入门神经网络优化算法(五):一文看懂二阶优化算法Natural Gradient Descent(Fisher Information)
欢迎查看我的博客文章合集:我的Blog文章索引::机器学习方法系列,深度学习方法系列,三十分钟理解系列等
这个系列会有多篇神经网络优化方法的复习/学习笔记,主要是一些优化器。目前有计划的包括:
- 入门神经网络优化算法(一):Gradient Descent,Momentum,Nesterov accelerated gradient
- 入门神经网络优化算法(二):Adaptive Optimization Methods:Adagrad,RMSprop,Adam
- 入门神经网络优化算法(三):待定
- 入门神经网络优化算法(四):AMSGrad,Radam等一些Adam变种
- 入门神经网络优化算法(五):二阶优化算法Natural Gradient Descent(Fisher Information)
- 入门神经网络优化算法(六):二阶优化算法K-FAC
- 入门神经网络优化算法(七):二阶优化算法Shampoo
文章目录
- 1. Fisher Information Matrix
- 1.1 Score function
- 1.2 Fisher Information
- 1.3 Fisher矩阵和Hessian矩阵的关系
- 2. 自然梯度下降法Natural Gradient Descent
- 2.1 分布空间中的最速下降,Natural gradient方法
- 与Adam关系的类比讨论
- 参考资料
二阶优化算法Natural Gradient Descent,是从分布空间推导最速梯度下降方向的方法,和牛顿方法有非常紧密的联系。Fisher Information Matrix往往可以用来代替牛顿法的Hessian矩阵计算。下面详细道来。
1. Fisher Information Matrix
了解Natural Gradient Descent方法,需要先了解Fisher Information Matrix的定义。参考资料主要有[1][2],加上我自己的理解。
1.1 Score function
假设我们有一个模型参数向量是 θ \theta θ,似然函数一般表示成 p ( x ∣ θ ) p(x | \theta) p(x∣θ)。在很多算法中,我们经常需要学习参数 θ \theta θ以最大化似然函数(likelihood) p ( x ∣ θ ) p(x | \theta) p(x∣θ)。这个时候,定义Score function s ( θ ) s(\theta) s(θ),the gradient of log likelihood function:
s ( θ ) = ∇ θ log p ( x ∣ θ ) s(\theta) = \nabla_{\theta} \log p(x \vert \theta) \\ s(θ)=∇θlogp(x∣θ)
这个Score function在很多地方都要用到,特别的,在强化学习Policy Gradient类方法中,我们会直接用到Score function求参数梯度来更新policy参数。
Score function的性质:The expected value of score function wrt. the model is zero.
证明:
E p ( x ∣ θ ) [ s ( θ ) ] = E p ( x ∣ θ ) [ ∇ log p ( x ∣ θ ) ] = ∫ ∇ log p ( x ∣ θ ) p ( x ∣ θ ) d x = ∫ 1 p ( x ∣ θ ) ∇ p ( x ∣ θ ) p ( x ∣ θ ) d x = ∫ ∇ p ( x ∣ θ ) d x = ∇ ∫ p ( x ∣ θ ) d x = ∇ 1 = 0 \mathop{\mathbb{E}}_{p(x \vert \theta)} \left[ s(\theta) \right] = \mathop{\mathbb{E}}_{p(x \vert \theta)} \left[ \nabla \log p(x \vert \theta) \right] \\[5pt] = \int \nabla \log p(x \vert \theta) \, p(x \vert \theta) \, \text{d}x \\[5pt] = \int \frac{1}{p(x \vert \theta)} \nabla p(x \vert \theta) p(x \vert \theta) \text{d}x \\[5pt] = \int \nabla p(x \vert \theta) \, \text{d}x \\[5pt] = \nabla \int p(x \vert \theta) \, \text{d}x \\[5pt] = \nabla 1 \\[5pt] = 0 Ep(x∣θ)[s(θ)]=Ep(x∣θ)[∇logp(x∣θ)]=∫∇logp(x∣θ)p(x∣θ)dx=∫p(x∣θ)1∇p(x∣θ)p(x∣θ)dx=∫∇p(x∣θ)dx=∇∫p(x∣θ)dx=∇1=0
1.2 Fisher Information
虽然期望为零,但是我们需要评估Score function的不确定性,我们采用协方差矩阵的期望(针对模型本身):
E p ( x ∣ θ ) [ ( s ( θ ) − 0 ) ( s ( θ ) − 0 ) T ] \mathop{\mathbb{E}}_{p(x \vert \theta)} \left[ (s(\theta) - 0) \, (s(\theta) - 0)^{\text{T}} \right] Ep(x∣θ)[(s(θ)−0)(s(θ)−0)T]
上述定义(协方差矩阵的期望,针对model p ( x ∣ θ ) p(x \vert \theta) p(x∣θ) )称之为Fisher Information,如果 θ \theta θ是表示成一个列向量,那么Score function也是一个列向量,而Fisher Information是一个矩阵形式,我们称之为Fisher Information Matrix。
F = E p ( x ∣ θ ) [ ∇ log p ( x ∣ θ ) ∇ log p ( x ∣ θ ) T ] \text{F} = \mathop{\mathbb{E}}_{p(x \vert \theta)} \left[ \nabla \log p(x \vert \theta) \, \nabla \log p(x \vert \theta)^{\text{T}} \right] F=Ep(x∣θ)[∇logp(x∣θ)∇logp(x∣θ)T]
但是呢,往往 p ( x ∣ θ ) p(x \vert \theta) p(x∣θ) 形式是比较复杂的,甚至是一个模型的输出,要计算期望是不太可能的。因此,实际上我们用的比较多的情况是,采用training data X = { x 1 , x 2 , ⋯ , x N } X = \{ x_1, x_2, \cdots, x_N \} X={x1,x2,⋯,xN}计算得到的Empirical Fisher:
F = 1 N ∑ i = 1 N ∇ log p ( x i ∣ θ ) ∇ log p ( x i ∣ θ ) T \text{F} = \frac{1}{N} \sum_{i=1}^{N} \nabla \log p(x_i \vert \theta) \, \nabla \log p(x_i \vert \theta)^{\text{T}} F=N1i=1∑N∇logp(xi∣θ)∇logp(xi∣θ)T
1.3 Fisher矩阵和Hessian矩阵的关系
前面是背景介绍,下面进入正题,Fisher矩阵和Hessian矩阵的关系。可以证明:log似然函数的海森矩阵的期望的负数,等于Fisher Information Matrix.
Claim: The negative expected Hessian of log likelihood is equal to the Fisher Information Matrix F
证明:核心思想是,The Hessian of the log likelihood is given by the Jacobian of its gradient:
H log p ( x ∣ θ ) = J [ ∇ p ( x ∣ θ ) p ( x ∣ θ ) ] = H p ( x ∣ θ ) p ( x ∣ θ ) − ∇ p ( x ∣ θ ) ∇ p ( x ∣ θ ) T p ( x ∣ θ ) p ( x ∣ θ ) = H p ( x ∣ θ ) p ( x ∣ θ ) p ( x ∣ θ ) p ( x ∣ θ ) − ∇ p ( x ∣ θ ) ∇ p ( x ∣ θ ) T p ( x ∣ θ ) p ( x ∣ θ ) = H p ( x ∣ θ ) p ( x ∣ θ ) − ( ∇ p ( x ∣ θ ) p ( x ∣ θ ) ) ( ∇ p ( x ∣ θ ) p ( x ∣ θ ) ) T \text{H}_{\log p(x \vert \theta)} = \text{J} \left[\frac{\nabla p(x \vert \theta)}{p(x \vert \theta)}\right] \\[8pt] = \frac{ \text{H}_{p(x \vert \theta)} \, p(x \vert \theta) - \nabla p(x \vert \theta) \, \nabla p(x \vert \theta)^{\text{T}}}{p(x \vert \theta) \, p(x \vert \theta)} \\[8pt] = \frac{\text{H}_{p(x \vert \theta)} \, p(x \vert \theta)}{p(x \vert \theta) \, p(x \vert \theta)} - \frac{\nabla p(x \vert \theta) \, \nabla p(x \vert \theta)^{\text{T}}}{p(x \vert \theta) \, p(x \vert \theta)} \\[8pt] = \frac{\text{H}_{p(x \vert \theta)}}{p(x \vert \theta)} - \left( \frac{\nabla p(x \vert \theta)}{p(x \vert \theta)} \right) \left( \frac{\nabla p(x \vert \theta)}{p(x \vert \theta)}\right)^{\text{T}} Hlogp(x∣θ)=J[p(x∣θ)∇p(x∣θ)]=p(x∣θ)p(x∣θ)Hp(x∣θ)p(x∣θ)−∇p(x∣θ)∇p(x∣θ)T=p(x∣θ)p(x∣θ)Hp(x∣θ)p(x∣θ)−p(x∣θ)p(x∣θ)∇p(x∣θ)∇p(x∣θ)T=p(x∣θ)Hp(x∣θ)−(p(x∣θ)∇p(x∣θ))(p(x∣θ)∇p(x∣θ))T
推导的时候主要注意, p ( x ∣ θ ) p(x \vert \theta) p(x∣θ)是一个标量;而 ∇ p ( x ∣ θ ) \nabla p(x \vert \theta) ∇p(x∣θ)是对参数的梯度,是一个列向量。
然后Taking expectation wrt. the model, we have:
E p ( x ∣ θ ) [ H log p ( x ∣ θ ) ] = E p ( x ∣ θ ) [ H p ( x ∣ θ ) p ( x ∣ θ ) − ( ∇ p ( x ∣ θ ) p ( x ∣ θ ) ) ( ∇ p ( x ∣ θ ) p ( x ∣ θ ) ) T ] = E p ( x ∣ θ ) [ H p ( x ∣ θ ) p ( x ∣ θ ) ] − E p ( x ∣ θ ) [ ( ∇ p ( x ∣ θ ) p ( x ∣ θ ) ) ( ∇ p ( x ∣ θ ) p ( x ∣ θ ) ) T ] = ∫ H p ( x ∣ θ ) p ( x ∣ θ ) p ( x ∣ θ ) d x − E p ( x ∣ θ ) [ ∇ log p ( x ∣ θ ) ∇ log p ( x ∣ θ ) T ] = H ∫ p ( x ∣ θ ) d x − F = H 1 − F = − F . \mathop{\mathbb{E}}_{p(x \vert \theta)} \left[ \text{H}_{\log p(x \vert \theta)} \right] = \mathop{\mathbb{E}}_{p(x \vert \theta)} \left[ \frac{\text{H}_{p(x \vert \theta)}}{p(x \vert \theta)} - \left( \frac{\nabla p(x \vert \theta)}{p(x \vert \theta)} \right) \left( \frac{\nabla p(x \vert \theta)}{p(x \vert \theta)} \right)^{\text{T}} \right] \\[5pt] = \mathop{\mathbb{E}}_{p(x \vert \theta)} \left[ \frac{\text{H}_{p(x \vert \theta)}}{p(x \vert \theta)} \right] - \mathop{\mathbb{E}}_{p(x \vert \theta)} \left[ \left( \frac{\nabla p(x \vert \theta)}{p(x \vert \theta)} \right) \left( \frac{\nabla p(x \vert \theta)}{p(x \vert \theta)}\right)^{\text{T}} \right] \\[5pt] = \int \frac{\text{H}_{p(x \vert \theta)}}{p(x \vert \theta)} p(x \vert \theta) \, \text{d}x \, - \mathop{\mathbb{E}}_{p(x \vert \theta)} \left[ \nabla \log p(x \vert \theta) \, \nabla \log p(x \vert \theta)^{\text{T}} \right] \\[5pt] = \text{H}_{\int p(x \vert \theta) \, \text{d}x} \, - \text{F} \\[5pt] = \text{H}_{1} - \text{F} \\[5pt] = -\text{F} \, . Ep(x∣θ)[Hlogp(x∣θ)]=Ep(x∣θ)[p(x∣θ)Hp(x∣θ)−(p(x∣θ)∇p(x∣θ))(p(x∣θ)∇p(x∣θ))T]=Ep(x∣θ)[p(x∣θ)Hp(x∣θ)]−Ep(x∣θ)[(p(x∣θ)∇p(x∣θ))(p(x∣θ)∇p(x∣θ))T]=∫p(x∣θ)Hp(x∣θ)p(x∣θ)dx−Ep(x∣θ)[∇logp(x∣θ)∇logp(x∣θ)T]=H∫p(x∣θ)dx−F=H1−F=−F.
因此我们得到了: F = − E p ( x ∣ θ ) [ H log p ( x ∣ θ ) ] \text{F} = -\mathop{\mathbb{E}}_{p(x \vert \theta)} \left[ \text{H}_{\log p(x \vert \theta)} \right] F=−Ep(x∣θ)[Hlogp(x∣θ)],证明完毕。我们可以将F的作用看作是对数似然函数曲率的度量。一种很自然的想法就是,在二阶优化算法中,比如牛顿法中,需要计算Hessian矩阵,那么是否可以用Fisher矩阵来代替Hessian举证呢?这就引出了下面要讲的natural gradient方法了。
2. 自然梯度下降法Natural Gradient Descent
先来讲一讲parameter space和distribution space的概念,导致了对梯度下降的不同理解。
-
parameter space:一般我们解决优化问题最常用的方法是用梯度下降,每一步优化方向采用负梯度方向, − ∇ θ L ( θ ) -\nabla_\theta \mathcal{L}(\theta) −∇θL(θ)。可以知道,负梯度方向是在当前的参数值 θ \theta θ的local neighborhood里loss在参数空间的最速下降方向。
− ∇ θ L ( θ ) ∥ ∇ θ L ( θ ) ∥ = lim ϵ → 0 1 ϵ arg min d s.t. ∥ d ∥ ≤ ϵ L ( θ + d ) . \frac{-\nabla_\theta \mathcal{L}(\theta)}{\lVert \nabla_\theta \mathcal{L}(\theta) \rVert} = \lim_{\epsilon \to 0} \frac{1}{\epsilon} \mathop{\text{arg min}}_{d \text{ s.t. } \lVert d \rVert \leq \epsilon} \mathcal{L}(\theta + d) \, . ∥∇θL(θ)∥−∇θL(θ)=ϵ→0limϵ1arg mind s.t. ∥d∥≤ϵL(θ+d).
上面的表达式是,参数空间中最陡的下降方向是选取一个向量 d d d,使得新参数 θ + d \theta+d θ+d在当前参数 θ \theta θ的 ϵ \epsilon ϵ-邻域内,并且我们选取使损失最小的 d d d。注意我们用欧几里德范数来表示这个邻域。因此,梯度下降的优化依赖于参数空间的欧氏几何度量。 -
distribution space:同时,如果我们的目标是最小化损失函数(最大化似然),那么我们自然会在所有可能的似然空间中采取优化步骤,通过参数 θ \theta θ来实现。由于似然函数本身是一个概率分布,我们称它所在的空间为分布空间(distribution space)。因此,在分布空间中采用最陡下降方向,而不是参数空间,是有道理的。
在distribution space中,用什么距离度量呢?常用的选择就是用KL散度(KL-divergence),KL散度常用语评估两个分布的接近程度。但是,实际上KL散度是不对称的,因此理论上不是一个distance metric,但是呢,很多地方还是用KL散度来衡量两个分布的接近程度。(as d d d goes to zero, KL-divergence is asymptotically symmetric. So, within a local neighbourhood, KL-divergence is approximately symmetric [3].)
2.1 分布空间中的最速下降,Natural gradient方法
前面讲了那么多,终于要引出自然梯度方法的基本推导了。
先推导KL散度的泰勒展开有如下形式:
KL [ p ( x ∣ θ ) ∥ p ( x ∣ θ + d ) ] ≈ 1 2 d T F d \text{KL}[p(x \vert \theta) \, \Vert \, p(x \vert \theta + d)] \approx \frac{1}{2} d^\text{T} \text{F} d KL[p(x∣θ)∥p(x∣θ+d)]≈21dTFd
证明:写出二阶泰勒展开:
KL [ p ( x ∣ θ ) ∥ p ( x ∣ θ + d ) ] ≈ KL [ p ( x ∣ θ ) ∥ p ( x ∣ θ ′ ) ] ∣ θ ′ = θ + ( ∇ θ ′ KL [ p ( x ∣ θ ) ∥ p ( x ∣ θ ′ ) ] ∣ θ ′ = θ ) T d + 1 2 d T ∇ θ ′ 2 KL [ p ( x ∣ θ ) ∥ p ( x ∣ θ ′ ) ] ∣ θ ′ = θ d = KL [ p ( x ∣ θ ) ∥ p ( x ∣ θ ) ] − E p ( x ∣ θ ) [ ∇ θ log p ( x ∣ θ ) ] T d + 1 2 d T F d = 1 2 d T F d \text{KL}[p(x \vert \theta) \, \Vert \, p(x \vert \theta+d)] \\[5pt] \approx \text{KL}[p(x \vert \theta) \, \Vert \, p(x \vert \theta')]\vert_{\theta' = \theta} + (\left. \nabla_{\theta'} \text{KL}[p(x \vert \theta) \, \Vert \, p(x \vert \theta')] \right\vert_{\theta' = \theta})^\text{T} d + \frac{1}{2} d^\text{T} \nabla_{\theta'}^2 \, \text{KL}[p(x \vert \theta) \, \Vert \, p(x \vert \theta')]\vert_{\theta' = \theta}d \\[5pt] =\text{KL}[p(x \vert \theta) \, \Vert \, p(x \vert \theta)] - \mathop{\mathbb{E}}_{p(x \vert \theta)} [ \nabla_\theta \log p(x \vert \theta) ]^\text{T} d + \frac{1}{2} d^\text{T} \text{F} d = \frac{1}{2} d^\text{T} \text{F} d\\[5pt] KL[p(x∣θ)∥p(x∣θ+d)]≈KL[p(x∣θ)∥p(x∣θ′)]∣θ′=θ+(∇θ′KL[p(x∣θ)∥p(x∣θ′)]∣θ′=θ)Td+21dT∇θ′2KL[p(x∣θ)∥p(x∣θ′)]∣θ′=θd=KL[p(x∣θ)∥p(x∣θ)]−Ep(x∣θ)[∇θlogp(x∣θ)]Td+21dTFd=21dTFd
这样理解为什么引入 θ ′ \theta' θ′:把KL散度第一个 p ( x ∣ θ ) p(x \vert \theta) p(x∣θ)看成一个确定的分布,而变化的是在第二个分布的参数上。我们依次来看下约等号 ≈ \approx ≈后面这三项:
-
泰勒展开的第一项 KL [ p θ ∥ p θ ] = 0 \text{KL}[p_{\theta} \, \Vert \, p_{\theta}] = 0 KL[pθ∥pθ]=0
-
第二项的推导:
∇ θ ′ KL [ p ( x ∣ θ ) ∥ p ( x ∣ θ ′ ) ] = ∇ θ ′ E p ( x ∣ θ ) [ log p ( x ∣ θ ) ] − ∇ θ ′ E p ( x ∣ θ ) [ log p ( x ∣ θ ′ ) ] = − E p ( x ∣ θ ) [ ∇ θ ′ log p ( x ∣ θ ′ ) ] = 0 \nabla_{\theta'} \text{KL}[p(x \vert \theta) \, \Vert \, p(x \vert \theta')] = \nabla_{\theta'} \mathop{\mathbb{E}}_{p(x \vert \theta)} [ \log p(x \vert \theta) ] - \nabla_{\theta'} \mathop{\mathbb{E}}_{p(x \vert \theta)} [ \log p(x \vert \theta') ] \\[8pt] = - \mathop{\mathbb{E}}_{p(x \vert \theta)} [ \nabla_{\theta'} \log p(x \vert \theta') ] =0\\[5pt] ∇θ′KL[p(x∣θ)∥p(x∣θ′)]=∇θ′Ep(x∣θ)[logp(x∣θ)]−∇θ′Ep(x∣θ)[logp(x∣θ′)]=−Ep(x∣θ)[∇θ′logp(x∣θ′)]=0
考虑 ∣ θ ′ = θ \vert_{\theta' = \theta} ∣θ′=θ的话,第二项包含了Score function的期望。正好是本章节前面Fisher Matrix部分讲过的,Score function的期望,已经证明过是0。 -
第三项,需要用到前面第一章证明过的, F = − E p ( x ∣ θ ) [ H log p ( x ∣ θ ) ] \text{F} = -\mathop{\mathbb{E}}_{p(x \vert \theta)} \left[ \text{H}_{\log p(x \vert \theta)} \right] F=−Ep(x∣θ)[Hlogp(x∣θ)],以及如下性质:Fisher Information Matrix F is the Hessian of KL-divergence between two distributions p ( x ∣ θ ) p(x \vert \theta) p(x∣θ) and p ( x ∣ θ ′ ) p(x \vert \theta') p(x∣θ′), with respect to θ ′ \theta' θ′, evaluated at θ ′ = θ \theta' = \theta θ′=θ,下面是推导过程:
KL [ p ( x ∣ θ ) ∥ p ( x ∣ θ ′ ) ] = E p ( x ∣ θ ) [ log p ( x ∣ θ ) ] − E p ( x ∣ θ ) [ log p ( x ∣ θ ′ ) ] \text{KL} [p(x \vert \theta) \, \Vert \, p(x \vert \theta')] = \mathop{\mathbb{E}}_{p(x \vert \theta)} [ \log p(x \vert \theta) ] - \mathop{\mathbb{E}}_{p(x \vert \theta)} [ \log p(x \vert \theta') ] KL[p(x∣θ)∥p(x∣θ′)]=Ep(x∣θ)[logp(x∣θ)]−Ep(x∣θ)[logp(x∣θ′)]
The first derivative wrt. θ ′ \theta' θ′ is:
∇ θ ′ KL [ p ( x ∣ θ ) ∥ p ( x ∣ θ ′ ) ] = ∇ θ ′ E p ( x ∣ θ ) [ log p ( x ∣ θ ) ] − ∇ θ ′ E p ( x ∣ θ ) [ log p ( x ∣ θ ′ ) ] = − E p ( x ∣ θ ) [ ∇ θ ′ log p ( x ∣ θ ′ ) ] = − ∫ p ( x ∣ θ ) ∇ θ ′ log p ( x ∣ θ ′ ) d x \nabla_{\theta'} \text{KL}[p(x \vert \theta) \, \Vert \, p(x \vert \theta')] = \nabla_{\theta'} \mathop{\mathbb{E}}_{p(x \vert \theta)} [ \log p(x \vert \theta) ] - \nabla_{\theta'} \mathop{\mathbb{E}}_{p(x \vert \theta)} [ \log p(x \vert \theta') ] \\[5pt] = - \mathop{\mathbb{E}}_{p(x \vert \theta)} [ \nabla_{\theta'} \log p(x \vert \theta') ] \\[5pt] = - \int p(x \vert \theta) \nabla_{\theta'} \log p(x \vert \theta') \, \text{d}x ∇θ′KL[p(x∣θ)∥p(x∣θ′)]=∇θ′Ep(x∣θ)[logp(x∣θ)]−∇θ′Ep(x∣θ)[logp(x∣θ′)]=−Ep(x∣θ)[∇θ′logp(x∣θ′)]=−∫p(x∣θ)∇θ′logp(x∣θ′)dx
The second derivative is:
∇ θ ′ 2 KL [ p ( x ∣ θ ) ∥ p ( x ∣ θ ′ ) ] ∣ θ ′ = θ = − ∫ p ( x ∣ θ ) ∇ θ ′ 2 log p ( x ∣ θ ′ ) ∣ θ ′ = θ d x = − ∫ p ( x ∣ θ ) H log p ( x ∣ θ ) d x = − E p ( x ∣ θ ) [ H log p ( x ∣ θ ) ] = F \nabla_{\theta'}^2 \, \text{KL}[p(x \vert \theta) \, \Vert \, p(x \vert \theta')]\vert_{\theta' = \theta} = - \int p(x \vert \theta) \, \nabla_{\theta'}^2 \log p(x \vert \theta')\vert_{\theta' = \theta} \, \text{d}x \\[5pt] = - \int p(x \vert \theta) \, \text{H}_{\log p(x \vert \theta)} \, \text{d}x \\[5pt] = - \mathop{\mathbb{E}}_{p(x \vert \theta)} [\text{H}_{\log p(x \vert \theta)}] \\[5pt] = \text{F} ∇θ′2KL[p(x∣θ)∥p(x∣θ′)]∣θ′=θ=−∫p(x∣θ)∇θ′2logp(x∣θ′)∣θ′=θdx=−∫p(x∣θ)Hlogp(x∣θ)dx=−Ep(x∣θ)[Hlogp(x∣θ)]=F
所以得到KL散度的二阶泰勒展开形式:
KL [ p ( x ∣ θ ) ∥ p ( x ∣ θ + d ) ] ≈ 1 2 d T F d \text{KL}[p(x \vert \theta) \, \Vert \, p(x \vert \theta + d)] \approx \frac{1}{2} d^\text{T} \text{F} d KL[p(x∣θ)∥p(x∣θ+d)]≈21dTFd
现在,我们想知道什么是使分布空间中的损失函数L最小化的更新向量d,以便我们知道哪个方向的KL散度减小得最多。这类似于最速下降法,但在以KL散度为度量的分布空间,而不是通常的以欧氏度量的参数空间。为此,我们将最小化:
d ∗ = arg min d s.t. KL [ p θ ∥ p θ + d ] ≤ c L ( θ + d ) , d^* = \mathop{\text{arg min}}_{d \text{ s.t. } \text{KL}[p_\theta \Vert p_{\theta + d}] \leq c} \mathcal{L} (\theta + d) \, , d∗=arg mind s.t. KL[pθ∥pθ+d]≤cL(θ+d),
如果我们写出上面的最小化问题在拉格朗日乘子法形式,用二阶泰勒展开近似KL散度,用一阶泰勒级数展开近似 L \mathcal{L} L:
d ∗ = arg min d L ( θ + d ) + λ ( KL [ p θ ∥ p θ + d ] − c ) ≈ arg min d L ( θ ) + ∇ θ L ( θ ) T d + 1 2 λ d T F d − λ c d^* = \mathop{\text{arg min}}_d \, \mathcal{L} (\theta + d) + \lambda \, (\text{KL}[p_\theta \Vert p_{\theta + d}] - c) \\[8pt] \approx \mathop{\text{arg min}}_d \, \mathcal{L}(\theta) + \nabla_\theta \mathcal{L}(\theta)^\text{T} d + \frac{1}{2} \lambda \, d^\text{T} \text{F} d - \lambda c d∗=arg mindL(θ+d)+λ(KL[pθ∥pθ+d]−c)≈arg mindL(θ)+∇θL(θ)Td+21λdTFd−λc
其中 λ \lambda λ是拉格朗日系数,要求解这个优化问题,我们求 d d d的梯度等于0:
0 = ∂ ∂ d [ L ( θ ) + ∇ θ L ( θ ) T d + 1 2 λ d T F d − λ c ] = ∇ θ L ( θ ) + λ F d λ F d = − ∇ θ L ( θ ) d = − 1 λ F − 1 ∇ θ L ( θ ) 0 = \frac{\partial}{\partial d} \left[\mathcal{L}(\theta) + \nabla_\theta \mathcal{L}(\theta)^\text{T} d + \frac{1}{2} \lambda \, d^\text{T} \text{F} d - \lambda c\right] \\[8pt] = \nabla_\theta \mathcal{L}(\theta) + \lambda \, \text{F} d \\[8pt] \lambda \, \text{F} d = -\nabla_\theta \mathcal{L}(\theta) \\[8pt] d = -\frac{1}{\lambda} \text{F}^{-1} \nabla_\theta \mathcal{L}(\theta) \\[8pt] 0=∂d∂[L(θ)+∇θL(θ)Td+21λdTFd−λc]=∇θL(θ)+λFdλFd=−∇θL(θ)d=−λ1F−1∇θL(θ)
因此,先不看 1 λ \frac{1}{\lambda} λ1(可以一起考虑吸收到learning rate部分),我们得到在分布空间中,最优的更新方向是 − F − 1 ∇ θ L ( θ ) -\text{F}^{-1} \nabla_\theta \mathcal{L}(\theta) −F−1∇θL(θ)。(类比二阶优化方法的牛顿法,更新方向是 − H − 1 ∇ θ L ( θ ) -\text{H}^{-1} \nabla_\theta \mathcal{L}(\theta) −H−1∇θL(θ),非常类似吧)。
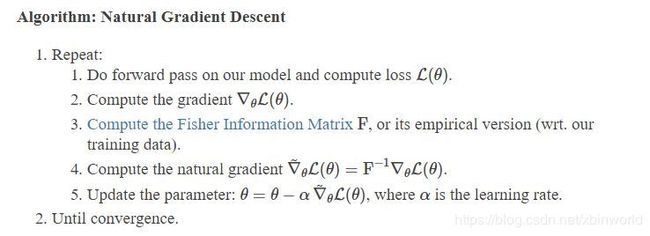
我们把Natural gradient 定义成: ∇ ~ θ L ( θ ) = F − 1 ∇ θ L ( θ ) \tilde{\nabla}_\theta \mathcal{L}(\theta) = \text{F}^{-1} \nabla_\theta \mathcal{L}(\theta) ∇~θL(θ)=F−1∇θL(θ). 自然梯度下降算法的基本流程如下:(一般我们会采用batch模式的Empirical Fisher Matrix: F = 1 N ∑ i = 1 N ∇ log p ( x i ∣ θ ) ∇ log p ( x i ∣ θ ) T \text{F} = \frac{1}{N} \sum_{i=1}^{N} \nabla \log p(x_i \vert \theta) \, \nabla \log p(x_i \vert \theta)^{\text{T}} F=N1∑i=1N∇logp(xi∣θ)∇logp(xi∣θ)T)
与Adam关系的类比讨论
在数据量较少的非常简单的模型中,我们看到可以很容易地实现自然梯度下降。但众所周知,深度学习模型中的参数数目非常大,千万甚至亿级参数量模型很常见,即使一层都有上百万参数。这类模型的Fisher信息矩阵难以计算、存储、以及求逆。这和二阶优化方法在深度学习中不受欢迎的原因是一样的。
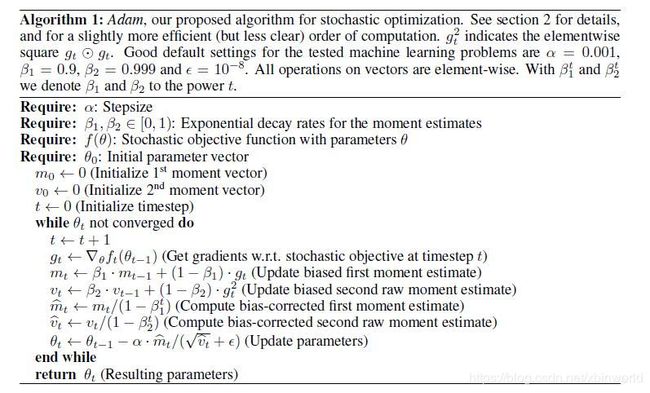
解决这个问题的一种方法是计算近似的Fisher/Hessian。像ADAM[5]这样的方法计算梯度的一阶和二阶moving average(m和v)。m是动量momentum,这里不讨论。而v可以看成是Fisher信息矩阵的近似——但将其约束为对角矩阵(协方差的对角线元素是梯度的平方)。因此,在ADAM中,我们只需要 O ( n ) O(n) O(n)空间来存储(F的近似值)而不是 O ( n 2 ) O(n^2) O(n2),并且可以在 O ( n ) O(n) O(n)而不是 O ( n 3 ) O(n^3) O(n3)中进行求逆运算。在实践中,ADAM工作得非常好,是目前优化深层神经网络的基准优化方法。
OK,这一篇终于基本写好了,后面会继续这个话题,再记录一下如何加速自然梯度方法的工作,主要是比较知名的K-FAC算法。这篇可能还有一些关于自然梯度的引申讨论,过几天再补。参考[6][7]。TBD…
参考资料
[1] https://wiseodd.github.io/techblog/2018/03/11/fisher-information/
[2] https://wiseodd.github.io/techblog/2018/03/14/natural-gradient/
[3] Martens, James. “New insights and perspectives on the natural gradient method.” arXiv preprint arXiv:1412.1193 (2014).
[4] Ly, Alexander, et al. “A tutorial on Fisher information.” Journal of Mathematical Psychology 80 (2017): 40-55
[5] ADAM A METHOD FOR STOCHASTIC OPTIMIZATION. 2015
[6] 多角度理解自然梯度,https://zhuanlan.zhihu.com/p/82934100
[7] 如何理解 natural gradient descent?,https://www.zhihu.com/question/266846405