Python+OpenGL实现增强现实
1、照相机标定
标定照相机是指计算出该照相机的内参数。
def my_calibration(sz):
"""
Calibration function for the camera (iPhone4) used in this example.
"""
row, col = sz
fx = 2555*col/2592
fy = 2586*row/1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5*col
K[1, 2] = 0.5*row
return K
以平面和标记物进行姿态估计
为了检验单应性矩阵的准确性,我们需要将一些简单的三维物体放置在标记物上,这里我们使用一个立方体。
def cube_points(c, wid):
""" Creates a list of points for plotting
a cube with plot. (the first 5 points are
the bottom square, some sides repeated). """
p = []
# bottom
p.append([c[0]-wid, c[1]-wid, c[2]-wid])
p.append([c[0]-wid, c[1]+wid, c[2]-wid])
p.append([c[0]+wid, c[1]+wid, c[2]-wid])
p.append([c[0]+wid, c[1]-wid, c[2]-wid])
p.append([c[0]-wid, c[1]-wid, c[2]-wid]) #same as first to close plot
# top
p.append([c[0]-wid, c[1]-wid, c[2]+wid])
p.append([c[0]-wid, c[1]+wid, c[2]+wid])
p.append([c[0]+wid, c[1]+wid, c[2]+wid])
p.append([c[0]+wid, c[1]-wid, c[2]+wid])
p.append([c[0]-wid, c[1]-wid, c[2]+wid]) #same as first to close plot
# vertical sides
p.append([c[0]-wid, c[1]-wid, c[2]+wid])
p.append([c[0]-wid, c[1]+wid, c[2]+wid])
p.append([c[0]-wid, c[1]+wid, c[2]-wid])
p.append([c[0]+wid, c[1]+wid, c[2]-wid])
p.append([c[0]+wid, c[1]+wid, c[2]+wid])
p.append([c[0]+wid, c[1]-wid, c[2]+wid])
p.append([c[0]+wid, c[1]-wid, c[2]-wid])
return array(p).T
sift.process_image('book_frontal.JPG', 'im0.sift')
l0, d0 = sift.read_features_from_file('im0.sift')
sift.process_image('book_perspective.JPG', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
matches = sift.match_twosided(d0, d1)
ndx = matches.nonzero()[0]
fp = homography.make_homog(l0[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
tp = homography.make_homog(l1[ndx2, :2].T)
model = homography.RansacModel()
H, inliers = homography.H_from_ransac(fp, tp, model)
#camera calibration
K = my_calibration((747, 1000))
#3D points at plane z=0 with sides of length 0.2
box = cube_points([0, 0, 0.1], 0.1)
#project bottom square in first image
cam1 = camera.Camera(hstack((K, dot(K, array([[0], [0], [-1]])))))
#first points are the bottom square
box_cam1 = cam1.project(homography.make_homog(box[:, :5]))
#use H to transfer points to the second image
box_trans = homography.normalize(dot(H,box_cam1))
#compute second camera matrix from cam1 and H
cam2 = camera.Camera(dot(H, cam1.P))
A = dot(linalg.inv(K), cam2.P[:, :3])
A = array([A[:, 0], A[:, 1], cross(A[:, 0], A[:, 1])]).T
cam2.P[:, :3] = dot(K, A)
#project with the second camera
box_cam2 = cam2.project(homography.make_homog(box))
二、增强现实
1、什么是增强现实?
增强现实(Augmented Reality,简称AR)。
增强现实技术,它是一种将真实世界信息和虚拟世界信息“无缝”集成的新技术,是把原本在现实世界的一定时间空间范围内很难体验到的实体信息(视觉信息,声音,味道,触觉等),通过电脑等科学技术,模拟仿真后再叠加,将虚拟的信息应用到真实世界,被人类感官所感知,从而达到超越现实的感官体验。真实的环境和虚拟的物体实时地叠加到了同一个画面或空间同时存在。
增强现实技术,不仅展现了真实世界的信息,而且将虚拟的信息同时显示出来,两种信息相互补充、叠加。在视觉化的增强现实中,用户利用头盔显示器,把真实世界与电脑图形多重合成在一起,便可以看到真实的世界围绕着它。
增强现实技术包含了多媒体、三维建模、实时视频显示及控制、多传感器溶合、实时跟踪及注册、场景融合等新技术与新手段。增强现实提供了在一般情况下,不同于人类可以感知的信息。
2、怎么实现?
1)、识别参考平面。
2)、估计单应性。
3)、从单应性推导出从参考面坐标系到目标图像坐标系的转换。
4)、在图像(像素空间)中投影我们的3D模型并绘制它。
三、关于OpenGL
OpenGL 是 Open Graphics Library 的简写,意为“开放式图形库”,是用于渲染 2D、3D
矢量图形的跨语言、跨平台的应用程序编程接口(API)。OpenGL 不是一个独立的平台,因此,它需要借助于一种编程语言才能被使用。C / C++ / python / java 都可以很好支持 OpengGL.
我使用的是python。
*首先配置pyOpenGL.64位系统不建议直接pip,pip默认是32位的OpenGL,到该网址https://www.lfd.uci.edu/~gohlke/pythonlibs/#pygame下载与你的python匹配的OPenGL,在命令行输入 pip intall 路径+xxx.whl 安装即可。
*配置pygame.上述网址,下载whl文件安装。
三、3D茶壶实例
1、运行结果
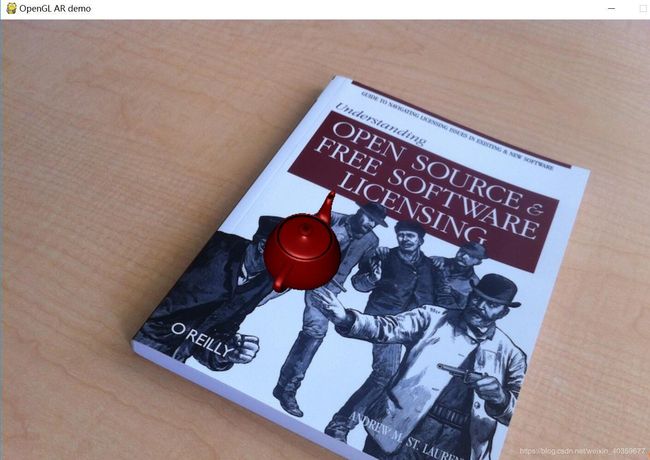
-------------------------------------------------图3-1.3D立体茶壶-------------------------------
2、具体代码
import math
import pickle
from pylab import *
from OpenGL.GL import *
from OpenGL.GLU import *
from OpenGL.GLUT import *
import pygame, pygame.image
from pygame.locals import *
from PCV.geometry import homography, camera
from PCV.localdescriptors import sift
def cube_points(c, wid):
""" Creates a list of points for plotting
a cube with plot. (the first 5 points are
the bottom square, some sides repeated). """
p = []
# bottom
p.append([c[0]-wid, c[1]-wid, c[2]-wid])
p.append([c[0]-wid, c[1]+wid, c[2]-wid])
p.append([c[0]+wid, c[1]+wid, c[2]-wid])
p.append([c[0]+wid, c[1]-wid, c[2]-wid])
p.append([c[0]-wid, c[1]-wid, c[2]-wid]) #same as first to close plot
# top
p.append([c[0]-wid, c[1]-wid, c[2]+wid])
p.append([c[0]-wid, c[1]+wid, c[2]+wid])
p.append([c[0]+wid, c[1]+wid, c[2]+wid])
p.append([c[0]+wid, c[1]-wid, c[2]+wid])
p.append([c[0]-wid, c[1]-wid, c[2]+wid]) #same as first to close plot
# vertical sides
p.append([c[0]-wid, c[1]-wid, c[2]+wid])
p.append([c[0]-wid, c[1]+wid, c[2]+wid])
p.append([c[0]-wid, c[1]+wid, c[2]-wid])
p.append([c[0]+wid, c[1]+wid, c[2]-wid])
p.append([c[0]+wid, c[1]+wid, c[2]+wid])
p.append([c[0]+wid, c[1]-wid, c[2]+wid])
p.append([c[0]+wid, c[1]-wid, c[2]-wid])
return array(p).T
def my_calibration(sz):
row, col = sz
fx = 2555*col/2592
fy = 2586*row/1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5*col
K[1, 2] = 0.5*row
return K
#glMatrixMode(GL_PROJECTION);//glMatrixMode指定后续矩阵操作所使用的matrix stack。
def set_projection_from_camera(K):
glMatrixMode(GL_PROJECTION)
glLoadIdentity()
fx = K[0,0]
fy = K[1,1]
fovy = 2*math.atan(0.5*height/fy)*180/math.pi
aspect = (width*fy)/(height*fx)
near = 0.1
far = 100.0
gluPerspective(fovy,aspect,near,far)
glViewport(0,0,width,height)
#一个矩阵操作--模型视图(MODELVIEW)
MODELVIEW是在世界坐标系中进行的。在这个坐标系中,可以对观察目标实施平移glTranslatef()、旋转glRotatef()和放大缩小glScalef()。如果观察目标是立方体,其Y轴比例为2.0,其余都为1.0,就是说将立方体变成长方体。
def set_modelview_from_camera(Rt):
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
Rx = np.array([[1,0,0],[0,0,-1],[0,1,0]])
R = Rt[:,:3]
U,S,V = np.linalg.svd(R)
R = np.dot(U,V)
R[0,:] = -R[0,:]
t = Rt[:,3]
M = np.eye(4)
M[:3,:3] = np.dot(R,Rx)
M[:3,3] = t
M = M.T
m = M.flatten()
glLoadMatrixf(m)
#下面的函数绘制红色茶壶,首先用前面设置的清除色黑色(glClearColor(0.0, 0.0, 0.0, 0.0))清除色彩缓冲区,然后指定绘图颜色为红色,绘制一个茶壶。渲染引擎绘图。
def draw_background(imname):
bg_image = pygame.image.load(imname).convert()
bg_data = pygame.image.tostring(bg_image,"RGBX",1)
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT)
glEnable(GL_TEXTURE_2D)
glBindTexture(GL_TEXTURE_2D,glGenTextures(1))
glTexImage2D(GL_TEXTURE_2D,0,GL_RGBA,width,height,0,GL_RGBA,GL_UNSIGNED_BYTE,bg_data)
glTexParameterf(GL_TEXTURE_2D,GL_TEXTURE_MAG_FILTER,GL_NEAREST)
glTexParameterf(GL_TEXTURE_2D,GL_TEXTURE_MIN_FILTER,GL_NEAREST)
glBegin(GL_QUADS)
glTexCoord2f(0.0,0.0); glVertex3f(-1.0,-1.0,-1.0)
glTexCoord2f(1.0,0.0); glVertex3f( 1.0,-1.0,-1.0)
glTexCoord2f(1.0,1.0); glVertex3f( 1.0, 1.0,-1.0)
glTexCoord2f(0.0,1.0); glVertex3f(-1.0, 1.0,-1.0)
glEnd()
glDeleteTextures(1)
def draw_teapot(size):
glEnable(GL_LIGHTING)
glEnable(GL_LIGHT0)
glEnable(GL_DEPTH_TEST)
glClear(GL_DEPTH_BUFFER_BIT)
glMaterialfv(GL_FRONT,GL_AMBIENT,[0,0,0,0])
glMaterialfv(GL_FRONT,GL_DIFFUSE,[0.5,0.0,0.0,0.0])
glMaterialfv(GL_FRONT,GL_SPECULAR,[0.7,0.6,0.6,0.0])
glMaterialf(GL_FRONT,GL_SHININESS,0.25*128.0)
glutSolidTeapot(size)
width,height = 1000,747
def setup():
pygame.init()
pygame.display.set_mode((width,height),OPENGL | DOUBLEBUF)
pygame.display.set_caption("OpenGL AR demo")
# compute features
sift.process_image('book_frontal.JPG', 'im0.sift')
l0, d0 = sift.read_features_from_file('im0.sift')
sift.process_image('book_perspective.JPG', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
# match features and estimate homography
matches = sift.match_twosided(d0, d1)
ndx = matches.nonzero()[0]
fp = homography.make_homog(l0[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
tp = homography.make_homog(l1[ndx2, :2].T)
model = homography.RansacModel()
H, inliers = homography.H_from_ransac(fp, tp, model)
K = my_calibration((747, 1000))
cam1 = camera.Camera(hstack((K, dot(K, array([[0], [0], [-1]])))))
box = cube_points([0, 0, 0.1], 0.1)
box_cam1 = cam1.project(homography.make_homog(box[:, :5]))
box_trans = homography.normalize(dot(H,box_cam1))
cam2 = camera.Camera(dot(H, cam1.P))
A = dot(linalg.inv(K), cam2.P[:, :3])
A = array([A[:, 0], A[:, 1], cross(A[:, 0], A[:, 1])]).T
cam2.P[:, :3] = dot(K, A)
Rt=dot(linalg.inv(K),cam2.P)
setup()
draw_background("book_perspective.bmp")
set_projection_from_camera(K)
set_modelview_from_camera(Rt)
draw_teapot(0.05)
pygame.display.flip()
while True:
for event in pygame.event.get():
if event.type==pygame.QUIT:
sys.exit()
四、问题
配置好OpenGL和pygame,运行代码出现以下问题

原因是freeglut与gult动态库冲突了,把freeglut64删掉即可,剩下glut64
