STM32学习笔记一一RTC实时时钟
前言:
为了方便查看博客,特意申请了一个公众号,附上二维码,有兴趣的朋友可以关注,和我一起讨论学习,一起享受技术,一起成长。

1. 简述
STM32 的实时时钟(RTC)是一个独立的定时器。 STM32 的 RTC 模块拥有一组连续计数的计数器,在相应软件配置下,可提供时钟日历的功能。修改计数器的值可以重新设置系统当前的时间和日期。
RTC 模块和时钟配置系统 (RCC_BDCR 寄存器)是在后备区域,即在系统复位或从待机模式唤醒后 RTC 的设置和时间维持不变。但是在系统复位后,会自动禁止访问后备寄存器和 RTC,以防止对后备区域 (BKP) 的意外写操作。所以在要设置时间之前, 先要取消备份区域(BKP)写保护。

RTC 由两个主要部分组成(参见上图), 第一部分(APB1 接口)用来和 APB1 总线相连。此单元还包含一组 16 位寄存器,可通过 APB1 总线对其进行读写操作。 APB1 接口由 APB1 总线时钟驱动,用来与 APB1 总线连接。
另一部分 (RTC 核心) 由一组可编程计数器组成,分成两个主要模块。第一个模块是 RTC 的预分频模块,它可编程产生 1 秒的 RTC 时间基准 TR_CLK。 RTC 的预分频模块包含了一个 20 位的可编程分频器 (RTC 预分频器)。如果在 RTC_CR 寄存器中设置了相应的允许位,则在每个TR_CLK 周期中 RTC 产生一个中断(秒中断)。第二个模块是一个 32 位的可编程计数器,可被初始化为当前的系统时间,一个 32 位的时钟计数器,按秒钟计算,可以记录 4294967296 秒,约合 136 年左右。
RTC 还有一个闹钟寄存器 RTC_ALR,用于产生闹钟。系统时间按 TR_CLK 周期累加并与存储在 RTC_ALR 寄存器中的可编程时间相比较,如果 RTC_CR 控制寄存器中设置了相应允许位,比较匹配时将产生一个闹钟中断。RTC 内核完全独立于 RTC APB1 接口,而软件是通过 APB1 接口访问 RTC 的预分频值、计数器值和闹钟值的。但是相关可读寄存器只在 RTC APB1 时钟进行重新同步的 RTC 时钟的上升沿被更新, RTC 标志也是如此。这就意味着,如果 APB1 接口刚刚被开启之后,在第一次的内部寄存器更新之前,从 APB1 上读取的 RTC 寄存器值可能被破坏了(通常读到 0)。因此,若在读取 RTC 寄存器曾经被禁止的 RTC APB1 接口,软件首先必须等待 RTC_CRL 寄存器的 RSF位(寄存器同步标志位, bit3)被硬件置 1。
2. RTC 寄存器介绍
2.1 RTC 的控制寄存器——RTC_CRH 寄存器
 该寄存器用来控制中断的。
该寄存器用来控制中断的。
2.2 RTC 的控制寄存器——RTC_CRL 寄存器
 RTC 用到的是该寄存器的 0、 3~5 这几个位,第 0 位是秒钟标志位,我们在进入闹钟中断的时候,通过判断这位来决定是不是发生了秒钟中断。然后必须通过软件将该位清零(写 0)。第 3 位为寄存器同步标志位,我们在修改控制寄存器 RTC_CRH/CRL 之前,必须先判断该位,是否已经同步了,如果没有则等待同步,在没同步的情况下修 RTC_CRH/CRL 的值是不行的。第 4 位为配置标位,在软件修改 RTC_CNT/RTC_ALR/RTC_PRL 的值的时候,必须先软件置位该位,以允许进入配置模式。第 5 位为 RTC 操作位,该位由硬件操作,软件只读。通过该位可以判断上次对 RTC 寄存器的操作是否完成,如果没有,我们必须等待上一次操作结束才能开始下一次操作。
RTC 用到的是该寄存器的 0、 3~5 这几个位,第 0 位是秒钟标志位,我们在进入闹钟中断的时候,通过判断这位来决定是不是发生了秒钟中断。然后必须通过软件将该位清零(写 0)。第 3 位为寄存器同步标志位,我们在修改控制寄存器 RTC_CRH/CRL 之前,必须先判断该位,是否已经同步了,如果没有则等待同步,在没同步的情况下修 RTC_CRH/CRL 的值是不行的。第 4 位为配置标位,在软件修改 RTC_CNT/RTC_ALR/RTC_PRL 的值的时候,必须先软件置位该位,以允许进入配置模式。第 5 位为 RTC 操作位,该位由硬件操作,软件只读。通过该位可以判断上次对 RTC 寄存器的操作是否完成,如果没有,我们必须等待上一次操作结束才能开始下一次操作。
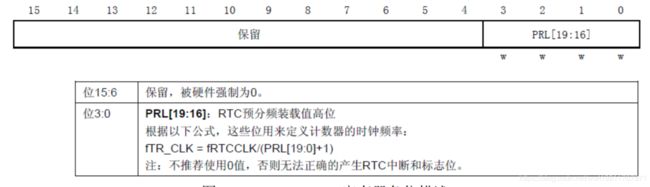
2.3 RTC 预分频装载寄存器——RTC_PRLH 寄存器
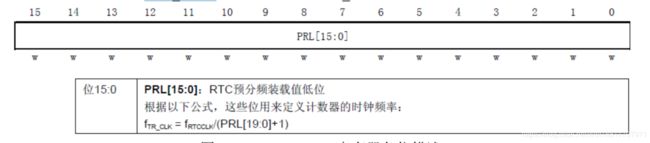
这两个寄存器用来配置 RTC 时钟的分频数的,比如我们使用外部 32.768K 的晶振作为时钟的输入频率,那么我们要设置这两个寄存器的值为 32767,以得到一秒钟的计数频率。
2.4 RTC 预分频装载寄存器——RTC_PRLL 寄存器
2.5 RTC 预分频器余数寄存器——RTC_DIVH 寄存器

2.6 RTC 预分频器余数寄存器——RTC_DIVH 寄存器

这两个寄存器的作用就是用来获得比秒钟更为准确的时钟,比如可以得到 0.1 秒,或者 0.01 秒等。该寄存器的值自减的,用于保存还需要多少时钟周期获得一个秒信号。在一次秒钟更新后,由硬件重新装载。
2.7 RTC 计数器寄存器——RTC_CNT 寄存器
该寄存器由 2 个 16 位的寄存器组成 RTC_CNTH 和 RTC_CNTL,总共 32 位,用来记录秒钟值(一般情况下)。在修改这个寄存器的时候要先进入配置模式。

2.8 RTC 计数器寄存器——RTC 闹钟寄存器
该寄存器也是由 2 个 16 位的寄存器组成 RTC_ALRH 和 RTC_ALRL。总共也是 32 位,用来标记闹钟产生的时间(以秒为单位),如果 RTC_CNT 的值与 RTC_ALR 的值相等,并使能了中断的话,会产生一个闹钟中断。该寄存器的修改也要进入配置模式才能进行。

3. 备份寄存器介绍
备份寄存器是 42 个 16 位的寄存器(Mini 开发板就是大容量的),可用来存储 84 个字节的用户应用程序数据。他们处在备份域里,当 VDD 电源被切断,他们仍然由 VBAT 维持供电。即使系统在待机模式下被唤醒,或系统复位或电源复位时,他们也不会被复位。
复位后,对备份寄存器和 RTC 的访问被禁止,并且备份域被保护以防止可能存在的意外的
写操作。执行以下操作可以使能对备份寄存器和 RTC 的访问:
(1)通过设置寄存器 RCC_APB1ENR 的 PWREN 和 BKPEN 位来打开电源和后备接口的时钟;
(2)电源控制寄存器 (PWR_CR) 的 DBP 位来使能对后备寄存器和 RTC 的访问。
一般用 BKP 来存储 RTC 的校验值或者记录一些重要的数据,相当于一个 EEPROM,不过这个 EEPROM 并不是真正的 EEPROM,而是需要电池来维持它的数据。
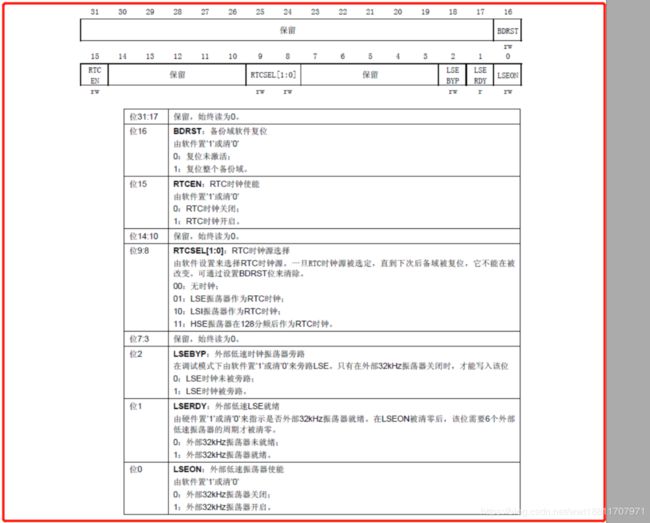
RTC 的时钟源选择及使能设置都是通过这个寄存器来实现的,所以我们在 RTC 操作之前先要通过这个寄存器选择 RTC 的时钟源,然后才能开始其他的操作。
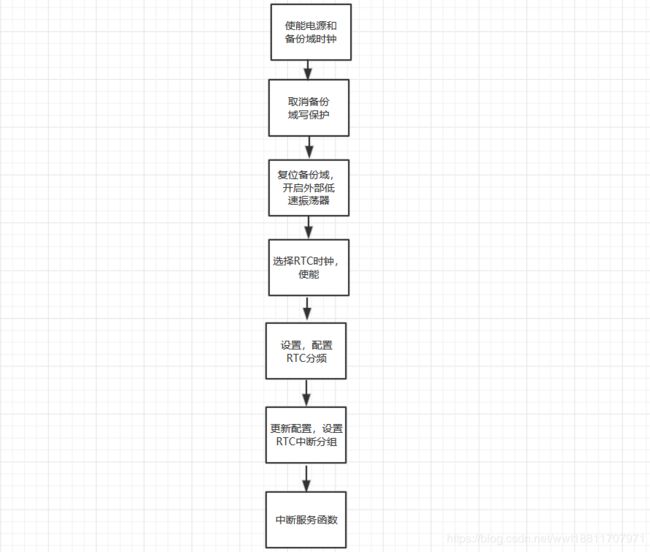
4. RTC 配置步骤
(1) 使能电源时钟和备份区域时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
(2) 取消备份区写保护
PWR_BackupAccessCmd(ENABLE); //使能 RTC 和后备寄存器访问
(3) 复位备份区域,开启外部低速振荡器。
BKP_DeInit();//复位备份区域
(4) 选择 RTC 时钟,并使能
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE); //选择 LSE 作为 RTC 时钟(RCC_RTCCLKSource_LSI 和 RCC_RTCCLKSource_HSE_Div128)
RCC_RTCCLKCmd(ENABLE); //使能 RTC 时钟
(5) 设置 RTC 的分频,以及配置 RTC 时钟
在开启了 RTC 时钟之后,我们要做的是设置 RTC 时钟的分频数,通过 RTC_PRLH 和RTC_PRLL 来设置,然后等待 RTC 寄存器操作完成,并同步之后,设置秒钟中断。然后设置 RTC 的允许配置位(RTC_CRH 的 CNF 位),设置时间(其实就是设置RTC_CNTH 和 RTC_CNTL两个寄存器)。
RTC_EnterConfigMode();/// 允许配置
RTC_ExitConfigMode();//退出配置模式,更新配置
void RTC_SetPrescaler(uint32_t PrescalerValue);
void RTC_ITConfig(uint16_t RTC_IT, FunctionalState NewState);//RTC_ITConfig(RTC_IT_SEC, ENABLE); //使能 RTC 秒中断
void RTC_SetCounter(uint32_t CounterValue)最后在配置完成之后
(6) 更新配置,设置 RTC 中断分组
设置完时钟之后,我们将配置更新同时退出配置模式,这里还是通过 RTC_CRH 的 CNF
来实现。
RTC_ExitConfigMode();//退出配置模式,更新配置
在退出配置模式更新配置之后我们在备份区域 BKP_DR1 中写入 0X5050 代表我们已经初始化过时钟了,下次开机(或复位)的时候,先读取 BKP_DR1 的值,然后判断是否是 0X5050 来决定是不是要配置。接着我们配置 RTC 的秒钟中断,并进行分组。
void BKP_WriteBackupRegister(uint16_t BKP_DR, uint16_t Data);//往备份区域写用户数据
uint16_t BKP_ReadBackupRegister(uint16_t BKP_DR);//读取备份区域指定寄存器
(7) 编写中断服务函数
流程图:
5. 程序实现
5.1 初始化
u8 RTC_Init(void)
{
//检查是不是第一次配置时钟
u8 temp=0;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE); //使能PWR和BKP外设时钟
PWR_BackupAccessCmd(ENABLE); //使能后备寄存器访问
if (BKP_ReadBackupRegister(BKP_DR1) != 0x5050) //从指定的后备寄存器中读出数据:读出了与写入的指定数据不相乎
{
BKP_DeInit(); //复位备份区域
RCC_LSEConfig(RCC_LSE_ON); //设置外部低速晶振(LSE),使用外设低速晶振
while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET) //检查指定的RCC标志位设置与否,等待低速晶振就绪
{
temp++;
delay_ms(10);
}
if(temp>=250)
return 1;//初始化时钟失败,晶振有问题
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE); //设置RTC时钟(RTCCLK),选择LSE作为RTC时钟
RCC_RTCCLKCmd(ENABLE); //使能RTC时钟
RTC_WaitForLastTask(); //等待最近一次对RTC寄存器的写操作完成
RTC_WaitForSynchro(); //等待RTC寄存器同步
RTC_ITConfig(RTC_IT_SEC, ENABLE); //使能RTC秒中断
RTC_WaitForLastTask(); //等待最近一次对RTC寄存器的写操作完成
RTC_EnterConfigMode();/// 允许配置
RTC_SetPrescaler(32767); //设置RTC预分频的值
RTC_WaitForLastTask(); //等待最近一次对RTC寄存器的写操作完成
RTC_Set(1972,1,2,1,1,1); //设置时间
RTC_ExitConfigMode(); //退出配置模式
BKP_WriteBackupRegister(BKP_DR1, 0X5050); //向指定的后备寄存器中写入用户程序数据
}
else//系统继续计时
{
RTC_WaitForSynchro(); //等待最近一次对RTC寄存器的写操作完成
RTC_ITConfig(RTC_IT_SEC, ENABLE); //使能RTC秒中断
RTC_WaitForLastTask(); //等待最近一次对RTC寄存器的写操作完成
}
RTC_NVIC_Config();//RCT中断分组设置
RTC_Get();//更新时间
return 0; //ok
}
static void RTC_NVICConfig(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = RTC_IRQn; //RTC全局中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级1位,从优先级3位
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //先占优先级0位,从优先级4位
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能该通道中断
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
}
中断服务函数:
void RTC_IRQHandler(void)
{
if (RTC_GetITStatus(RTC_IT_SEC) != RESET)//秒钟中断
{
RTC_Get();//更新时间
}
if(RTC_GetITStatus(RTC_IT_ALR)!= RESET)//闹钟中断
{
RTC_ClearITPendingBit(RTC_IT_ALR); //清闹钟中断
}
RTC_ClearITPendingBit(RTC_IT_SEC|RTC_IT_OW); //清闹钟中断
RTC_WaitForLastTask();
}
5.2 RTC部分实现
闰年判断:
//判断是否是闰年函数
//月份 1 2 3 4 5 6 7 8 9 10 11 12
//闰年 31 29 31 30 31 30 31 31 30 31 30 31
//非闰年 31 28 31 30 31 30 31 31 30 31 30 31
//输入:年份
//输出:该年份是不是闰年.1,是.0,不是
u8 Is_Leap_Year(u16 year)
{
if(year%4==0) //必须能被4整除
{
if(year%100==0)
{
if(year%400==0)
return 1;//如果以00结尾,还要能被400整除
else
return 0;
}
else
return 1;
}
else
return 0;
}
时钟设置:
//设置时钟
//把输入的时钟转换为秒钟
//以1970年1月1日为基准
//1970~2099年为合法年份
//返回值:0,成功;其他:错误代码.
//月份数据表
u8 const table_week[12]={0,3,3,6,1,4,6,2,5,0,3,5}; //月修正数据表
//平年的月份日期表
const u8 mon_table[12]={31,28,31,30,31,30,31,31,30,31,30,31};
u8 RTC_Set(u16 syear,u8 smon,u8 sday,u8 hour,u8 min,u8 sec)
{
u16 t;
u32 seccount=0;
if(syear<1970||syear>2099)
return 1;
for(t=1970;t<syear;t++) //把所有年份的秒钟相加
{
if(Is_Leap_Year(t))
seccount += 31622400;//闰年的秒钟数
else
seccount += 31536000; //平年的秒钟数
}
smon -= 1;//月份从1开始,数组从0开始计数
for(t=0;t<smon;t++) //把前面月份的秒钟数相加(整月份)
{
seccount += (u32)mon_table[t] * 86400;//月份秒钟数相加
if(Is_Leap_Year(syear)&&t==1)
seccount += 86400;//闰年2月份增加一天的秒钟数
}
seccount += (u32)(sday-1) * 86400;//把前面日期的秒钟数相加(整天数)
seccount += (u32)hour * 3600;//小时秒钟数
seccount += (u32)min * 60; //分钟秒钟数
seccount += sec;//最后的秒钟加上去
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE); //使能PWR和BKP外设时钟
PWR_BackupAccessCmd(ENABLE); //使能RTC和后备寄存器访问
RTC_SetCounter(seccount); //设置RTC计数器的值
RTC_WaitForLastTask(); //等待最近一次对RTC寄存器的写操作完成
RTC_Get();
return 0;
}
得到当前时间:
//得到当前的时间
//返回值:0,成功;其他:错误代码.
u8 RTC_Get(void)
{
static u16 daycnt=0;
u32 timecount=0;
u32 temp=0;
u16 temp1=0;
timecount = RTC_GetCounter();
//timecount = 86400*4+88;
temp = timecount / 86400; //得到天数(秒钟数对应的)
if(daycnt!=temp)//超过一天了
{
daycnt = temp;
temp1 = 1970; //从1970年开始
while(temp>=365)
{
if(Is_Leap_Year(temp1))//是闰年
{
if(temp>=366)
temp -= 366;//减去一闰年,还剩下的天数
else
{
temp1 ++;
break;
}
}
else
temp -= 365; //减去一平年 ,还剩下的天数
temp1 ++;
}
calendar.w_year = temp1;//得到年份
temp1=0;
while(temp>=28)//28天,超过了最小的一个月
{
if(Is_Leap_Year(calendar.w_year)&&temp1==1)//当年是不是闰年/2月份
{
if(temp>=29)
temp -= 29;//闰年的秒钟数
else
break;
}
else
{
if(temp>=mon_table[temp1])
temp -= mon_table[temp1];//平年
else
break;
}
temp1++;
}
calendar.w_month = temp1+1; //得到月份
calendar.w_date = temp+1; //得到日期
}
temp = timecount%86400; //得到秒钟数
calendar.hour = temp/3600; //小时
calendar.min = (temp%3600)/60; //分钟
calendar.sec = (temp%3600)%60; //秒钟
calendar.week = RTC_Get_Week(calendar.w_year,calendar.w_month,calendar.w_date);//获取星期
return 0;
}
得到星期几:
//获得现在是星期几
//功能描述:输入公历日期得到星期(只允许1901-2099年)
//输入参数:公历年月日
//返回值:星期号
u8 RTC_GetWeek(u16 year,u8 month,u8 day)
{
u16 temp2;
u8 yearH,yearL;
yearH = year/100;
yearL = year%100;
// 如果为21世纪,年份数加100
if (yearH>19)
yearL += 100;
// 所过闰年数只算1900年之后的
temp2 = yearL+yearL/4;
temp2 = temp2%7;
temp2 = temp2+day+table_week[month-1];
if (yearL%4==0&&month<3)
temp2--;
return(temp2%7);
}
对于星期如何转换,可参考如下链接:
1.RTC-由年月日计算星期几
2.基姆拉尔森计算公式
6. 附录:
STM32 时钟树:

参考:
1.[原子教程库函数实现]
2.STM32开发 – RTC详解