室内定位方法总结
室内定位方法总结
- 无线定位
- 1.WiFi定位
- 三边定位算法
- 2.蓝牙定位
- 3.惯性传感器定位(加速度传感器、陀螺仪等)
- PDR算法
- 4.地磁
- 5.声波
- 图像定位
- 1.图像匹配
- 2.图像指纹
- 主要室内定位方法对比
无线定位
1.WiFi定位
wifi实时定位是利用现有的无线网络,配合WIFI标签和相关的移动终端设备比如WIFI手机,PDA,笔记本电脑等,再结合相应的定位算法,来确定相关人员和物品位置的一种新技术.
工作原理:
在无线局域网覆盖的地方,由人身上的相关移动设备(WiFi标签)发出信号,无线局域网访问点(AP)接收到信号后,将信号传送给定位服务器。定位服务器根据信号的强弱或信号到达时差判断出人员的位置,并通过电子地图显示具体位置。
原理图:

WiFi定位的误差一般较大,需与其它方式结合
三边定位算法
基本原理
Trilateration(三边测量)是一种常用的定位算法:
已知三点位置 (x1, y1), (x2, y2), (x3, y3)
已知未知点 (x0, y0) 到三点距离 d1, d2, d3
以 d1, d2, d3 为半径作三个圆,根据毕达哥拉斯定理,得出交点即未知点的位置计算公式:
( x 1 − x 0 ) 2 + ( y 1 − y 0 ) 2 = d 12 ( x_{1} - x_{0} )^2 + ( y_{1} - y_{0} )^2 = d_{12} (x1−x0)2+(y1−y0)2=d12
( x 2 − x 0 ) 2 + ( y 2 − y 0 ) 2 = d 22 ( x_{2} - x_{0} )^2 + ( y_{2} - y_{0} )^2 = d_{22} (x2−x0)2+(y2−y0)2=d22
( x 3 − x 0 ) 2 + ( y 3 − y 0 ) 2 = d 32 ( x_{3} - x_{0} )^2 + ( y_{3} - y_{0} )^2 = d_{32} (x3−x0)2+(y3−y0)2=d32

设未知点位置为 (x, y), 令其中的第一个球形 P1 的球心坐标为 (0, 0),P2 处于相同纵坐标,球心坐标为 (d, 0),P3 球心坐标为 (i, j),三个球形半径分别为 r 1 , r 2 , r 3 r_{1}, r_{2}, r_{3} r1,r2,r3,z为三球形相交点与水平面高度。则有:
r 1 2 = x 2 + y 2 + z 2 r_{1}^2 = x^2 + y^2 + z^2 r12=x2+y2+z2
r 2 2 = ( x − d ) 2 + y 2 + z 2 r_{2}^2 = (x - d)^2 + y^2 + z^2 r22=(x−d)2+y2+z2
r 3 2 = ( x − i ) 2 + ( y − j ) 2 + z 2 r_{3}^2 = (x - i)^2 + (y - j)^2 + z^2 r32=(x−i)2+(y−j)2+z2
当z=0时,即为三个圆在水平面上相交为一点,首先解出 x:
x = r 1 2 − r 2 2 + d 2 2 d x = \frac{r_{1}^2 - r_{2}^2 + d^2 }{ 2d} x=2dr12−r22+d2
将公式二变形,将公式一的 z 2 z^2 z2 代入公式二,再代入公式三得到 y 的计算公式:
y = r 1 2 − r 3 2 − x 2 + ( x − i ) 2 + j 2 2 j y = \frac{r_{1}^2 - r_{3}^2 - x^2 + (x - i)^2 + j^2} { 2j} y=2jr12−r32−x2+(x−i)2+j2
2.蓝牙定位
蓝牙定位基于RSSI(ReceivedSignalStrengthIndication,信号场强指示)定位原理。根据定位端的不同,蓝牙定位方式分为网络侧定位和终端侧定位。
原理:
1)首先在区域内铺设beacon和蓝牙网关。
2)当终端进入beacon信号覆盖范围,终端就能感应到beacon的广播信号,然后测算出在某beacon下的RSSI值通过蓝牙网关经过wifi网络传送到后端数据服务器,通过服务器内置的定位算法测算出终端的具体位置。终端侧定位系统由终端设备(如嵌入SDK软件包的手机)和beacon组成。其具体定位原理如下:
先在区域内铺设蓝牙信标,beacon不断的向周围广播信号和数据包,当终端设备进入beacon信号覆盖的范围,测出其在不同基站下的RSSI值,然后再通过手机内置的定位算法测算出具体位置。
蓝牙定位的优势在于实现简单,定位精度和蓝牙信标的铺设密度及发射功率有密切关系。并且非常省电,可通过深度睡眠、免连接、协议简单等方式达到省电目的。但是蓝牙定位需要事先设置好其工作的环境,如果工作环境不足以支持铺设必要的环境,则无法运用该功能。使用蓝牙的精度会比WiFi高一些
3.惯性传感器定位(加速度传感器、陀螺仪等)
PDR算法
步行者航位推算(Pedestrian Dead Reckoning,PDR)是对步行者行走的步数、步长、方向进行测量和统计,推算出步行者行走轨迹,和位置等信息
主要是在无信标环境下使用惯性测量单元(Inertial Measurement Unit,IMU)感知人员在行进过程中的加速度、角速度、磁力和压力等数据,并利用这些数据对行进人员进行步长与方向的推算,从而达到对人员进行定位跟踪的目的,其中主要涉及的过程有步态检测、步长和方向计算。
PDR原理图:

PDR初始条件:已知初始位置S0(N0,E0)
{ E k = E 0 + ∑ n = 1 k d n s i n θ n N k = N 0 + ∑ n = 1 k d n c o s θ n \left\{ \begin{aligned} E_{k}=E_{0}+\sum_{n=1}^{k}d_{n}sin\theta_{n} \\ N_{k}=N_{0}+\sum_{n=1}^{k}d_{n}cos\theta_{n} \\ \end{aligned} \right. ⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧Ek=E0+n=1∑kdnsinθnNk=N0+n=1∑kdncosθn
根据推算公式,可以得出任意时刻k的位置Sk(Nk,Ek)。
该方法的不足在于由于实现十分精准的步长检测和方向的推算十分困难,一般都有误差,所以在定位时错误会逐步积累
4.地磁
处于地球近地空间内的任一点都具有磁场,且其强度和方向会随着不同经纬度和高度的不同而不同,同时磁性物质也会对磁场的结构有影响,现代的建筑大多都是混凝土结构,这会在局部空间上弯曲地磁场,但在时间上是稳定的,为具有一定的独特性,这样就可以利用不同空间磁场的差异来定位
5.声波
超声波定位主要采用反射式测距法,通过多边定位等方法确定物体位置,系统由一个主测距器和若干接收器组成,主测距仪可放置在待测目标上,接收器固定于室内环境中。定位时,向接收器发射同频率的信号,接收器接收后又反射传输给主测距器,根据回波和发射波的时间差计算出距离,从而确定位置。
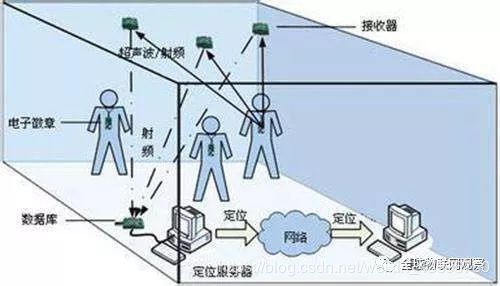
超声波定位整体定位精度较高,结构简单,但超声波受多径效应和非视距传播影响很大,且超声波频率受多普勒效应和温度影响,同时也需要大量基础硬件设施,成本较高。
图像定位
1.图像匹配
2.图像指纹
主要室内定位方法对比
| 定位方法 | 描述 | 应用案例 | 特点 |
|---|---|---|---|
| 邻近探测法 | 通过一些有范围限制的物理信号的接收,从而判断移动设备是否出现在某一个发射点附近。 | 基站定位 | 操作简单,精度不高,依赖参考点分布密度 |
| 质心定位法 | 根据移动设备可接收信号范围内所有已知的信标位置,计算其质心坐标作为移动设备的坐标 | 基站定位 | 精度不高,依赖参考点分布密度 |
| 多边定位法 | 通过测量待测目标到已知参考点之间的距离,从而确定待测目标的位置。 | 超声波 | 精度高,应用广 |
| 极点法 | 测量相对某一已知参考点的距离和角度从而确定待测点的位置 | 激光扫描 | 测量简单,精度高,应用不广 |
| 指纹定位 | 在定位空间中建立指纹数据库,通过将实际信息与数据库中的参数进行对比来实现定位 | 地磁 | 精度高,前期工作大,不适合环境变化区域 |
| 航位推算法 | 根据预先确定的位置、估计或已知的速度和时间来估计当前的位置 | 惯性导航 | 数据稳定,无依赖,误差随时间积累 |
参考原文:
https://blog.csdn.net/chengde6896383/article/details/76474358
https://wenku.baidu.com/view/56314bcd77232f60ddcca1f0.html
http://m.elecfans.com/article/586741.html?fromtype=app