第九章 机器人SLAM建图 课后作业
第九章 机器人SLAM建图 课后作业
- 代码包
- 课后作业
- 第一题
- 1、机器人模型
- 2、robot_rplidar_nav.launch
- 3、robot in room
- 4、robot in museum
- 第二题
- 1、使用gmapping算法建图
- (1)gmapping_demo.launch
- (2)gmapping.launch
- (3)建图
- room
- museum
- 2、使用hector算法建图
- (1)hector_demo.launch
- (2)hector.launch
- (3)建图
- room
- meseum
代码包
所有代码已上传至github网站:
github链接: https://github.com/YuemingBi/ros_practice/tree/master
课后作业
1、在Gazebo中构建一个用于建图和导航的虚拟环境,可以使用Building Editor工具创建,也可以使用其他功能包中已有的虚拟环境。
2、将自己构建的机器人模型放置到虚拟环境中,使用gmapping和hector功能包实现SLAM地图构建,并将建立完成的地图保存到功能包的maps文件夹中。
第一题
第一题我使用了两个仿真环境,一个是自己利用Building Editor工具创建的比较简单的仿真环境room.world;另一个是使用中科院软件博物馆仿真环境museum.world。
1、机器人模型

机器人模型参见第六章: https://blog.csdn.net/weixin_42361804/article/details/106015809,这里做了一个简单的修改,去掉了kinect相机,将rplidar激光雷达放在了最上方,由于建立的是二维地图,kinect相机的作用不大,所以一个激光雷达已经足够了。
2、robot_rplidar_nav.launch
<launch>
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find robot_gazebo)/worlds/museum.world"/>
<!--arg name="world_name" value="$(find robot_gazebo)/worlds/room.world"/-->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find robot_description)/urdf/robot_kinect_rplidar.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model robot -param robot_description"/>
</launch>
此launch文件用来加载机器人模型和仿真环境,并发布机器人的关节状态和tf坐标变换,在此文件中可以修改对应的world文件。
3、robot in room

4、robot in museum
第二题
1、使用gmapping算法建图
(1)gmapping_demo.launch
<launch>
<include file="$(find robot_navigation)/launch/gmapping.launch"/>
<!-- 启动rviz -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find robot_navigation)/rviz/gmapping.rviz"/>
</launch>
此launch文件嵌套了一个gmapping.launch文件,并启动了rviz。
(2)gmapping.launch
<launch>
<arg name="scan_topic" default="scan" />
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen" clear_params="true">
<param name="odom_frame" value="odom"/>
<param name="map_update_interval" value="5.0"/>
<!-- Set maxUrange < actual maximum range of the Laser -->
<param name="maxRange" value="5.0"/>
<param name="maxUrange" value="4.5"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.5"/>
<param name="angularUpdate" value="0.436"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="80"/>
<param name="xmin" value="-1.0"/>
<param name="ymin" value="-1.0"/>
<param name="xmax" value="1.0"/>
<param name="ymax" value="1.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>
此launch文件只运行了一个slam_gmapping节点,并配置了一些参数。
(3)建图
roslaunch robot_gazebo robot_rplidar_nav.launch
roslaunch robot_navigation gmapping_demo.launch
roslaunch robot_teleop robot_teleop.launch
在robot_rplidar_nav.launch可以修改对应的world文件。
room
建图过程:

建好的地图:
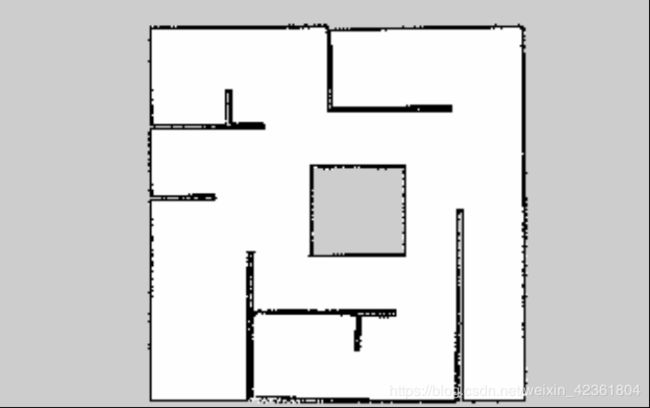
可以看到这个地图并不是那么好看,这是由于算法的局限性(电脑性能)和传感器信息的单一性导致的。一种方法可以通过调节参数来改进,比如gmapping.launch文件中的iterations和particles两个参数,其中iterations表示点云配准时迭代的次数,迭代次数越多点云配准得就越精确,particles表示粒子滤波中粒子的数量,粒子的数量越多定位建图越精确,此外还可以修改激光雷达的扫描频率,rplidar.xacro文件中的
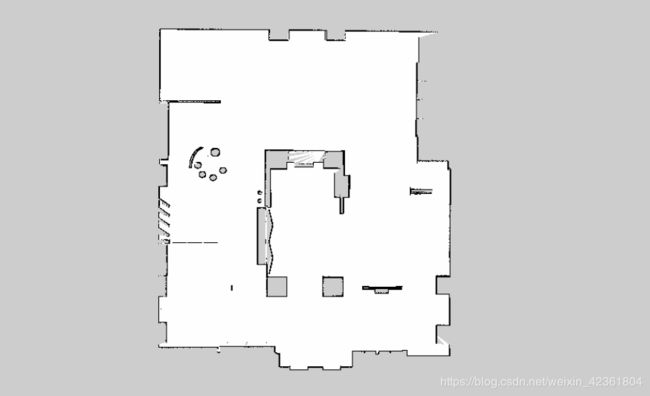
museum
建图过程:
建好的地图:
2、使用hector算法建图
(1)hector_demo.launch
<launch>
<include file="$(find robot_navigation)/launch/hector.launch"/>
<!-- 启动rviz-->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find robot_navigation)/rviz/gmapping.rviz"/>
</launch>
此launch文件嵌套了一个hector.launch文件,并启动了rviz。
(2)hector.launch
<launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_height_mapping" output="screen">
<!--Frame names-->
<param name="pub_map_odom_transform" value="true"/>
<param name ="map_frame" value ="map"/>
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="odom" />
<!--TF use-->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!--mapsize /start point-->
<param name="map_resolution" value="0.025"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5"/>
<param name="laser_z_min_value" value="-1.0"/>
<param name="laser_z_max_value" value="1.0"/>
<param name="map_multi_res_levels" value="2"/>
<param name="map_pub_period" value="1"/>
<param name="laser_min_dist" value="0.4"/>
<param name="laser_max_dist" value="5.5"/>
<param name="output_timing" value="false"/>
<param name="pub_map_scanmatch_transform" value="true"/>
<!--map update parameter-->
<param name="update_factor_free" value="0.45"/>
<param name="update_factor_occupied" value="0.7"/>
<param name="map_update_distance_thresh" value="0.1"/>
<param name="map_update_angle_thresh" value="0.05"/>
<!--Advertising config-->
<param name="scan_topic" value="scan" />
<param name="advertise_map_service" value="true"/>
<param name="map_with_known_poses" value="false"/>
<param name="scan_subscriber_queue_size" value="5"/>
</node>
<!-- Move base -->
<include file="$(find robot_navigation)/launch/include/move_base.launch.xml"/>
</launch>
此launch文件只运行了一个hector_mapping节点,并配置了一些参数。
(3)建图
roslaunch robot_gazebo robot_rplidar_nav.launch
roslaunch robot_navigation hector_demo.launch
roslaunch robot_teleop robot_teleop.launch
在robot_rplidar_nav.launch可以修改对应的world文件。
room
hector算法相比gmapping算法而言,在建图过程中非常容易发生漂移,尤其是在转弯的时候。
建图过程:
转弯时速度太快而发生漂移:
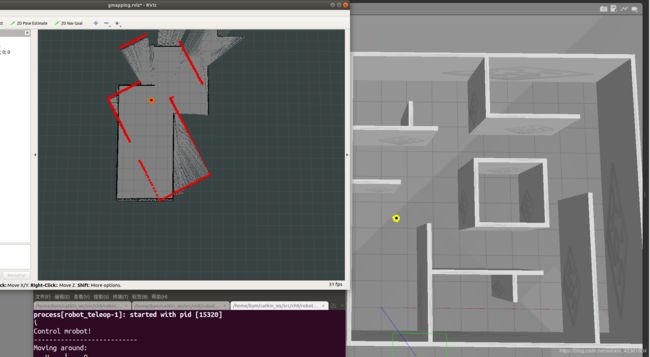
所以使用hector算法建图时机器人的速度一定要非常慢,尤其是在转弯的时候。hector算法也可以通过调节参数来提高地图精度和鲁棒性,例如hector.launch文件中的map_resolution和map_size两个参数,map_size表示地图的大小,建立的地图中的点数为map_size*map_size,map_resolution表示地图中每一小方块代表的尺寸大小。除了提高地图分辨率之外,还可以修改激光雷达的扫描频率,rplidar.xacro文件中的
meseum
建图过程:
建好的地图:
