\infty}_{k=- \infty}x[k]h[n-k] y[n]=k=−∞∑+∞x[k]h[n−k]
计算的步骤:
1.翻转2. 平移3. 相乘4. 累加
- 相关
连续上:
ϕ x y ( t ) = ∫ − ∞ ∞ x ( t + τ ) y ( τ ) d τ \phi_{xy}(t) = \int ^{\infty}_{-\infty} x(t+\tau) y(\tau)d \tau ϕxy(t)=∫−∞∞x(t+τ)y(τ)dτ
离散上:
r x y [ n ] = ∑ − ∞ ∞ x [ n ] y [ n + m ] r_{xy}[n] = \sum ^{\infty}_{-\infty} x[n] y[n + m] rxy[n]=−∞∑∞x[n]y[n+m]
举个较为简单的例子:周期函数的自相关函数
r x ( m + N ) = 1 N ∑ n = 0 N x ( n ) x ( n − m − N ) = 1 N ∑ n = 0 N x ( n ) x ( n − m ) = r x ( m ) r_x(m+N) = \frac1N\sum ^{N}_{n=0} x(n) x(n-m-N) = \frac1N\sum ^{N}_{n=0} x(n) x(n-m) = r_x(m) rx(m+N)=N1n=0∑Nx(n)x(n−m−N)=N1n=0∑Nx(n)x(n−m)=rx(m)
几个较为重要的序列
单位脉冲序列
δ [ n ] = { 0 , n ≠ 0 1 , n = 0 \delta[n] = \begin{cases} 0, \quad n\neq 0 \\1,\quad n=0 \end{cases} δ[n]={0,n̸=01,n=0
单位阶跃序列
u [ n ] = { 0 , n < 0 1 , n ≥ 0 u[n] = \begin{cases} 0, \quad n< 0 \\1,\quad n\geq 0 \end{cases} u[n]={0,n<01,n≥0
上述两种序列的关系:
单位脉冲序列是单位阶跃序列的一次差分:
δ [ n ] = u [ n ] − u [ n − 1 ] \delta [n] = u[n] -u[n-1] δ[n]=u[n]−u[n−1]
单位阶跃序列是单位脉冲序列的求和函数:
u [ n ] = ∑ m = − ∞ n δ [ m ] u [n] = \sum^n_{m=-\infty}\delta[m] u[n]=m=−∞∑nδ[m]
值得一提的是,可以使用移位脉冲序列来描述任意一个序列中的一位:
x [ n ] = ∑ k = − ∞ + ∞ x [ k ] δ [ n − k ] x[n] = \sum^{+\infty}_{k=- \infty}x[k]\delta[n-k] x[n]=k=−∞∑+∞x[k]δ[n−k]
当然,这也称为单位脉冲序列的筛选特性,当然,这也可以看成…
矩形序列
R N [ k ] = u [ k ] − u [ k − n 0 ] R_N[k] = u[k] -u[k-n_0] RN[k]=u[k]−u[k−n0]
DTFT(Discrete-time Fourier Transform)
定义
DTFT:
X ( e j Ω ) = ∑ n = − ∞ + ∞ x [ n ] e − j Ω n X(e^{j\Omega}) = \sum^{+\infty}_{n=- \infty} x[n] e^{-j\Omega n} X(ejΩ)=n=−∞∑+∞x[n]e−jΩn
iDTFT:
x [ n ] = 1 2 π ∫ 2 π X ( e j ω ) e j Ω d Ω x[n] = \frac1{2\pi} \int_{2\pi } X(e^{j\omega})e^{j\Omega } d\Omega x[n]=2π1∫2πX(ejω)ejΩdΩ
举个例子:考虑单边信号 x [ n ] = a n u [ n ] x[n] = a^n u[n] x[n]=anu[n]的DTFT:
X ( e j Ω ) = ∑ n = − ∞ + ∞ a n u [ n ] e − j Ω n = ∑ 0 + ∞ ( a e − j Ω ) n = 1 1 − a e − j Ω X(e^{j\Omega}) = \sum^{+\infty}_{n=- \infty} a^n u[n] e^{-j\Omega n} = \sum^{+\infty}_0 (ae^{-j\Omega})^n = \frac{1}{1-ae^{-j\Omega}} X(ejΩ)=n=−∞∑+∞anu[n]e−jΩn=0∑+∞(ae−jΩ)n=1−ae−jΩ1
最后一步由底数小于1的等比数列求和得到
性质
较多,故不作证明
- 周期性
X ( e j ( Ω + 2 π ) ) = X ( e j Ω ) X(e^{j(\Omega+2\pi)}) = X(e^{j\Omega}) X(ej(Ω+2π))=X(ejΩ) - 线性性质
a x 1 [ n ] + b x 2 [ n ] ⟷ F a X 1 ( e j Ω ) + b X 2 ( e j Ω ) ax_1[n] +bx_2[n] \stackrel{\mathcal{F}}{\longleftrightarrow} aX_1(e^{j\Omega})+bX_2(e^{j\Omega}) ax1[n]+bx2[n]⟷FaX1(ejΩ)+bX2(ejΩ) - 时移与频移
x [ n − n 0 ] ⟷ F e − j Ω n 0 X ( e j Ω ) x[n-n_0] \stackrel{\mathcal{F}}{\longleftrightarrow} e^{-j\Omega n_0}X(e^{j\Omega}) x[n−n0]⟷Fe−jΩn0X(ejΩ)
e − j Ω 0 n x [ n ] ⟷ F X ( e j ( Ω − Ω 0 ) e^{-j\Omega_0 n}x[n] \stackrel{\mathcal{F}}{\longleftrightarrow} X(e^{j(\Omega-\Omega_0}) e−jΩ0nx[n]⟷FX(ej(Ω−Ω0) - 共轭与共轭对称性
因为上课强调过,并且给了作业,就在这里详述一下
如果有
x [ n ] ⟷ F X ( e j Ω ) x[n] \stackrel{\mathcal{F}}{\longleftrightarrow} X(e^{j\Omega}) x[n]⟷FX(ejΩ)
则序列的共轭有:
x ∗ [ n ] ⟷ F X ∗ ( e − j Ω ) x^{\ast}[n] \stackrel{\mathcal{F}}{\longleftrightarrow} X^{\ast}(e^{-j\Omega}) x∗[n]⟷FX∗(e−jΩ)
在这个情况下,如果x[n]是一个实序列,则虚部不存在,则有:
X ( e j Ω ) = X ∗ ( e − j Ω ) X(e^{j\Omega}) = X^{\ast}(e^{-j\Omega}) X(ejΩ)=X∗(e−jΩ)
所以很容易就可以得到,他的DTFT的实部是偶函数,而他的虚部是奇函数.
同理易得,他的模是偶函数,他的相角是奇函数
-
差分与累加
x [ n ] − x [ n − 1 ] ⟷ F ( 1 − e − j Ω ) X ( e j Ω ) x[n] -x[n-1] \stackrel{\mathcal{F}}{\longleftrightarrow} (1 - e^{-j\Omega})X(e^{j\Omega}) x[n]−x[n−1]⟷F(1−e−jΩ)X(ejΩ)
实际上,考虑信号: y [ n ] = ∑ m = − ∞ n x [ m ] y[n] = \sum^n_{m=-\infty}x[m] y[n]=∑m=−∞nx[m]
他的傅里叶变换,可以用上面的式子得出:
y [ n ] = ∑ m = − ∞ n x [ m ] = 1 1 − e − j Ω X ( e j Ω ) + π X ( e j 0 ) ∑ − ∞ + ∞ δ ( Ω − 2 π k ) y[n] = \sum^n_{m=-\infty}x[m] = \frac1{1 - e^{-j\Omega}}X(e^{j\Omega}) + \pi X(e^{j0})\sum^{+\infty}_{-\infty}\delta(\Omega-2\pi k) y[n]=m=−∞∑nx[m]=1−e−jΩ1X(ejΩ)+πX(ej0)−∞∑+∞δ(Ω−2πk) -
时间反转
x [ − n ] ⟷ F X ( e − j Ω ) x[-n] \stackrel{\mathcal{F}}{\longleftrightarrow} X(e^{-j\Omega}) x[−n]⟷FX(e−jΩ) -
时域扩展
x ( k ) [ n ] ⟷ F X ( e j k Ω ) x_{(k)}[n] \stackrel{\mathcal{F}}{\longleftrightarrow} X(e^{jk\Omega}) x(k)[n]⟷FX(ejkΩ) -
频域微分
n x [ n ] ⟷ F j X ( e j Ω ) d Ω nx[n] \stackrel{\mathcal{F}}{\longleftrightarrow} j\frac{X(e^{j\Omega})}{d\Omega} nx[n]⟷FjdΩX(ejΩ) -
帕斯瓦尔定理
∑ n = − ∞ + ∞ ∣ x [ n ] ∣ 2 = 1 2 π ∫ 2 π ∣ X ( e j Ω ) ∣ 2 d Ω \sum^{+\infty}_{n=-\infty} |x[n]|^2 = \frac1{2\pi}\int_{2\pi}|X(e^{j\Omega})|^2d\Omega n=−∞∑+∞∣x[n]∣2=2π1∫2π∣X(ejΩ)∣2dΩ -
卷积性质相乘性质
对于$ y[n] = x[n]\ast h[n] = \sum^{+\infty}_{k=- \infty}x[k]h[n-k] $有:
Y ( e j Ω ) = X ( e j Ω ) H ( e j Ω ) Y(e^{j\Omega}) = X(e^{j\Omega}) H(e^{j\Omega}) Y(ejΩ)=X(ejΩ)H(ejΩ)
当考虑 y [ n ] = x 1 [ n ] x 2 [ n ] y[n] = x_1[n]x_2[n] y[n]=x1[n]x2[n]时,有:
Y ( e j Ω ) = 1 2 π ∫ 2 π X 1 ( e j θ ) X 2 ( e j ( Ω − θ ) ) d θ Y(e^{j\Omega}) = \frac1{2\pi}\int_{2\pi}X_1(e^{j\theta})X_2(e^{j(\Omega-\theta)})d\theta Y(ejΩ)=2π1∫2πX1(ejθ)X2(ej(Ω−θ))dθ
- 对偶性
当然这是一个很重要的性质,但是这里更多的是理解,看书吧
Z变换
定义
X ( z ) ≜ ∑ n = − ∞ + ∞ x [ n ] z − n X(z) \triangleq \sum^{+\infty}_{n=- \infty} x[n] z^{-n} X(z)≜n=−∞∑+∞x[n]z−n
x [ n ] = 1 2 π j ∮ X ( z ) z n − 1 d z x[n] = \frac1{2\pi j} \oint X(z)z^{n-1} dz x[n]=2πj1∮X(z)zn−1dz
性质
-
线性性质
a x 1 [ n ] + b x 2 [ n ] ⟷ Z a X 1 ( z ) + b X 2 ( z ) ax_1[n] +bx_2[n] \stackrel{\mathcal{Z}}{\longleftrightarrow} aX_1(z)+bX_2(z) ax1[n]+bx2[n]⟷ZaX1(z)+bX2(z) -
时移性质
x [ n − n 0 ] ⟷ Z z − n 0 X ( z ) x[n-n_0] \stackrel{\mathcal{Z}}{\longleftrightarrow} z^{-n_0}X(z) x[n−n0]⟷Zz−n0X(z) -
z域尺度变换
z 0 n x [ n ] ⟷ Z X ( z z 0 ) z_0^n x[n] \stackrel{\mathcal{Z}}{\longleftrightarrow} X(\frac z{z_0}) z0nx[n]⟷ZX(z0z) -
时间反转
x [ − n ] ⟷ Z X ( 1 z ) x[-n] \stackrel{\mathcal{Z}}{\longleftrightarrow} X(\frac1z) x[−n]⟷ZX(z1) -
时域扩展
x ( k ) [ n ] ⟷ Z X ( z k ) x_{(k)}[n] \stackrel{\mathcal{Z}}{\longleftrightarrow} X(z^k) x(k)[n]⟷ZX(zk) -
共轭
如果有
x [ n ] ⟷ Z X ( z ) x[n] \stackrel{\mathcal{Z}}{\longleftrightarrow} X(z) x[n]⟷ZX(z)
则序列的共轭有:
x ∗ [ n ] ⟷ Z X ∗ ( z ∗ ) x^{\ast}[n] \stackrel{\mathcal{Z}}{\longleftrightarrow} X^{\ast}(z^{\ast}) x∗[n]⟷ZX∗(z∗) -
卷积性质
x 1 [ n ] ∗ x 2 [ n ] ⟷ Z X 1 ( z ) X 2 ( z ) x_1[n]\ast x_2[n] \stackrel{\mathcal{Z}}{\longleftrightarrow} X_1(z)X_2(z) x1[n]∗x2[n]⟷ZX1(z)X2(z)
8. 频域微分
n x [ n ] ⟷ Z − z X ( z ) d z nx[n] \stackrel{\mathcal{Z}}{\longleftrightarrow} -z\frac{X(z)}{dz} nx[n]⟷Z−zdzX(z)
9. 初值定理
当n<0时,x[n]=0,则
x [ 0 ] = lim z → ∞ X ( z ) x[0] = \lim_{z\rightarrow \infty} X(z) x[0]=z→∞limX(z)
10. z变换本身的性质(时间问题,只做简述)
a.稳定性:极点在单位圆里面
b.因果性:系统函数的收敛域在某个圆的外边,且包括无限远点
系统
在上面的基础上,这里就只做简述吧
系统的特性
针对线性移不变系统,其中线性有:
- 其次性
- 叠加性
移不动指的是,输入移一位,输出也跟着移一位,不会有什么妖魔鬼怪 - 稳定性
∣ h ( t ) ∣ < ∞ |h(t)|<\infty ∣h(t)∣<∞ - 因果性
h ( t ) = 0 , t < 0 h(t)=0 ,t<0 h(t)=0,t<0
相应用z变换判断的在上头
系统的表示
- 框图
- 差分方程
- 系统单位脉冲响应h[k]
- 系统频率响应 H ( j ω ) H(j\omega) H(jω)
- 系统函数H(z)
相应的转换关系:
-
差分方程to系统函数:
已知差分方程:
∑ i = 0 n a i y [ k − i ] = ∑ j = 0 m b j f [ k − j ] \sum^n_{i=0} a_iy[k-i] = \sum_{j=0}^m b_jf[k-j] i=0∑naiy[k−i]=j=0∑mbjf[k−j]
对其求z变换得:
∑ i = 0 n a i z − i Y f ( z ) = ∑ j = 0 m b j z − i F [ z ] \sum^n_{i=0} a_iz^{-i}Y_f(z)= \sum_{j=0}^m b_j z^{-i} F[z] i=0∑naiz−iYf(z)=j=0∑mbjz−iF[z]
所以系统函数为:
H ( z ) = Y f ( z ) F ( z ) = ∑ j = 0 m b j z − j s u m i = 0 n a i z − i H(z) = \frac{Y_f(z)}{F(z)}= \frac{\sum_{j=0}^m b_j z^{-j}}{sum^n_{i=0} a_iz^{-i}} H(z)=F(z)Yf(z)=sumi=0naiz−i∑j=0mbjz−j -
系统函数to系统单位脉冲响应h[k]
H ( z ) = Y f ( z ) F ( z ) = Z { h [ k ] } H(z) = \frac{Y_f(z)}{F(z)} =\mathcal{Z}\{ h[k] \} H(z)=F(z)Yf(z)=Z{h[k]} -
系统函数to系统频率响应
对因果系统,且系统稳定时:
H ( e j Ω ) = H ( z ) ∣ z = e j Ω = ∣ H ( e j Ω ) ∣ e j φ ( Ω ) H(e^{j\Omega}) = H(z)|_{z=e^{j\Omega}} = |H(e^{j\Omega}) | e^{j\varphi (\Omega)} H(ejΩ)=H(z)∣z=ejΩ=∣H(ejΩ)∣ejφ(Ω) -
系统函数to框图
- 先将系统函数化成零极点形式
- 按照零点系数和阶数画前馈通路
- 按照极点系数和阶数画后馈通路
已知未完善地方
- z变换本身的性质写得不多
- 没介绍模拟的奇异信号及其性质