kinect 2的数据获取与深度相机的标定
我需要通过kinect 2获取深度信息 ,进而转化为点云进行点云预处理实现实时三维重构,获取深度相机的内参有利于提高三维重建的精度。要想获取kinect深度相机的内参,首先必须获取深度相机拍摄的图像,由深度相机拍摄的图像有深度图和红外图两种,深度图难以识别,所以我需要过去kinect的红外数据。(kinect 2里面有两个摄像头,一个是彩色相机,一个是深度相机,由于我只需要深度数据所以我只标定深度相机。)
标定原理:张正友标定法原理
标定工具:Matlab
1 Kinect数据获取
数据获取我参考了一位博主的代码,原博客链接:https://blog.csdn.net/jiaojialulu/article/details/53087988
该博客写得非常详细,代码完整,可以直接运行(为了能够保存红外图片,程序我在原基础上加了一行)。
1.1六种数据源
Kinect Data Sources – 6种数据源
- ColorFrameSource
彩色图 - InfraredFrameSource
红外图(16-bit) - DepthFrameSource
深度图(16-bit,单位:mm)
kinect采的深度数据是short型,即每个像素深度占2个字节,但是16位中只有12位是有用的,2^12 = 4096,单位是毫米,所以范围是4m - BodyIndexFrameSource
人物索引图(用一个字节代表人体,最多支持6个人体) - BodyFrameSource
人体关节图 - AudioSource
声音
1.2完整代码
#include "kinect.h"
#include (depthData[i] % 256);
// reinterpret_cast(i_depth.data)[i] = intensity;
//}
// 实际是16位unsigned int数据
hr = m_pDepthFrame->CopyFrameDataToArray(424 * 512, reinterpret_cast<UINT16*>(i_src_depth.data));
}
// infrared拷贝到图片中
if (SUCCEEDED(hr))
{
hr = m_pInfraredFrame->CopyFrameDataToArray(424 * 512, reinterpret_cast<UINT16*>(i_ir.data));
}
Mat i_rgb_resize = i_rgb.clone(); // 缩小方便看
cv::resize(i_rgb_resize, i_rgb_resize, Size(512, 424));
// 显示
imshow("rgb", i_rgb_resize);
if (waitKey(1) == VK_ESCAPE)
break;
imshow("i_src_depth", i_src_depth);
if (waitKey(1) == VK_ESCAPE)
break;
imshow("ir", i_ir);
if (waitKey(1) == VK_ESCAPE)
break;
imwrite("D:\\Document\\biaoding\\infrared20.tif", i_ir);//红外图保存路径吗,这个写入图片需要自己拍一张更改一下图片序号
// 释放资源
SafeRelease(m_pColorFrame);
SafeRelease(m_pDepthFrame);
SafeRelease(m_pInfraredFrame);
SafeRelease(m_pColorFrameReference);
SafeRelease(m_pDepthFrameReference);
SafeRelease(m_pInfraredFrameReference);
SafeRelease(m_pMultiFrame);
}
// 关闭窗口,设备
cv::destroyAllWindows();
m_pKinectSensor->Close();
std::system("pause");
return 0;
}
上面这个程序能获取彩色图、深度图和红外图三个种数据类型,我只保存红外图。
2 用openCV自制标定板
参考博客:https://blog.csdn.net/weixin_43053387/article/details/84957042
该博主生成的标定板没达到一边奇数一边偶数的要求(一边奇数一边偶数才能定位准确),我做了简单的修改,代码如下。
#include 
3 用matlab标定
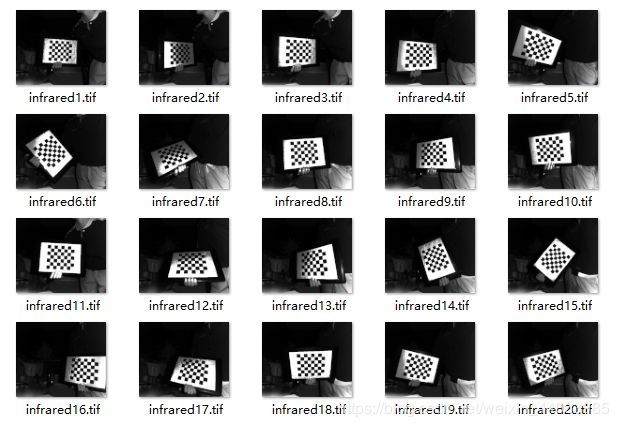
(1)用上面程序获得20张不同角度不同距离的红外照片
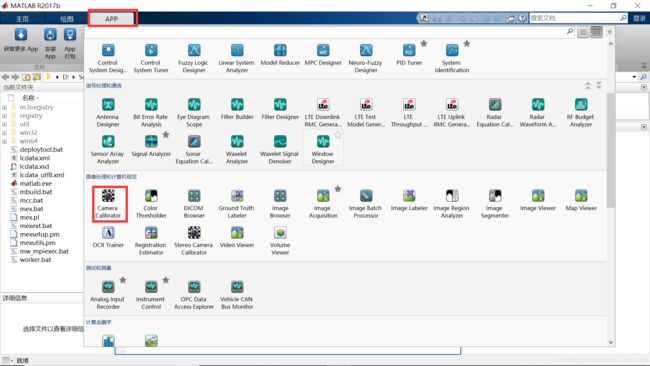
(2)打开matlab,app>>camera calibrator
(3)将你获得的图片导入matlab中去

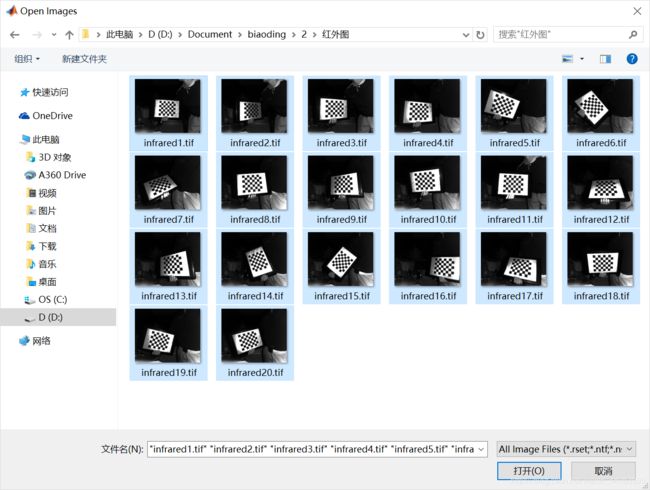
这步可能会出现自动删除失真严重的图片,确认就行。
(4)确定每个格子的边长,单位;我的时25mm。

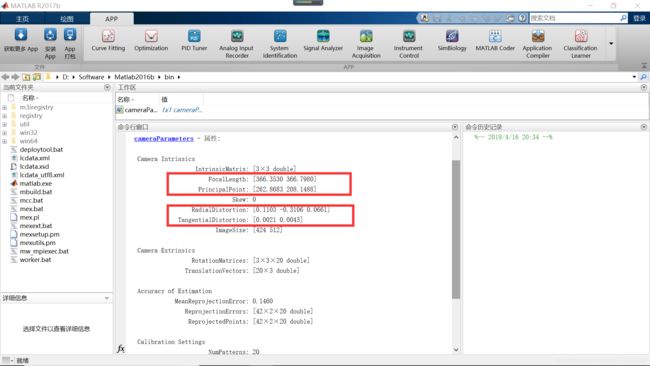
(5)选择三个径向畸变量和切向基变量,如下图所示,再点击校准。

(6)计算

(7)得到焦距(单位:像素)、主点(单位:像素)、畸变系数(无量纲)等多个参数