智能网联汽车——安全问题
乘车出行,安全是基本保障。本篇推送主要介绍汽车在安全方面的分类以及具体的策略。
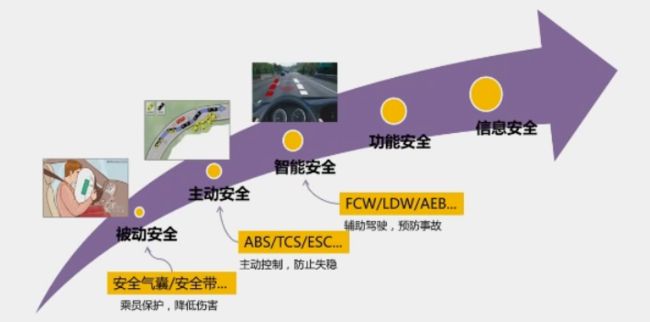
一、汽车被动安全
汽车发生碰撞事故,保护驾驶员的安全。主要包括安全气囊和安全带。
二、汽车主动安全
汽车行驶是靠轮胎和地面产生的摩擦力来进行驱动和制动。一旦车辆加速度非常大,汽车的惯性比地面提供的摩擦力大时就会发生滑移,然后就会失稳发生事故。
主动安全就是保证汽车在失稳的情况下汽车可以稳定行驶。主要包括ABS(制动防抱死系统)、TCS(牵引力控制系统)、ESP(车身电子稳定系统)。
三、汽车智能安全
主要是基于车辆传感器的一些驾驶辅助系统来预防事故的发生,比如前方碰撞预警系统、并线辅助系统、车道保持系统、疲劳预警系统等。之前也专门在《智能网联汽车——传感器与驾驶辅助》这一篇推送详细介绍过。
前三种安全对于汽车的架构不需要做太大的调整,接下来介绍的两种安全需要对汽车本身做重大的调整。
四、汽车功能安全
功能安全是指智能车辆发生感知错误、决策失误、控制失效等故障时,系统仍能保持车辆的安全条件或保证其进入到安全状态。
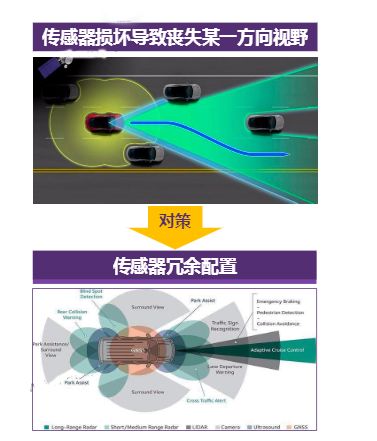
1.感知错误
1)传感器损坏导致丧失某一方向视野,比如前向摄像头损坏。策略就是冗余配置传感器,在某一方向上要有一套以上的传感器系统去覆盖视野。
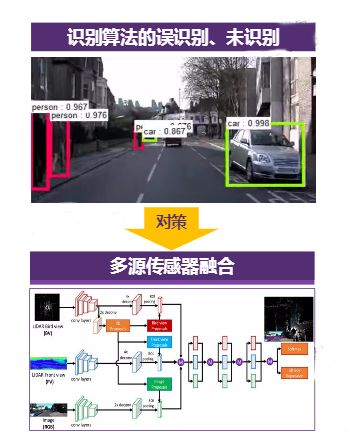
2)实际道路中,由于目标种类繁多,利用摄像头识别可能捕捉不到全部的目标,目标缺失。有时由于光照原因不能有效获取,比如强光、弱光条件下摄像头会失效。策略是利用多源传感器进行融合,比如激光雷达在雨雪天气受到影响就需要毫米波雷达作为辅助。
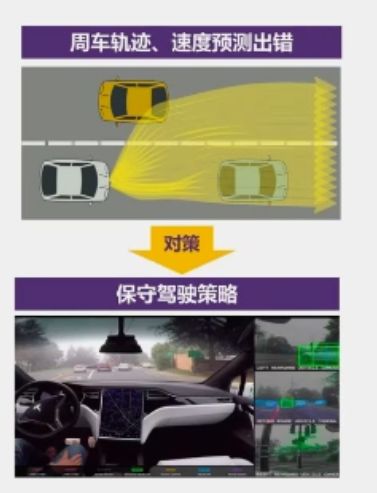
2.决策失误
当本车对周围车辆的轨迹、速度预测,决定本车驾驶策略时,可能会产生误判或者预测出错的情况。那么在整个安全驾驶策略里面必须有一个安全的底线,即保守的驾驶策略。这个在软件架构里面必须要考虑的。
3.控制失效
当场景内障碍物较多,过于复杂,系统难以应对,即控制策略失效时。就需要人类驾驶员接管车辆,实现人机共驾。

4.总结
汽车的快速行驶、低排放、保证安全性等,这些都是汽车要求的基本功能。在自动驾驶车辆诞生之前,都是由驾驶员应对系统失效、各种传感器失效。现在由主控制器代替人类驾驶员,应对以上问题功能安全必须要考虑。
五、汽车信息安全
1.概念
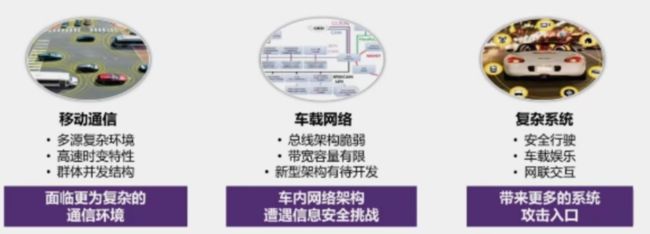
汽车信息安全指由于汽车在智能化、网联化、电动化中的技术变革带来的信息安全问题,具体表现为
1)智能化:
- 程序复杂:至少100台车载电脑,适行6000万行代码,无人驾驶2亿行以上的代码。
- 智能控制:采用感知一决策一控制来代替人对机械部分直接控制。信息安全不仅损失经济,可能会成为社会安全问题。
2)网联化:
- 固有缺陷:使用的计算和联网系统沿袭了既有的计算和联网架构,也继承了这些系统天然的安全缺陷。
- 数据联通:车载信息系统与外界互联互通,共享信息指数增加,涉及用户隐私安全。
3)电动化:
- 充电桩:控制模块的PLC电路通过以太网与管理系统连接,在整个网络内部缺少防护。
- 电池管理系统:通过攻击BMS的控制算法从而影响电动车的电池性能。
2.事件
1)2015年宝马数字服务系统漏洞
2)2016年特斯拉远程入侵事件
3)2016年尼桑LEAF汽车API泄露事件
4)2015年JEEP自由光入侵事件
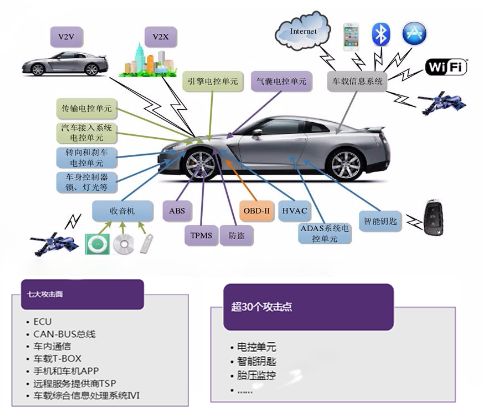
3.风险的来源
两张网和一个端:
具体包括:
4.各国的应对之策
1)总体趋势:整个世界范围内从入侵检测这样的研究转向正向的智能汽车信息安全架构设计
2)国外:

3)国内(从国家各个层面都非常关注):
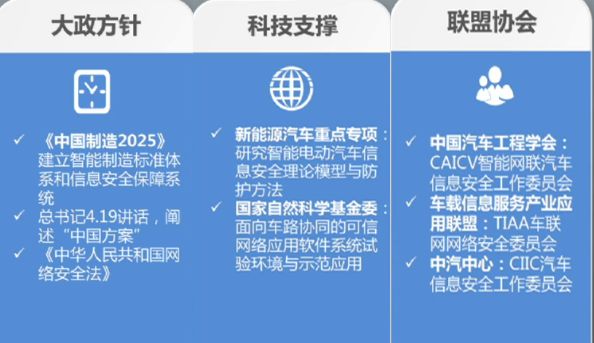
尤其是中国汽车工程协会(CAICV)作出了巨大贡献。
-
2016年制定了智能网联汽车的信息安全的路线图。
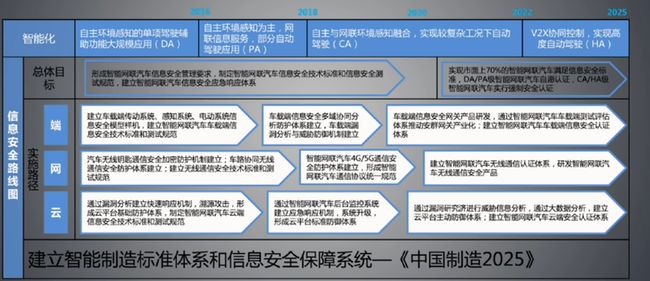
-
在智能网联汽车信息安全的关键技术研发方面提出了“端-网-云”一体化的入侵检测系统。
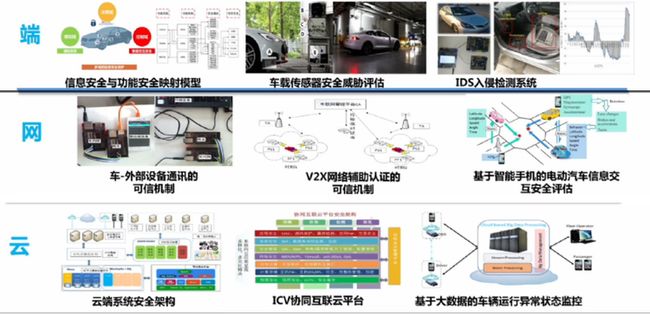
5.信息安全立体防护体系
对于智能网联汽车现在所要构建的是包括这样的一种立体防护体系在内的,
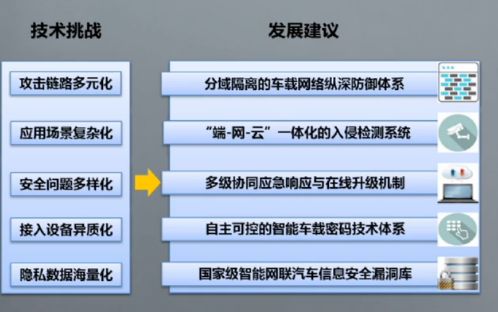
然后在具体的车辆信息安全防护平台方面,主要是构建四个体系来推动。
- 标准体系:汽车内部的标准其实和互联网的标准发展相比,和通信的标准发展相比相对而言比较滞后的
- 密码体系:自主可控的密码体系的推动
- 架构体系:纵深防御的架构体系的设计
- IDS(入侵检测系统)技术
6.产品
博世:
中央网关(Cross-Domain Communication):实现通信功能,在线升级以及对信息安全的防护,实现类似于防火墙的功能;
入侵检测防护系统(IDPS):将驾驶行为的数据能够在线收集起来传递到云平台或云平台分析究竟哪些是入侵行为,哪些是它的一个正常的数据行为,从而能够对于入侵行为提出一些的解决方案。通过OTA,能够对于车载的信息系统提供一个保护和防护。
六、总结
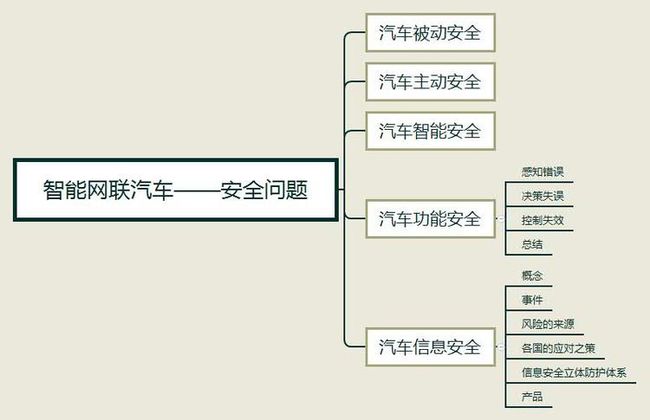
给出本文的思维导图,回忆一下~
