ADAS系统长篇综述(下)
ADAS系统长篇综述(下)
四.ADAS架构设计的进化阶梯
前面谈到的产品的商业化推广渗透和产品的功能演进渗透,目的是让大家去概念化。当然,最后的赢家一定是实干者,能够在具体技术实现路径上进行深度耕耘。这就是本节要讨论的内容:技术供应和生态系统方面的思考。
毕竟ADAS是一个复杂的技术系统,要理解其中的核心矛盾本质,才能讲的清楚其演进趋势。做高度抽象的话,ADAS系统主要分解为三个核心能力:
§ 看得清(感知)
§ 算得动(算力)
§ 行得准(控制)
按照这个基本逻辑再往下讲ADAS架构的核心部件解析,分解剥洋葱,内部结构就会呈现,按照功能top-down分层为:
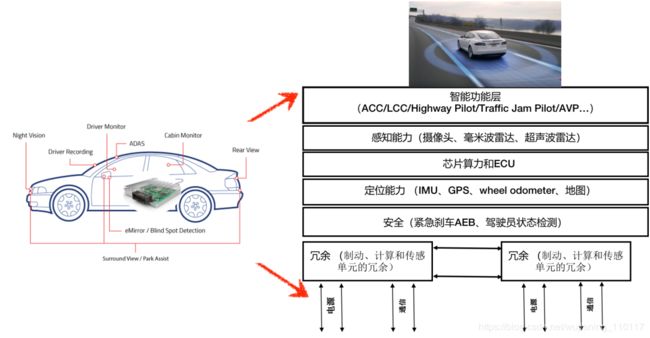
剥洋葱:ADAS系统架构和层次化分解
- 智能功能
- 传感能力(摄像头、雷达、超声波)
- 定位系统(IMU、GPS、轮速计、RTK、地图)
- 芯片算力
- 安全保底(紧急刹车AEB、驾驶员状态检测)
- 冗余(制动、转向、计算和传感单元的冗余)
继续,如果以上top-down分解可以看作是放大镜下的视角,进一步,我们还可以搬出显微镜,对系统架构实现方式进行更加具体的细分。但在这里我们却遇到了难题:站在不同的视角,甚至不同时期,你就会发现,系统的架构实现方式过于庞杂,远远超过上面剥洋葱的比喻。
然而,虽然架构五花八门,但总有一些进化的脉络存在。近期,我对行业主流架构进行了大量观察,并通过与诸多专家的交流,就找到这样一条相对清晰的架构进化树,不同代技术之间,显现出了量化的差异性。
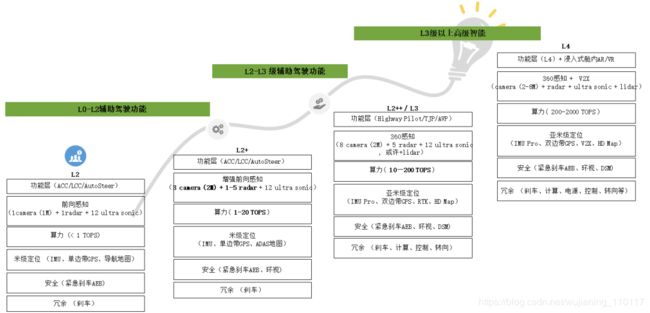
四代ADAS系统架构和核心部件演进图
第一代L2架构。其特点是:
§ 主推ACC、LCC、AutoSteer功能
§ 技术架构上采用前向感知系统
§ 通常包括1个百万像素左右的摄像头、1个前向毫米波雷达、12个超声波雷达可以做自动泊车和盲区检测
§ 算力平台在几百GOPS和1TOPS之间
§ 米级定位系统(常规IMU、导航GPS、导航地图)
§ 安全保底采用紧急刹车AEB;最好有刹车冗余。
典型案例:
§ Autopilot 1.0
第二代L2+架构。其特点是:
§ 主推ACC、LCC、AutoSteer功能,增强盲区检测、主动变道甚至红绿灯检测功能
§ 系统架构在感知和算力上做升级,比如在1.0的基础上升级感知系统为增强前向感知
§ 主流架构包括一个三目前向摄像头(比如30度左右窄视角、50度左右中视角、180左右度宽视角),三目摄像头是由Mobileye引入的视觉系统设计,在原来单目摄像头的基础上增加了一个远距离窄视角的摄像头用于长距离目标追踪和交通标志及地面障碍物的提前标识。同时还增加了一个近距离宽视角的摄像头用于探测周围的行人和汽车人。不仅通过不同视角给出更广泛的环境图像信息以做到多车道检测和十字路口信息检测等
§ 1-5个毫米波雷达,有些只采用前向雷达,有些产品同时采用4个角雷达,12个超声波雷达
§ 算力同步提升为1-20 TOPS
§ 定位定位硬件系统不变,精度米级,导航地图升级到ADAS地图
§ 安全层面可以考虑增加环视4个摄像头做到360环视
典型案例:
基于EyeQ3感知,< 1TOPS算力的系统:
§ Autopilot 1.0
§ Volvo Pilot Assist 3.0 (分离出去的Zenuity)
基于EyeQ4感知,2.5TOPS算力的系统:
§ GM Super Cruise 2.0
§ NIO Pilot
§ BMW X5
§
理想ONE
§ VW
§ FCA
§ Audi
§ 采用博世的奔驰、上汽、长安的XPilot 2.0等系统
第三代L2++/L3架构。其特点是:
§ 功能层面大的升级到高速自主驾驶、城市拥堵驾驶和自主泊车功能
§ 系统架构全方位大的升级,感知系统由前向增强感知升级为360感知
§ 采用8个摄像头,5个毫米波雷达和12个超声波雷达,个别产品甚至采用前向lidar,不管是摄像头还是毫米波都可以做到360无死角感知覆盖,实现双感知系统,最好感知系统之间还有一定的冗余关系,比如自动驾驶摄像头和环视摄像头互为冗余
§ 感知的提升需要算力的同步提升到20-200 TOPS
§ 高速自主驾驶做到主动变道需要定位系统至少是亚米级定位,升级为IMU Pro、双边带GPS、RTK和HDMap。随着新基建的推行,中国有可能是最先实现RTK量产使用的。关于GPS是单边带还是双边带,不同专家有不同意见,我个人倾向双边带,可靠性更强。
§ 安全层面包括AEB、360环视,增加驾驶员检测系统(DSM)来对驾驶功能做辅助,形成人+车智能闭环;冗余要求更高,增加计算和控制单元的冗余备份。
典型案例:
§ Autopilot hardware 2.0 (1R8V + 10 TOPS Nvidia Pascal)
§ Autopilot hardware 3.0(1R8V +144TOPS FSD)
§ XPilot 3.0(5R8V+30TOPS Nvidia Xavier)
§ Aion LX ADiGo(EyeQ4+ Lidar+5Radar+TI TDA4, 5R3V1L+10.5TOPS)
§ BMW iNext(2 EyeQ5 + 2 Intel Denverton CPU + Lidar + 4 Radar, 即5R6V1L+ 32TOPS)
§ Audi A8 (EyeQ3+Lidar+5 Radar+NVIDIA Tegra K1, 即5R3V1L+2TOPS)
注:上面我将浮点的FLOPS统一算为目前主流针对DNN有效的最大TOPS(比如将32位浮点计算能力转化为8比特整数计算算力)
第四代L4架构。其特点是:
§ 功能层做到特定场景L3或者L4,彻底解放人类的时间,浸入式智能全方位爆发到AR/VR的实现和其它消费类业务。
§ 感知系统上采用更高精度的摄像头比如800万像素,同时增加Lidar,除了单车智能,增加车路协同V2X和5G
§ 算力预测达200-2000 TOPS(2000TOPS是英伟达最新推出的安培架构GPU)
§ 亚米级定位系统
§ 安全冗余层面更加扎实,比如增加电源冗余等。这个层面的整套系统下来要达到几百瓦的功耗,很可能要采用水冷来保证系统的散热和可靠性。
典型案例:
还没有大规模量产的产品,参见各种L4-L5的无人驾驶车辆。
值得期待的有:
§ Volvo XC90 2022年版本,目标是高速公路全自动驾驶Highway Pilot(https://www.caranddriver.com/news/a32381082/volvo-xc90-autonomous-highway-pilot-future/)Volvo CTO Henrik
Green提到,“Volvo将会为驾驶负责,人类可以解放双手,双眼也无需盯着路面。我们会通过OTA逐步扩展自动驾驶的覆盖场景和区域,这是一个逐步的过程。”
§ BMW iNext Ultra (3 EyeQ5 + 24-core Intel Xeon CPU + 4 Radar +7 Camera + 5 Lidar, 系统配置还配备fallback和安全帽子系统,堪称奢华阵容)BMW计划在2021年启动一个500辆规模的无人驾驶车队,目标是L4甚至L5级无人驾驶,除此之外,在对外销售的乘用车上会实现L3。据说iNext整车售价高达8万美金,对标特斯拉高端品牌model S,不知道自动驾驶系统会售价几何,很期待!
英伟达的高端计算平台专门针对无人驾驶打造,第一代Drive PX Pegasus, 算力高达320TOPS(8比特算力), 功耗500瓦;最新推出的第二代Drive
AGX Orin算力高达2000TOPS(8比特算力),
功耗高达750瓦。妥妥的小型服务器穿上了汽车的外衣,就是平时大家说的电脑加轮子吧。
ADAS家族的丰富性和异构性,在此已经展现得淋漓尽致——在ADAS的动物世界里,没有标准答案,更像是一场在成本把控和差异化之间的平衡和角逐。
在追求智能体验的驱使下,高端产品设计依然在奢侈豪华技术阵容里面带头奔跑,验证了智能车将会作为一个新型技术平台支撑起ADAS技术生态的演进。
五.Q&A:ADAS设计核心问题
问:Fall back理念指什么?
i.系统设计需要有一定的层级概念,按照我们的安全帽层+孩童层+高级智能进阶,在成本允许的情况下,最好不同层有不同的硬件子系统支持,才能达到安全性和可靠性最大化。
ii.高级智能建立在安全保底的基础上,高级智能遇到意外和故障时,降级到低级孩童智能层上,最终由满足NCAP的底层系统作为安全保底层。
iii.最新出炉的BMW iNext系统设计提供了很好的设计案例。
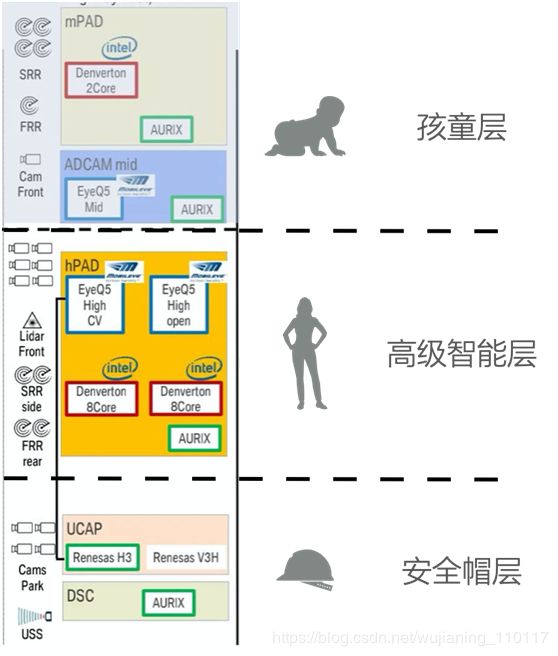
BMW iNext的L3系统的智能分级和fallback冗余机制
问:如何理解可伸缩的系统架构?
i.整车设计通常讲究中高低配置,不同配置的价格、功能不同,ADAS作为其中的一个关键功能模块,大部分整车项目还是要求有中高低配置之分,这就要求ADAS架构设计有可伸缩的能力:自动驾驶系统的算力、传感器数等可适当“减配”。
ii.华为在他们的架构设计中运用了此概念,并由高端开始设计,可删减为低端系统。
问:如何选择摄像头参数?
i. Bayer模式,RCCC低光度好,但是色彩不够,红绿灯看不见;RCCB在低光和色彩中是个平衡;RGGB,低光度最差。不同的摄像头根据功能需求采用最合适的Bayer模式。
ii. 像素,分前向和侧向不同,目前的业界主流前向在由100万进化到200万,未来两年像素依然会增加。根据功能需求来计算自己的系统需要的像素,比如需要看200米,根据AI算法每个物体至少需要20*20个像素的经验值,换算出来所需像素。从实用的角度200万像素对于L2+和L2++足够了。RoboTaxi也许会采用更高分辨率,比如800万像素,这些高端摄像头可以灵活配置以满足全场景的识别需要,比如用像素换取更高性特殊光照下的成像性能。
iii. 长宽比,16:9 和4:3是常见配置,理论上根据自己不同系统之间的一致性来最合适,比如上代采用了16:9,后代依然延续。这样大数据能够延续,上一代积累下一代需要的粮食,保证研发需求和大数据正向积累。
问:双目视觉感知系统怎么样?
双目指通过两个摄像头一起工作,在感知系统上增加检测距离信息的目的,通常日本斯巴鲁和德系奔驰最喜欢双目系统。近几年由于以Mobileye为首的供应商采用了三目一体的感知解决方案,获得了比双目更加丰富的环境信息;再加上以特斯拉为代表的采用AI算法通过刷海量数据达到了很好的效果,感觉双目已经慢慢成为小众方向了。
问:要不要采用Lidar?
i. Lidar我并不是专家,我的理解为:目前任何一个单一传感器都有局限,基于视觉的感知方案可能在有些场景的三维信息计算上会有些不完善,采用Lidar能够在视觉+毫米波雷达的基础上,将感知的信息精度和三维信息进一步提升,比如由2σ(97.73%)提升到3σ(99.87%)。所以高端奢侈品牌会通过增加Lidar用成本场景覆盖率换取安全提升。
ii. 宝马首席架构师Simon Fürst提到:“iNext主要依靠激光雷达估算道路曲率,激光雷达制作的地图也可以提供曲率,也有助于定位”。
iii. 广汽智能驾驶部长郭继舜提到:“采用Lidar增强功能安全级别,传感器的异构冗余,克服毫米波雷达对金属目标虚警的天然劣势”。
iv. Volvo XC90正在调研让Lidar作为标配来促进ADAS的功能演进。
六.总结
撼动传统行业的新型科技都有一个共同特点:产品推出以后,一项或多项生产工作的成本降到几乎为零。一旦事物的发展落入"零原则"的范畴,那这项技术必将大概率商业化。汽车公司偏爱这种思路——其主要原因,就是硬件优势很大,该方案可以延长他们对方向盘的掌控时间——即汽车行业的主导权。
但这一原则被特斯拉Autopilot给打破了,Autopilot给汽车带来了前所未有的软件属性和可生长的智能体验,同步也带来了接近一半的整车利润。
智能驾驶是人工智能触碰实体经济的一个影响最大的案例,人工智能和大数据的汇入,将汽车变成了一个具备增值空间的信息技术平台和新型服务入口,软件属性前景一片辉煌。
这个变革本质上将人类过往半个世纪的计算机、互联网、交互等技术进步都要浓缩到汽车这个新的载体上,打造一个崭新的技术创新生态。最重要的是让原本低频迭代的汽车产品,变成一个高频迭代的技术平台,蕴含了巨大的商机。变革深远,多维跨界、技术壁垒高、高端人才需求集中,需要十年磨一剑的勇气和决心。
变革成功的汽车公司未来将是一个科技公司、大数据公司、软件公司、出行服务公司,赢得未来的闪亮入场券。
所以我们看到了特斯拉硬件预埋的商业逻辑:从0到1打造一个未来信息平台和服务生态,形成技术护城河、快速创新的闭环和商业垄断。从特斯拉Autopilot到Robotaxi,RoboTruck,都是这一路线的产物,成为一个个活生生的汽车涅槃案例。
跟Elon共同经营Paypal的Peter Thiel在《从0到1》这本书里面提到:
垄断生意是一个健康的存在,只有在早期形成壁垒的创业公司才能潜下心纵向深耕,推进技术的真正进步。
特斯拉用十年完成了从0到1,现在大家纷纷入场,希望完成从1到N,推动智能电车的普及。在这个新的赛道上,技术创新是本质,各个车企选择什么突破口、什么打法、用多少投入和时间、如何形成自己的差异化、真正输出什么价值,是启程前最需要思考的核心问题。
ADAS本身是复杂系统工程,且从1到N的过程中面临大量竞争,已经占据先机者可能还会降维打击,这条路要走通并不容易。
正如同凯文·凯利所说:
技术,是人的"第二肌肤",一直是,将来也是。
每一个技术预言家都是梦想家,他们研究汽车,走进ADAS科学,是想知道技术的本质是什么,未来长成什么样。