智能网联汽车——未来发展趋势
一、技术的发展趋势
1.总体发展路线
- 渐进式:传统的主机厂受现有开发体系和供应链的牵制,选择以核心技术和终端产品为主线的逐级发展路线,即从L1开始逐级过渡到L5量产
- 跨越式:互联网企业,没有历史包袱,且以商业模式和未来产业生态布局为着眼点,故选择与传统车厂差异化的发展路径,直接由L4/L5高位切入,然后不断丰富车辆驾驶场景
2.现阶段应用场景
2.1高速公路自动驾驶
- 工况相对简单、障碍物类型单一、车道线等结构化特征明显
- 长途驾驶易疲劳,驾驶员对自动驾驶系统需求较强
- 易发生重大安全事故,可明显改善交通安全
2.2低速与限定场景
无人物流:借助无人驾驶技术,装卸、运输、收货、仓储等物流工作将逐渐实现无人化和机器化,促使物流领域大大降低成本。
公共交通:在园区、校区内应用公交车的无人驾驶系统,能及时对突发状况做出反应,可实现无人驾驶下的行人车辆检测、减速避让、紧急停车、障碍物绕行变道、自动按站停靠等功能,并且公交车的路线一般固定。
环卫:无人驾驶清洁车通过自主识别环境,规划路线并自动清洁,实现全自动、全工况、精细化、高效率的清洁作业。
港口码头:无人驾驶技术在港口码头场景的转化应用,可有效解决传统人工驾驶时,存在的行驶线路不精准、转弯造成视线盲区、司机疲劳驾驶等问题,节约人工成本。
矿山开采:无人驾驶在矿山开采中,通过技术支撑,矿山开采整体能耗下降、综合运营效益提升,提高矿区安全生产工作,加快智慧矿区的建设。
零售:无人驾驶技术让零售实体店突破以往的区域限制,打破线下有形场景与线上无形场景的边界,实现零售业态的全面升级。
3.环境感知
3.1传感器的布置
配置一:高精度地图+多线束激光雷达
成本高、数据量大,适合L3、L4级别智能车
配置二:毫米波雷达+少线束激光霤达+摄像头+超声波雷达
传感器成本相对较低,适用于L1、L2级别智能车
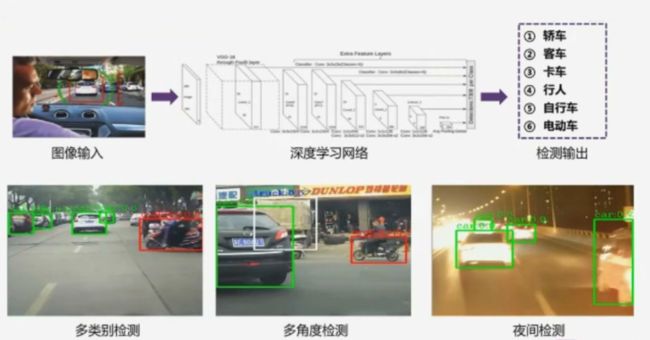
3.2 基于深度学习的多目标检测
优点:
-
自动提取特征,端到端的模型
-
发掘隐藏规律,更高的精度
-
大数据和硬件发展以及算法的驱动
缺点:
-
需要大量的高质量数据作为学习样本,对数据采集和标注提出了较高的要求
-
内在机理不清,边界条件不确定,需要与传统方法融合,以保证可靠性
-
受限于目前车载芯片处理能力的限制,高速场景下计算的实时性不能保证
-
恶意样本的欺骗性:噪声会影响对目标精准的识别

3.3激光雷达
1)激光雷达的成本将进一步降低:多家企业均宣称量产后激光雷达价格将降至200-500美元。
2)激光雷达向多线束以及固态激光雷达发展:在2018年的CES(国际消费类电子产品展览会)上, Ve lodyne对外展示了两款产品:128线激光雷达VLS-128和固态激光雷达 Velarray。
3)国产激光雷达将占有一席之地。
3.4高精度地图与高精度定位
高精度地图:地图与北斗导航、视觉/雷达CAN总线等系统将实现深度的信息融合,5G技术应用将帮助实现高精度三维地图的实时自动增量更新,高精度地图数据采集式样、交换格式和物理存储将逐步的标准化。
高精度定位:全国北斗地基增强系统将得到快速的推广,为车辆低成本的精确定位提供条件。
4.决策
4.1端到端决策
以车载传感器(摄像头和激光雷达)为输入,以驾驶员操作(油门、刹车、方向盘)为输出,在深度神经网络模型的训练下,将决策过程视作一个不可分解的黑箱,主要的问题是决策结果不具有逻辑可解释性,并且预覆盖所有场景困难,数据需求量大。
4.2分解式决策
将决策过程分解为独立的简单的子问题,如场景认知、运动预测、行为决策、轨迹规划等,每一个问题独立求解。
5.底盘控制系统
5.1转向
在传统EPS基础上更新控制器,重新匹配电机功率或重新设计转向系统使其具备主动转向功能。
5.2制动
在原ABS或ESP基础上进行改造或重新设计制动系统,使其具备主动制动功能。
5.3驱动
在电动汽车上易于实现线控(VCU的主要功能是实现扭矩需求的计算以及实现扭矩分配。因此只需要VCU开放速度控制接囗就能实现主动驱动),在传统燃油车上,发动机转矩控制精度有限,且变速箱需要进行一定改造。
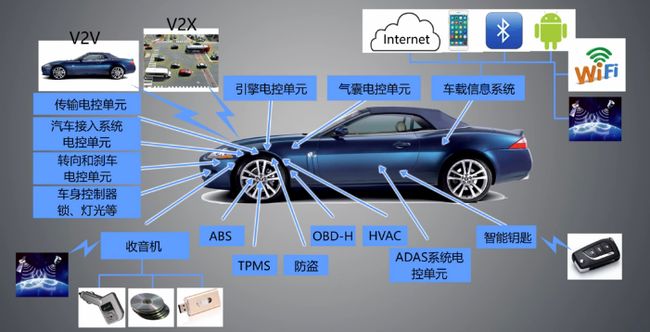
6.车联网
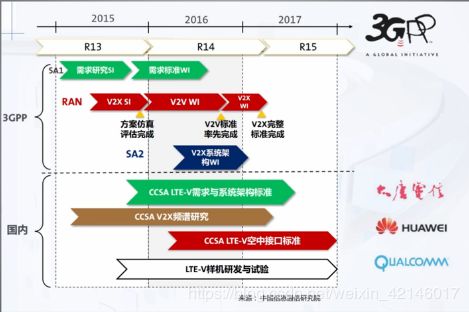
车辆通信技术的发展存在DSRC与LTE-V两条不同的路径。
DSRC:DSRC技术与标准已较为成熟,美日欧等国可能通过强制法规手段大力推动,应用主要限于安全相关的领域。

LET-V:正在国际范围内加快推进,可能在中国成为主流车联网通信系统。随着时间推移,LTE—V技术由于可以向5G平滑过渡,其发展对DSRC造成越来越大压力。
7.信息安全
汽车信息安全是随着车辆网联化比例的提升,而得到越来越高的关注。为了防范黑客入侵非法获取数据,葚至远程控制车辆等潜在的威胁,必须高度重视信息安全防范,出台汽车信息安全标准与评价体系。
8.测试评价技术
智能汽车的测试评价方法与传统汽车有很大差异,需要专门的评价体系和测试场地。
1)需要对自动驾驶系统的基本要素功能进行考核
- 图像识别能力
- 雷达对障碍物的探测能力
- 网络联通能力
- 执行器的控制性能
- 信息安全防护性能
2)需要对自动驾驶理解我国相关交通法规的能力进行考核
- 对信号灯的识别
- 对交警手势的识别
- 对限速限高等交通标识物的识别
3)需要专门整理出自动驾驶汽车会遇见的典型场景工况,对自动驾驶系统进行各场景下的专门测试
4)让自动驾驶汽车在划分好的测试区域内面对真实的随机出现的交通情况做出自主决策与控制,检测其是否能够依法依规安全行驶
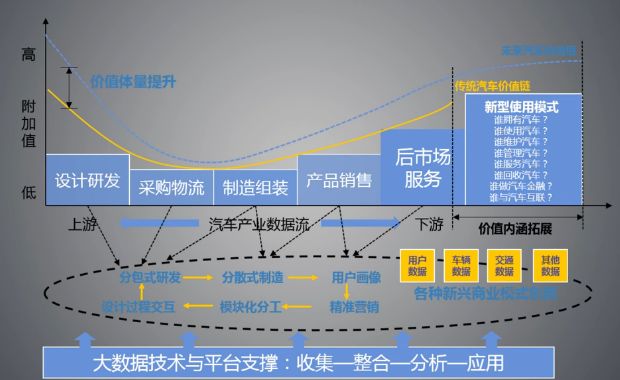
二、产业的重大变革
1.数据成为未来竞争的核心要素
2.互联网造车

-
产业变革与技术发展为互联网企业提供了突破传统车企壁垒的绝佳机遇
-
同时传统汽车企业着能依托优势资源把握智能网联的发展趋势,也将有巨大的发展机遇,摆脱低利润的制造企业的困境
3.硬件和软件都将是未来汽车的核心竞争力

三、变革与挑战
1.变革
长期而言,基于人工智能技术,实现无人驾驶的出租车将会在汽车领域产生颠覆性的变革。
1)颠覆出租车市场
有效载客时间高于传统出租车80%,成本降低至出租车的12%
2)改善城市空间布局
节省40%的停车空间
3)优化城市交通
可平均减少30%交通拥堵时间
4)颠覆私家车市场
相对自有购买车辆,无人驾驶出租车存在更高的经济性、便利性优势
2.挑战
但自动驾驶的未来发展,目前来看还需要突破法律法规、伦理与基础设施的三大挑战。
1)法律法规:适用于自动驾驶的交通安全法及其实施条例、相关机动车行驶的技术标准
缺失,其制定还面临诸多不确定性
2)伦理:在行人与驾驶者的安全之间,人工智能的道德判定应该怎样预设存在争议
3)基础设施:未来自动驾驶普及需要5G通讯技术的建设与商业化;直接决定自动驾驶系统的安全与可靠性的高精地图,其行业处于发展初期,目前仍还面临诸多挑战
四、总结
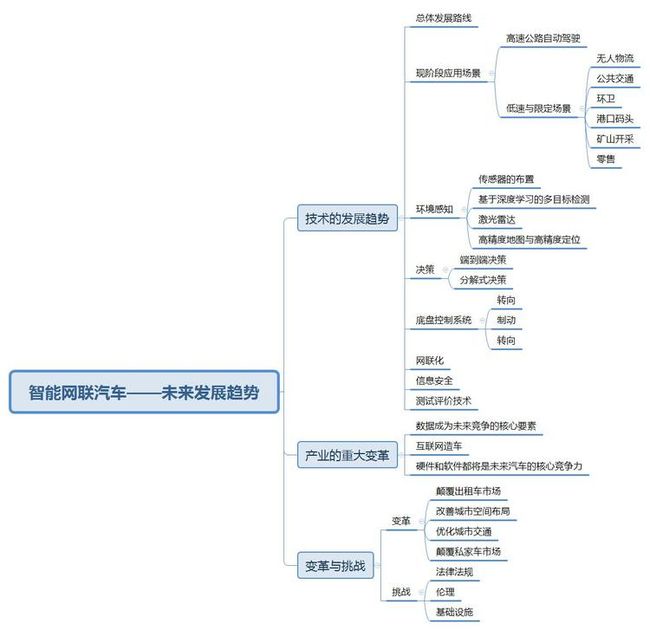
给出本文的思维导图,回忆一下~
