【激光雷达】3D激光雷达传感器建图:速腾聚创、velodyne建图过程总结
3D激光雷达建图
目录
1、3D激光驱动安装与点云数据录制
1.1、新建、或者使用现有的ROS的工程:
1.2、下载激光雷达的ROS接口驱动:
1.3、配置主机的IP地址:
1.4、配置出厂标定文件:
1.5、运行驱动程序生成点云消息:
1.6、rviz显示点云图:
1.7、rosbag录制3D点云数据包:
2、将录制的bag点云数据包转换为pcd文件
2.1、用pcl_ros工具 bag_to_pcd将数据包转为pcd文件:
2.2、pcl_viewer查看pcd文件:
2.2.1、安装pcl库
2.2.2、按照pcl工具包
2.2.3、pcl_viewer查看pcd点云图文件
1、3D激光驱动安装与点云数据录制
参考:
速腾:
https://github.com/RoboSense-LiDAR/ros_rslidar
《RS-Lidar-16用户手册v3.7.pdf》
velodyne:
https://github.com/ros-drivers/velodyne
https://blog.csdn.net/weixin_38745922/article/details/71639118
1.1、新建、或者使用现有的ROS的工程:
mkdir -p catkin_ws/src
cd catkin_ws/src
cd ..
catkin_make
1.2、下载激光雷达的ROS接口驱动:
速腾:
git clone https://github.com/RoboSense-LiDAR/ros_rslidar.git
更改cfg文件权限:
cd ~/catkin_ws/src/ros_rslidar/rslidar_drvier
chmod 777 cfg/*
cd ~/catkin_ws/src/ros_rslidar/rslidar_pointcloud
chmod 777 cfg/*
velodyne:
git clone https://github.com/ros-drivers/velodyne.git
catkin_make
source devel/setup.bash
1.3、配置主机的IP地址:
主机IP地址:192.168.1.102 (速腾默认的主机IP地址)
速腾聚创:
激光传感器IP :192.168.1.200 (可以通过厂家提供的软件RSView配置)
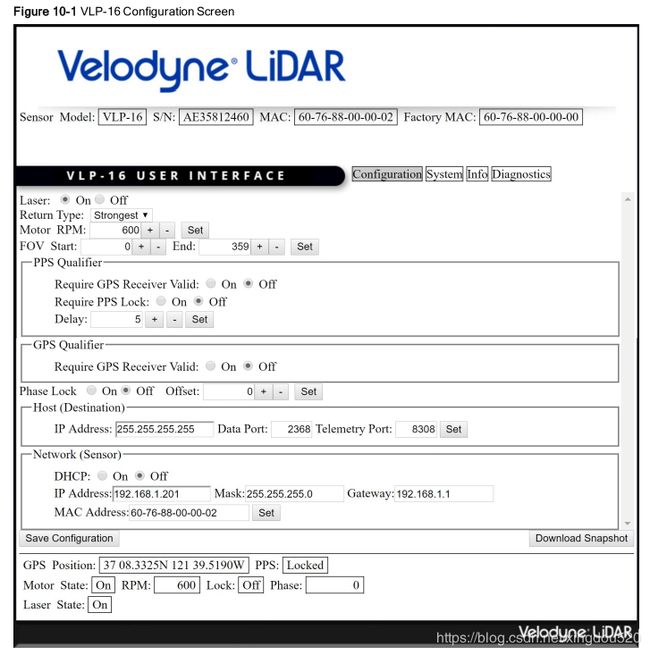
velodyne: 可通过浏览器直接输入其IP地址来配置其参数、升级固件、故障诊断
默认IP :192.168.1.201

GPS数据正常:
1.4、配置出厂标定文件:
速腾聚创:
将厂家给的U盘内的configuration_data文件内的三个文件放到rslidar_pointcloud包的如下目录
- rslidar_pointcloud/data/rs_lidar_16/angle.csv
- rslidar_pointcloud/data/rs_lidar_16/ChannelNum.csv
- rslidar_pointcloud/data/rs_lidar_16/curves.csv.
Velodyne:
厂家附赠U盘里有个标定文件:VLP-16.xml
通过velodyne的驱动程序将其转换生成程序需要的标定文件VLP16db.yaml:
生成配置文件放到 velodyne_pointclount/params/ 目录:(/launch/VLP16_points.launch文件会用到VLP16db.yaml)
rosrun velodyne_pointcloud gen_calibration.py ~/catkin_ws/velodyne/velodyne_pointcloud /params/VLP16db.xml

1.5、运行驱动程序生成点云消息:
cd ~/catkin_ws
source devel/setup.bash
速腾:
roslaunch rslidar_pointcloud rs_lidar_16.launch
velodyne:
roslaunch velodyne_pointcloud VLP16_points.launch
也可以指定标定文件位置:
roslaunch velodyne_pointcloud VLP16_points.launch calibration:=/home/phd/VLP16db.yaml
1.6、rviz显示点云图:
打开新的终端直接输入: rviz
速腾:
修改Global Options/Fixed Frame为rslidar
然后在rviz中点Add,By Topic增加lidar_points/PointCloud2,即可实时显示获取的3D点云数据。

velodyne:
修改Global Options/Fixed Frame为velodyne

然后在rviz中点Add,By Topic增加velodyne_points/PointCloud2,即可实时显示获取的3D点云数据。

1.7、rosbag录制3D点云数据包:
速腾:
rostopic list 查看当前所有主题
cd ~/ (cd到要保存数据包的位置)
录制指定的/lidar_points主题的数据
rosbag record /lidar_points
Ctrl+C 结束路包
可以通过-o指定数据数据包的名称:最后存储格式为bag_name_日期.bag
rosbag record -o bag_name /lidar_points
播放数据包:rosbag play 2018-12-02-21-11-16.bag

velodyne:
rosbag record /velodyne_points
2、将录制的bag点云数据包转换为pcd文件
2.1、用pcl_ros工具 bag_to_pcd将数据包转为pcd文件:
rosrun pcl_ros bag_to_pcd 2018-12-02-21-11-16.bag /lidar_points pcd
转换成的pcd文件会存到指定的pcd目录下,因为这个不是每一帧实时的点云图,而是逐步积累匹配合成的整体点云图,所以我们选最后一张pcd文件,即是完整建好的点云图。
2.2、pcl_viewer查看pcd文件:
2.2.1、安装pcl库
通过PPA安装,简单快速,不过多解释,若此方打失败,可尝试方法二。
add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl
apt-get update
apt-get install libpcl-all
2.2.2、按照pcl工具包
sudo apt-get install pcl-tools
2.2.3、pcl_viewer查看pcd点云图文件
终端输入:
pcl_viewr path/file.pcd 可直接显示pcd点云文件。
pcl_viewr几个常用的命令:
r键: 重现视角。如果读入文件没有在主窗口显示,不妨按下键盘的r键一试。
j键:截图功能。
g键:显示/隐藏 坐标轴。
鼠标:左键,使图像绕自身旋转; 滚轮, 按住滚轮不松,可移动图像,滚动滚轮,可放大/缩小 图像; 右键,“原地” 放大/缩小。
-/+:-(减号)可缩小点; +(加号),可放大点。
pcl_viewe -bc r,g,b /path/to/.pcd:可改变背景色.
pcl_viewer还可以用来直接显示pfh,fpfh(fast point feature histogram),vfh等直方图。
按键盘h(获取帮助)的方式获得.
pcl_viewer显示点云图效果: