数据结构——图的概述
引言
首先介绍图的基本概念,然后介绍两种实现图的方式,最后探讨一些相关算法。
本文相关代码实现涉及到栈和队列的请访问:栈和队列的实现
基本概念
以下基本概念转自数据结构:图概念与基本图实现
图是由顶点 V V V集和边 E E E集构成,因此图可以表示成 G = ( V , E ) G=(V, E) G=(V,E)。
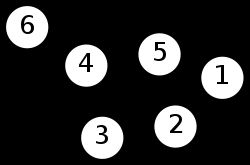
就是无向图,我们可以说这张图中,有点集 V = { 1 , 2 , 3 , 4 , 5 , 6 } V=\{1, 2, 3, 4, 5, 6\} V={1,2,3,4,5,6},边集 E = { ( 1 , 2 ) , ( 1 , 5 ) , ( 2 , 3 ) , ( 2 , 5 ) , ( 3 , 4 ) , ( 4 , 5 ) , ( 4 , 6 ) } E=\{(1, 2), (1, 5), (2, 3), (2, 5), (3, 4), (4, 5), (4, 6)\} E={(1,2),(1,5),(2,3),(2,5),(3,4),(4,5),(4,6)}。在无向图中,边 ( u , v ) (u, v) (u,v)和边 ( v , u ) (v, u) (v,u)是一样的,因此只要记录一个就行了。也就是说方向是无关的。
有向图也很好理解,就是加上了方向性,顶点 ( u , v ) (u, v) (u,v)之间的关系和顶点 ( v , u ) (v,u) (v,u)之间的关系不同。例如你欠我的钱和我欠你的钱是万万不能混淆的。
加权图:与加权图对应的就是无权图,或叫等权图。如果一张图不含权重信息,我们就认为边与边之间没有差别。不过,具体建模的时候,很多时候都需要有权重,比如对中国重要城市间道路联系的建模,总不能认为从北京去上海和从北京去广州一样远(等权)。
完全图:每一对顶点间都存在一条边的图。
无向图中,任意两个顶点间都有边,称为无向完全图。
-
两个重要关系:
- 邻接(adjacency):邻接是两个顶点之间的一种关系。如果图包含 ( u , v ) (u,v) (u,v),则称顶点 v v v与顶点 u u u邻接。当然,在无向图中,这也意味着顶点 u u u与顶点 v v v邻接。
- 关联(incidence):关联是边和顶点之间的关系。在有向图中,边 ( u , v ) (u,v) (u,v)从顶点 u u u开始关联到 v v v,或者相反,从 v v v关联到 u u u。
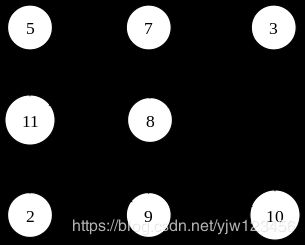
注意,有向图中,边不一定是对称的,有去无回是完全有可能的。细化这个概念,就有了顶点的入度(in-degree)和出度(out-degree)。无向图中,顶点的度就是与顶点相关联的边的总数,没有入度和出度。在有向图中,我们以上图为例,顶点10有2个入度, 3 → 10 3\rightarrow10 3→10, 11 → 10 11\rightarrow10 11→10,但是没有从10指向其它顶点的边,因此顶点10的出度为0。
路径(path):依次遍历顶点序列之间的边所形成的轨迹。注意,依次就意味着有序,先1后2和先2后1不一样。
简单路径:没有重复顶点的路径称为简单路径。说白了,这一趟路里没有出现绕了一圈回到同一点的情况,也就是没有环。
环:包含相同的顶点两次或者两次以上。上图中的顶点序列 < 1 , 2 , 4 , 3 , 1 > <1,2,4,3,1> <1,2,4,3,1>,1出现了两次,当然还有其它的环,比如 < 1 , 4 , 3 , 1 > <1,4,3,1> <1,4,3,1>。
无环图:没有环的图,其中,有向无环图有特殊的名称,叫做DAG(Directed Acyline Graph)(最好记住,DAG具有一些很好性质,比如很多动态规划的问题都可以转化成DAG中的最长路径、最短路径或者路径计数的问题)。
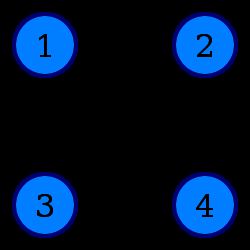
连通的:无向图中每一对不同的顶点之间都有路径。如果这个条件在有向图里也成立,那么就是强连通的。下图中的图不是连通的,因为看到 a a a和 d d d之间没有通路。

连通分量:不连通的图是由2个或者2个以上的连通子图组成的。这些不相交的连通子图称为图的连通分量。
比如下图中有三个连通分量
有向图的连通分量:如果某个有向图不是强连通的,而将它的方向忽略后,任何两个顶点之间总是存在路径,则该有向图是弱连通的。若有向图的子图是强连通的,且不包含在更大的连通子图中,则可以称为有向图的强连通分量。
下图中, a a a、 e e e没有到 { b , c , d } \{b,c,d\} {b,c,d}中的顶点的路径,所以各自是独立的连通分量。因此,图中有三个强连通分量,用集合写出来就是: { { a } , { e } , { b , c , d } } \{\{a\}, \{e\}, \{b, c, d\}\} {{a},{e},{b,c,d}}(已经用不同颜色标出)。
关节点(割点):某些特定的顶点对于保持图或连通分支的连通性有特殊的重要意义。如果移除某个顶点将使图或者分支失去连通性,则称该顶点为关节点。如下图中的 c c c。
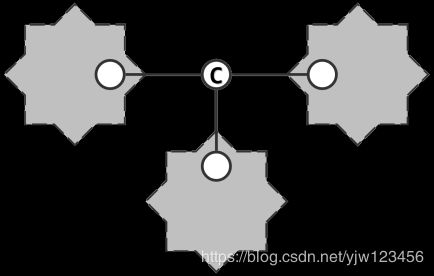
关节点的重要性不言而喻。如果你想要破坏互联网,你就应该找到它的关节点。同样,要防范敌人的攻击,首要保护的也应该是关节点。在资源总量有限的前提下,找出关节点并给予特别保障,是提高系统整体稳定性和鲁棒性的基本策略。
桥(割边):和关节点类似,删除一条边,就产生比原图更多的连通分支的子图,这条边就称为割边或者桥。
实现方式
常见的实现方式有两种
邻接矩阵

假定图中顶点数为v,邻接矩阵通过长、宽都为v的二维数组实现,若稀疏图(图中边的数目较少)通过邻接矩阵,会浪费很多内存空间。
邻接链表
通过代码实现时,我们进行一个优化,不使用链表这种数据结构,而是用集合(不会存在相同元素)。这种实现方式也可以叫做邻接集。
无向图的邻接链表实现见: 无向图的邻接集实现
有向图的邻接链表实现见: 有向图的邻接集实现
相关算法
无向图
无向图的深度优先搜索和广度优先搜索寻路
无向图的连通分量计算
有向图
在有向图中,边是有方向的。有向图中,顶点的出度为该顶点出发的边的总数,入度为指向该顶点的边的总数。
我们重点学习下有向图的算法,有:
- 有向图的可达性与寻路
- 环和有向无环图相关算法 包括调度问题、检测是否有环、拓扑排序
- 有向图的强连通分量计算算法详解
最小生成树
加权图是一种为每条边关联一个权值(可表示成本、时间等)的图模型。这种图能表示许多场景,如航空图中边表示航线,权值表示距离或费用。在航空图中,通常的问题是如何使距离或费用最小化。
我们可以通过加权无向图的最小生成树来解决这个问题。
图的生成树:是它的一颗含有其他所有顶点的无环连通子图。一幅加权无向图的最小生成树(MST)是它的一颗权值最小的生成树(树中所有边的权值之和最小)。
我们会一起学习计算最小生成树的两种经典算法:Prime算法和Kruskal算法。
首先有几个注意点:
- 只考虑连通图
- 边的权值可以表示距离、时间、费用或其他变量
- 边的权重可能是0或负数
- 所有边的权重都不相同
我们要在一幅加权连通无向图中找到它的最小生成树。
首先定义一下加权无向图的数据结构
最小生成树算法:Prim算法和Kruskal算法
最短路径
我经常用百度地图来获取从A地到B地最快的走法是什么。该问题的其实就是最短路径问题:找到从一个顶点到达另一个顶点的成本(时间)最小的路径。
我们采用加权有向图模型作为数据结构。
在一幅加权有向图中,从顶点s到顶点t的最短路径是所有从s到t的路径中的权重最小者
单点最短路径:给定一幅加权有向图和一个起点s,找出最短(总权重最小)的那条路径。
首先定义加权有向图的数据结构
然后给出图的最短路径算法实现