多发射数据通路-CA
文章目录
- 乱序执行的关键技术
- 指令级并行的关键技术
- 动态调度技术
- 动态调度流水线数据通路
- 保留站的组织(指令缓存结构)
- 寄存器与保留站的关系---读取寄存器值的时机
- 寄存器重命名方法
- 硬件重命名的分类
- 具体应用
- 常见处理器的数据通路
- 乱序执行的数据通路
- 数据通路类型
- 常见处理器的数据通路(早期)
- 常见处理器的数据通路(最近)
- Intel最近处理器的队列大小
- 多发射结构数据通路
- 多发射的情况
- 多发射时的寄存器重命名
- 多发射的其它设计问题
- 龙芯2号多发射结构简介
- 龙芯2号数据通路
- 龙芯2号处理器核结构图
- 龙芯2号指令流水线
- 寄存器重命名
- 重命名主要通路
- 发射队列
- Reorder队列
乱序执行的关键技术
指令级并行的关键技术
- 指令流水线: 时间重叠
- 多发射: 空间重复
- 乱序执行(有序结束): 充分利用资源
• 动态调度:前面指令因相关而等待时,后面的可继续前进。
• 转移猜测:在转移条件确定前,猜测某个分支取指并执行
• 非阻塞访存:提高访存指令执行效率,减少访存阻塞
• 乱序执行可以提高性能1.5-2倍。
动态调度技术
(1)动态调度的主要作用及其思想:
有序进入、乱序执行、有序结束
- 把读寄存器从译码中区分开来,并利用保留站等指令缓存技术避免前面的阻塞的指令影响后面指令的执行;
- 通过ROB对执行完的指令重新排序实现有序结束;
- 利用寄存器重命名技术保存未提交的临时结果,消除WAW和WAR相关并支持猜测性执行;
(2)影响动态调度的主要因素:
①指令缓存的结构:
• 独立保留站
• 组保留站
• 全局保留站
②读取寄存器内容的时间:
• 保留站前读
• 保留站后读
③寄存器重命名的方法:
• 重命名寄存器和物理寄存器分开
• 重命名寄存器和物理寄存器合并
动态调度流水线数据通路
保留站的组织(指令缓存结构)
比较:数据通路复杂度(结果总线传送)、保留站项数、保留站效率、发射复杂度
(1)独立保留站:每个功能部件一个保留站
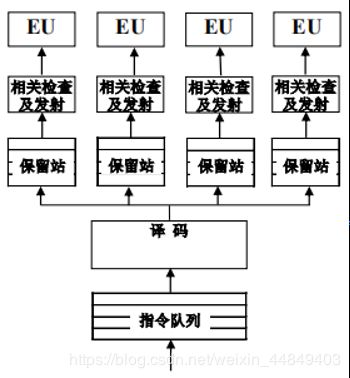
> 每个保留站项数较少(2-4项),只要一个写入端口一个读出端口,输出选择比较简单;
> 保留站利用率低,可能忙的忙死甚至引起堵塞,闲的闲死;
> 结果总线送到所有保留站,连线长,结果写回可能需要单独一拍;
- CDC6600每个EU一项保留站;
- IBM360/91中浮点加减部件两项,浮点乘法部件3项保留站;
- PowerPC 620三个定点一个浮点部件每个两项保留站;
- 龙芯1号三个定点两个浮点部件每个两项保留站;
(2)分组保留站:同组的功能部件共享保留站
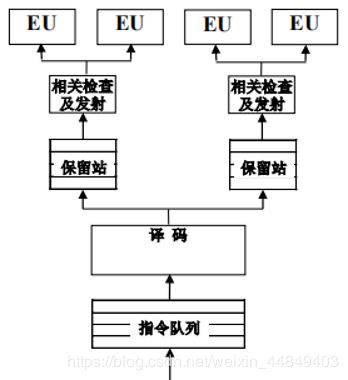
> 每个保留站项数较多,每个保留站需要多个写入端口多个读出口,保留站读出可能需要单独一拍;
> 保留站效率较高;
> 结果总线不用送到每个功能部件;
- 一般划分时考虑定点、浮点、访存;
- R10000定点、浮点、访存各16项 • Alpha 21264定点20项、浮点15项
- PA8700运算和访存各28项,还起到ROB作用
- Godson-2采用组保留站
(3)全局保留站:所有功能部件共享保留站

> 保留站项数很多,读出写入端口都很多,保留站读出时间长,保留站控制很复杂
> 保留站效率很高
> 结果总线只送到全局保留站
- Pentium Pro的全局保留站有20项
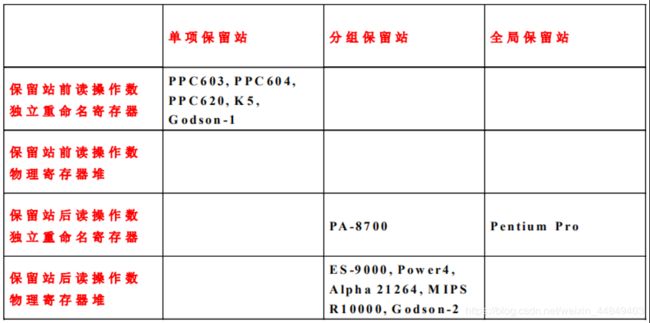
(4)不同处理器的保留站组织:
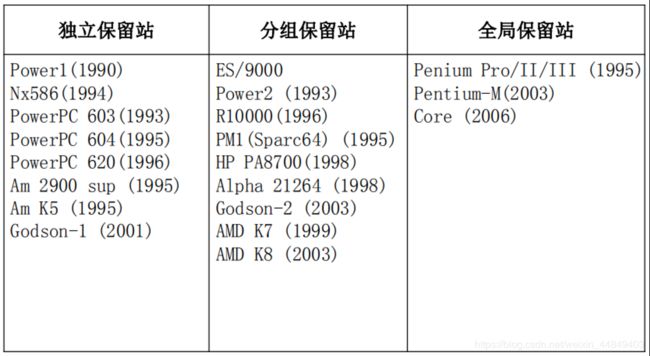
(5)不同处理器的保留站总项数比较:

寄存器与保留站的关系—读取寄存器值的时机
(1)保留站前读寄存器:寄存器的输出作为保留站的输入

• 操作数没准备好就读寄存器,保留站侦听结果总线获取没写回的值
• 有序发射:有序读寄存器
• 保留站中值的来源:寄存器、重命名寄存器、进入保留站时侦听、进入保留站后侦听
• 保留站中有值域,较复杂
• 寄存器读端口数为发射宽度
(2)保留站后读寄存器:保留站的输出作为寄存器的输入

• 保留站确信所有值都已经准备好后再读寄存器,有可能有Forward的情况
• 乱序发射:乱序读寄存器
• 保留站中无值域,较简单
• 寄存器读端口数为相应功能部件数
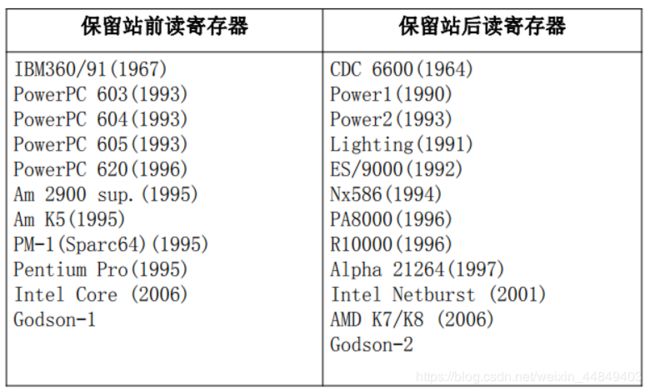
(3)保留站前(后)读寄存器的处理器比较:
似乎保留站后读寄存器占了上风
寄存器重命名方法
(1)双重作用:
• 例外或转移猜测错误时取消后面操作
• 解决WAR和WAW相关
(2)核心思想:
• 一个操作写寄存器时重命名到其他寄存器
• 一个操作结束时再写到结构寄存器
(3)重命名方法多种多样,不拘一格—总之只要找到一个地方临时放一下数据
① 软件寄存器重命名:

② 重命名到保留站:

③ 重命名到ROB:

④ 重命名到发射队列:

⑤建立逻辑寄存器到物理寄存器的映射:

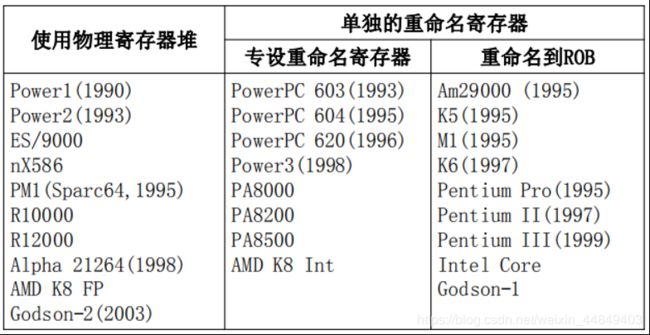
硬件重命名的分类
(1)重命名寄存器和结构寄存器分开:
• 重命名到保留站、ROB、专门的重命名寄存器、发射队列
(2)重命名寄存器和结构寄存器不分开:
• 为每个逻辑寄存器动态分配物理寄存器,需要建立逻辑寄存器和物理寄存器之间的映射表。
• 映射表可以是RAM(多逻辑 → 单物理)的方式,即有逻辑寄存器那么多项,也可以是CAM(单逻辑→多物理)的方式,即有物理寄存器那么多项。
具体应用
(1)独立重命名寄存器的重命名算法:
1)描述:假设保留站前读寄存器
-
译码阶段
- 为目标寄存器分配一个空闲的重命名寄存器
- 为源寄存器找到相应的重命名或结构寄存器号
- 读操作数(注意三种操作数来源)并送入保留站 -
发射阶段
- 在保留站中找操作数准备好的操作进行运算,不涉及重命名 -
执行阶段
- 执行结果写回到重命名寄存器
- 写回到侦听该重命名寄存器值的保留站
- 不写回结构寄存器 -
提交阶段
- 把重命名寄存器的值写回到相应的结构寄存器
- 释放相应的重命名寄存器 -
转移猜错或例外
- 取消后面的已经建立的重命名关系
- 把结构寄存器的状态都置为有效
- 把重命名寄存器的状态都置为空 -
重命名寄存器的状态
- EMPTY:表示该寄存器没有被重命名(重命名后又已经被释放)
- MAPPED:表示已经被重命名但结果没有写回
- WRITEBACK:表示结果已经写回重命名寄存器但没有Commit到结构寄存器 -
结构寄存器的状态
- VALID:表示相应寄存器的值可用
- INVALID:表示相应寄存器的值不可用 -
映射关系
- 可在结构寄存器中增加一个指向重命名寄存器的重命名寄存器号域2)图示:

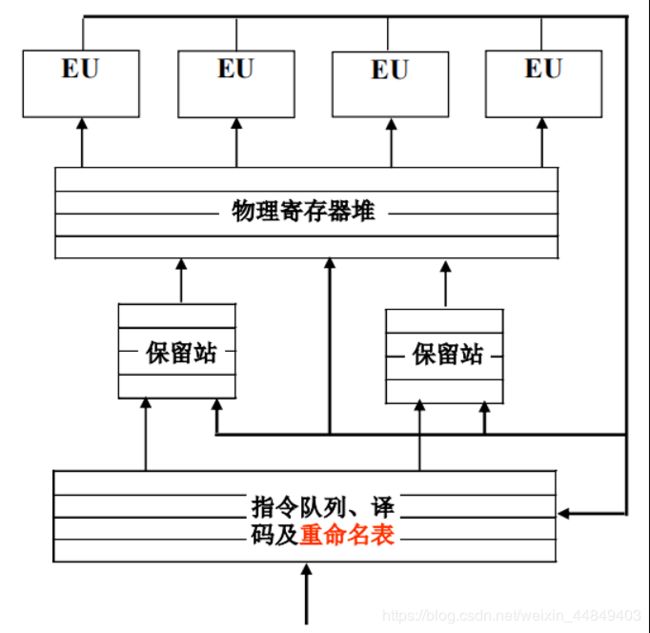
(2)使用物理寄存器堆的重命名算法:
1)描述:假设保留站后读寄存器
-
译码阶段
- 把目标寄存器映射到一个空闲的物理寄存器
- 为源寄存器根据依赖关系找到相应的物理寄存器号
- 把重命名后的寄存器号写入保留站 -
发射阶段
- 判断所需的操作数是否已经准备好,或(Forwarding情况下)正在写回
- 从物理寄存器或结果总线中读寄存器的值 -
执行阶段
- 执行结果根据目标物理寄存器号写回到物理寄存器
- 不用写回到保留站 -
提交阶段
- 修改重命名表确认目标寄存器的重命名关系
- 释放老的目标寄存器重命名关系 -
转移猜错或例外
- 修改重命名表取消后面的已经建立的重命名关系
- 把状态为MAPPED或WRITEBACK的都置为EMPTY
- 确认状态为COMMIT的映射为相应逻辑寄存器的最新映射
-
2)核心是重命名表
- 可以用CAM或RAM的方法,以CAM的方法为例
- 项数与物理寄存器一样
-
3)主要包括三个域 -
name:相应的逻辑寄存器号
-
state:状态,
- EMPTY:表示该寄存器没有被重命名(重命名后又已经被释放);
- MAPPED:表示已经被重命名但结果没有写回;
- WRITEBACK:表示结果已经写回重命名寄存器但没有Commit到结构寄存器;
- COMMIT:表示结果已经被确认 -
valid:在一个逻辑寄存器对应多个物理寄存器的情况下表示最新映射
4)图示:
(3)不同处理器的重命名方法:
UltraSparc没有使用寄存器重命名
常见处理器的数据通路
乱序执行的数据通路
(1)三方面考虑:
• 保留站结构(独立、分组、全局)
• 读操作数时机(译码:先读寄存器再保留站、发射: 先保留站再寄存器)
• 重命名方式(重命名寄存器与结构寄存器分开、不分开)
(2)因此一共有12种组合;
数据通路类型
常见处理器的数据通路(早期)

常见处理器的数据通路(最近)



Intel最近处理器的队列大小

多发射结构数据通路
多发射的情况
(1)数据通路变宽:
• Alpha21264:取指4条,发射6条,写回6条,Commit 11条
• 寄存器读端口变多
• 访存端口要求也增加,如Alpha有两个访存部件,通过倍频实现
(2)同一拍发射的指令之间的相关:
• 如在重命名阶段发生同一拍之间的相关
(3)流水线复杂度与发射宽度成平方关系:
• 如发射队列(保留站)变大*(读端口变多+侦听端口变多)
• 如寄存器重命名端口变多*同一拍重命名指令相关
多发射时的寄存器重命名
假设开始时与逻辑寄存器R1,R2,R3对应的最近的物理寄存器分别为PR1,PR2,PR3, 在同一拍中对如下指令进行寄存器重命名:

多发射的其它设计问题
(1)同时提交多条指令:
• 重命名把有序变成无序,要除了“前后看”,还要“左右看”;
• 提交把无序变成有序,也要“左右看”:同一拍可以提交多条,第二条是否提交要看第一条是否提交等;
(2)指令发射和读寄存器:
• 多端口寄存器是物理设计的难点:会增加延迟、面积、功耗,四发射结构一般至少需要四写八读的寄存器堆;
• 指令发射逻辑:从保留站中同时找出多条数据准备好的指令,为了性能要适当考虑在数据准备好的情况下前面的指令先发射;
(3)多功能部件:
• 增加回端口:寄存器堆、重命名寄存器表、ROB、发射队列
• 尤其是多访存部件会大大增加设计复杂度
龙芯2号多发射结构简介
龙芯2号数据通路
- 组保留站:定点、浮点
- 保留站后读操作数
- 物理寄存器堆
龙芯2号处理器核结构图

龙芯2号指令流水线
- 取指:根据程序计数器(PC)来访问指令Cache和指令TLB,如果TLB和Cache命中,就从指令Cache中取四条指令到指令寄存器
- 预译码:对分支指令进行转移猜测
- 译码:指令寄存器里的四条指令被译码成处理器内部指令格式
- 寄存器重命名:为每个逻辑目标寄存器分配一个物理寄存器,并且将逻辑源寄存器重命名为该寄存器最新映射的物理寄存器
- 调度:重命名后的指令被调度到定点或者浮点保留站中等待执行,同样也送到重排序队列(ROQ)中以保证按序完成,分支指令和访存指令还分别发送到分支队列和访存重排序队列
- 发射:从定点或浮点保留站中选取操作数都准备好的指令并发射,操作数没有准备好的指令在保留站侦听结果总线和前递总线
- 读寄存器:已发射的指令从物理寄存器堆中读取源操作数并发送到相应的功能单元
- 执行:根据指令要求进行运算,运算结果写回寄存器堆,并通知保留站和寄存器重命名表相应的物理寄存器已经写回,执行阶段可能需要多拍
- 提交:按照ROQ记录的程序顺序提交执行完的指令,每拍可提交四条指令,提交的指令送往寄存器重命名表用于确认它的目的寄存器的重命名关系并释放原来分配给同一逻辑寄存器的物理寄存器,送往访存队列允许那些提交的存数指令写入Cache 或内存
寄存器重命名
- 功能:
把逻辑寄存器号转化为物理寄存器号
消除WAR和WAW相关,建立RAW相关关系。 - 使用CAM寄存器重命名表,每项包括如下内容:
- State:四个状态EMPTY、MAPPED、WRITEBACK、COMMIT。
- Name:该物理寄存器对应的逻辑寄存器号。
- valid:在多个物理寄存器对应一个逻辑寄存器时表示哪个是最近被映射的。
- 其他。 - 操作:
- 重命名:为目标寄存器分配一个空闲物理寄存器(状态置为MAPPED),为源寄存器根据依赖关系找到相应的物理寄存器号。
- 执行:把重命名寄存器的状态置为WTBK 。
- 提交:把目标寄存器的值变成软件可见(把重命名寄存器的状态置为COMMIT),释放原来的重命名寄存器(状态置为EMPTY)。
- 转移猜错或例外:取消后面的已经建立的重命名关系
重命名主要通路

重命名逻辑随发射宽度的平方复杂度!
发射队列
- 定点和浮点队列分开,相当于分组保留站:
操作寄存器重命名后进入发射队列,取指和译码过程中发生例外的操作不进入发射队列 - 乱序发射:
对于每个功能部件每次在已经准备好可以发射的操作中找最早进入队列的进行发射,发射队列中增加age域 - 数据准备好的判断:
- 寄存器重命名阶段根据物理寄存器状态表判断该物理寄存器是否可用;
- 操作队列侦听有关有关功能部件的写回结果,把等待该结果的操作数置为有效; - 发射队列内容:
- fu: 执行该操作的功能部件号,全1表示空。
- roqid, brqid: Reorder队列和转移队列索引,写回时用。
- op: 操作码。
- pdest: 物理目标寄存器号。
- psrc1, psrc2: 物理源寄存器号。
- prdy1, prdy2: 源寄存器准备好标志。
- taken: 转移猜测结果,为1表示猜测跳转。
- imm: 定点队列为16位立即数。
- fmt: 辅助操作码,浮点队列时为5位fmt。
- age: 表示一个操作在操作队列中等待时间的长短。
- ……
Reorder队列
- 所有操作在重命名后到提交之前一直在ROQ中:
- 寄存器重命名后有序进入、乱序执行、有序结束
- ROQ还保存部分执行结果:如evzoui、例外、JR等 - 操作:
- 重命名:每次按序把重命名后的操作送入Reorder队列
- 写回:根据结果总线的roqid号修改相应操作的状态,执行过程中的例外写回ex和excode,浮点操作写回evzoui,JR和JALR写回PC。
- 提交:每次按序提交四个已写回的操作,例外操作不提交
- 形成例外总线:例外操作必须成为ROQ第一个操作才能形成例外总线 - ROQ的内容:
- state: EMPTY、MAPPED、BRWTBK和WTBK。
- op: 8位,操作码。
- odest: 7位,dest原来对应的物理寄存器
- pdest: 7位,物理目标地址寄存器。
- brqid: 转移队列号。
- evzoui: 6位,浮点操作的EVZOUI结果写到此域。
- ex: 1位,表示是否发生例外。
- excode: 6位,例外原因。
- brerr: 表示转移猜测错误。
- taken: 表示转移成功。
- c: 1位,用于保存浮点比较结果。
- bd: 1 位,表示是否为延迟槽操作。
- ……