YOLOV2
继YOLOV1之后,这篇文章主要讲解YOLOV2,YOLOV2可以说是在YOLOV1的基础之上采取了一系列的trick去进行改进。YOLOV2在YOLOV1的基础之上效果也有了明显的提升,接下来开始介绍YOLOV2的改进之处。
一.增加BN层
相对于YOLOV1,YOLOV2中加入了batch normalization层,加入BN层之后作者发现对于模型收敛有着明显的提升,并且发现BN层后将Dropout层去掉也并不影响预测精度,模型也并没有发生overfitting,因此BN层也可以起到正则化模型的作用。最终通过加入BN层,模型的mAP值提升了2%。
二.高像素的分类器
在YOLOV1中,使用的是在Imagenet上预训练的模型,而在Imagenet上训练使用的图像尺寸基本都小于256 * 256,但是在自己数据集训练时使用的时448 * 448的图像尺寸,这样就带来一个问题,模型不能够迅速适应当前448 * 448尺寸的图像输入。因此在YOLOV2中,首先获取Imagenet上预训练的模型,随后在448 * 448尺寸的Imagenet数据集上首先fine tune10个epoch,最后再在自己的数据集上进行fine tune,这样使得模型可以能够适应图像尺寸的转变,这个技巧使得模型提升了4%的mAP值。
三.全卷积网络与Anchor boxes
在YOLOV1中,模型最终使用了全连接层,通过对全连接层变形得到一个7 * 7 * 30的tensor作为模型输出。而在YOLO V2中取消了全连接层,整个网络采用一个全卷积的网络,那么网络输出就是一个feature map,将feature map的每一个像素当作一个anchor,一个anchor可以设置多个尺寸不同的anchor boxes,YOLOV2中仍然采用了anchor boxes去预测真实的bounding box。作者移除了之前YOLOV1中的一个池化层使得模型最终输出的feature map有着更高的像素,并且将模型输入图像尺寸由448改为了416,这是因为大部分物体都是处于图像的中间位置,而如果网络输出一个偶数尺寸的feature map,则在中心位置没有anchor,这样对于预测中间物体来说就不是那么的容易了,因此改变图像输入尺寸可以使得模型最终输出的feature map时一个奇数尺寸。YOLOV2中,整个网络相当于对图片进行了一个32倍的下采样,因此模型的输出尺寸为416 / 32 = 13,相当于有13 * 13个anchor。
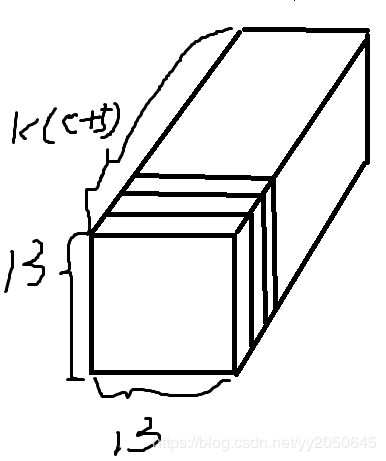
YOLOV2仍然使用YOLOV1的方式,对于每一个anchor box,除了位置信息(x, y, w, h),还要预测confidence和每个类别的条件概率prob(Class_i|object),i=1,...,C,C为物体类别数目,这里的confidence和YOLO V1中的一致,也是prob(object) * iou,这里的prob(object)表示当前anchor box存在一个物体的概率,这里的iou是通过当前anchor box所预测得到的bounding box和ground truth bounding box的iou,因此从这里可以看出一点优于YOLOV1的就是,对于每个anchor box都会预测一个类别,那么这样就不存在YOLOV1中一个grid cell只能预测一个类别的情况,比如有3个同类物体中心落入了同一个grid cell,YOLOV1只能检测出其中的两个,或者说有2个不同类别物体中心落入了同一个grid cell则YOLOV1只能检测出其中的一个,YOLOV2对于这种情况有了很好的改善,其每个grid cell可以预测不同类别的物体,可预测数目为模型设置的每个anchor/grid cell的anchor box数目。通过上述我们可以得知,针对每个anchor box模型最终输出一个(4 + 1 + C)长度的tensor,那针对每一个anchor模型输出的是k * (4 + 1 + C)长度的tensor,k为每个anchor的anchor box数目,C为物体类别数目。因此模型最终输出的形状为(13, 13 , k * (5 + C)),通道数为k * (5 + C),如下图所示:
采用anchor box的策略使模型的mAP值略微下降,但是召回率有了极大的提升,从81%提升至88%,并且还有一点就是,YOLOV1中一张图最多只能同时检测49 * 2=98个物体,但是YOLO V2最多可以同时检测13 * 13 * k个物体。
四.维度聚类
维度聚类是YOLOV2中的一个重要改进,其作用就是相比于原先类似于RPN网络那样人工手动先验的设置anchor boxes,这里是通过聚类的方式来得到ancbor boxes的。作者认为,类似于RPN那样的手工先验的选取anchor box当然可以,模型在训练过程中也会通过先验手选出的anchor box不断调整找到所要预测的bounding box的位置,但是如果能够一开始就设置质量较高的anchor box对于模型训练和检测来说会有更好的效果。
作者的想法使这样的,首先看一下训练集中大部分物体的ground truth bounding box都是些什么形状的,那么anchor box就设置成这些形状。具体做法如下,首先将所有训练集中的物体的bounding box的(h, w)取出,注意这里不考虑bounding box的中心坐标(x, y)的信息,那么就取出一组数据,假设训练集一共有n个bounding box,则取出的数据形状为(n, 2),即n行两列,每一行为一个bounding box的高宽信息,也是聚类时使用的一个样本,然后对着n个样本进行kmeans聚类,具体聚多少类可自行设置,比如这里要聚5类那么就选取5个初始聚类中心(h1, w1), (h2, w2), ...(h5, w5),之后进行kmeans聚类,注意kmeans聚类需要计算样本与样本之间的距离,一般采用欧式距离,但是这里如果使用欧式距离大的boxes会产生比小的boxes更大的误差,因此这里使用如下公式作为距离度量:

可以看出,如果boudning box和聚类中心的iou越大则说明此bounding box和聚类中心的形状越相似,则距离越小,上式的设计正好符合这种条件。然后进行聚类迭代即可得到最终的5个聚类中心,则这五个聚类中心就作为最终的anchor boxes,当然如果聚类中心更多则可以得到更多的anchor boxes。下图为作者聚类结果
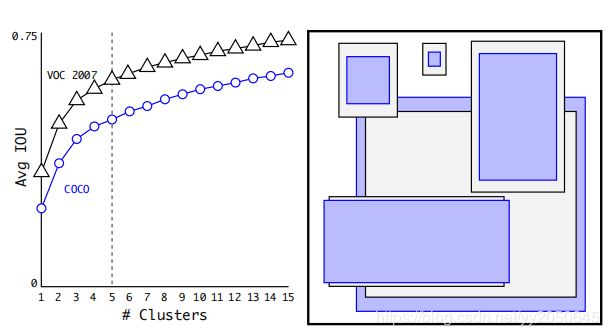
可以看到,聚类中心越多则平均iou越大,这不难想象,比如前面所说共有n个样本,那如果我们聚n类,则每个样本时一个聚类中心,则平均iou为1。更多的聚类中心平局iou更大,anchor boxes形状更贴近于ground truth,模型的召回率就越高,但是模型的计算复杂度也随之上升,因此这里对于召回率和模型复杂度做了一个tradeoff,选取聚类中心数目(anchor boxes数目)为5。从上图右图中可以看到,训练集中貌似瘦高形状的bounding box更多一些。
以下是我在复现yolov2时对voc 2012数据集自己划分训练集和验证集合后,对训练集的bounding box的聚类结果,这里我使用的时kmeans++,因为初始聚类中心的选取对于kmeans的聚类效果有较大的影响,如果初始点选不好则聚类效果也不好,因此这里我采用kmeans++来代替kmeans,kmeans++对于初始聚类中心的选取有更好的自适应性:
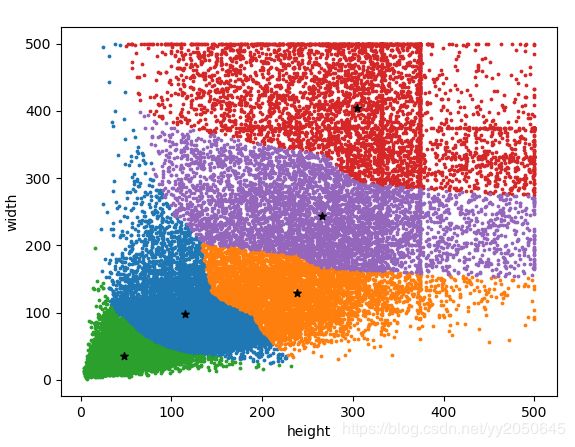
五个聚类中心(h, w)分别为: [array([114.94166885, 98.62058593]), array([237.84242061, 128.4799281 ]), array([47.17747217, 34.89194499]), array([304.95433281, 404.73914012]), array([265.41587211, 243.91430193])]
可以看到,确实瘦高的bounding box比较多。
五.直接预测位置
作者认为,类似于RPN那样的通过anchor box的中心坐标预测Bounding box的中心位置是一件糟糕的事情,其公式如下所示

注意原论文中公式写错了,右边的减号需要改为加号。tx和ty为模型输出的-1到1之间的两个数值。上式可以理解为anchor box的中心坐标加上或减去全图尺寸的一个百分比(tx, ty)作为模型预测的bounding box的中心坐标,那么作者认为这样增加了模型训练的不稳定性,因为按照这样的计算方法,预测的bounding box可以满图乱飘。
那么YOLOV2中仍然采用了YOLOV1中的方法,其只预测bounding box的中心点相对于grid cell左上角点的偏移量,因此预测bounding box的中心点不会用到anchor box的信息。
对于bounding box的预测,首先给出下图,然后对其进行解释:
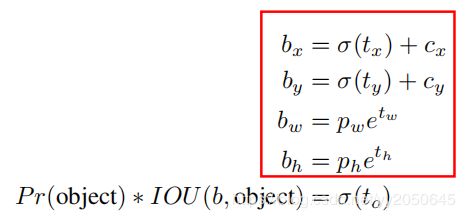
如果之前聚类聚出5个簇,也就是说一个grid cell有5个anchor boxes,因此一个grid cell负责预测5个bounding box。上式中tx, ty, tw, th, to为每个anchor box都要预测的除了类别条件概率之外的5个值,也是模型的输出值,范围再负无穷到正无穷,tx, ty, tw, th代表位置信息,to代表confidence,可以看出其confidence值和YOLOV1中计算方法一致。confidence计算结果一定为0到1之间的数值,因此可以看出σ函数实际就是将数值压缩到0到1之间,可以是一个sigmoid函数。
这里的cx,cy表示的是当前grid cell相对于全图的左上角在分别在x和y方向的偏移量(注意是偏移了多少个grid cell,而不是真实的原图尺寸),例如模型输出为13 * 13的feature map,也就是将原图划分为13 * 13个grid cell,如果某一物体落入了索引为(2, 3)grid cell中(索引从0开始计算),则cy为2,cx为3。σ(tx)和σ(ty)实际得到的是0到1之间的数值,代表着在物体所落入的grid cell中,物体的中心坐标相对于这个grid cell左上角点的横向和纵向偏移量,可以理解为便宜了小数个grid cell,那么物体中心相对于全图左上角点的横向和纵向偏移量就为σ(tx) + cx,σ(ty) + cy也就是bx,by,那么就可以说物体中心点相对于左上角点横向偏移了bx个grid cell,纵向偏移了by个grid cell。最终使用bx和by分别乘以单个网格的宽和高就得到了物体在原图真实坐标。
这里bw和bh实际不用多说,和中心点预测不同,这里bw和bh得到的就是真实的宽高,而其预测使用了anchor boxes的宽高pw和ph的信息,并且预测方法和RCNN中的边框回归一样。注意tw,和th才是模型的输出,也就是模型实际预测的是log(bw / pw)以及log(bh / ph),模型输出tw和th后通过上式就可以计算出预测的bounding box真实宽高了。
六.细粒度特征
作者认为,由于网络最终降采样32倍,得到一个13 * 13的feature map用来预测,但是这个尺寸的feature map中每一个像素的感受野都很大,因此对于大目标的检测应该不错,但是对于小物体的检测却不是那么好,因此模型的输出需要融入更细粒度的特征。那么具体做法为,在网络中添加了一个passthrough层,这个层的作用就是将网络靠前的某一层的feature map引入到最后的模型输出中,文中选取某某个卷积层,其输出为26 * 26 * 512 的feature map,那么这个feature map的感受野相对于13 * 13就小了。那怎么将其融入到最后的13 * 13的输出中去呢,其实很简单,就是沿着通道方向进行一个concatenate,那么问题来了,尺寸不一致如何进行concatenate呢?实际上文中就是将26 * 26 * 512reshape成了13 * 13 * 2048,那么这样就可以进行concatenate了。这一操作带来了1%的提升。
七.多尺度训练
因为模型是全卷积结构,因此网络能够跑通各种尺度的图像输入,因此作者就希望模型能够适应多尺度的输入,预测时能够通过不同尺度的输入来进行预测。在训练过程中图像输入尺寸不是一成不变416了,而是每10个batch进行一次转变。由于网络相当于对图像进行了32倍下采样,候选的图像尺寸必须为32的倍数,原文中采用的时{320, 352, ...., 608}这几个尺寸,网络每训练10个batch就随机选择一个图像尺寸进行训练。输入尺寸变了,输出尺寸也就随之改变,例如输入为320则输出为10 * 10尺寸,那么网络就相当于有10 * 10个anchor。
大尺寸输入,网络预测精度较高,但是网络预测速度较慢,而小尺寸的输入预测精度较低,但是速度更快,那么这样就可以根据自己的应用场景在速度和精度之间做一个tradeoff了,如果对于速度没有特别的要求,对于精度要求高那么就采用大尺度输入,否则就采用小尺度输入。
那最后看一下yolov2和其他state-of-the-art模型的对比:
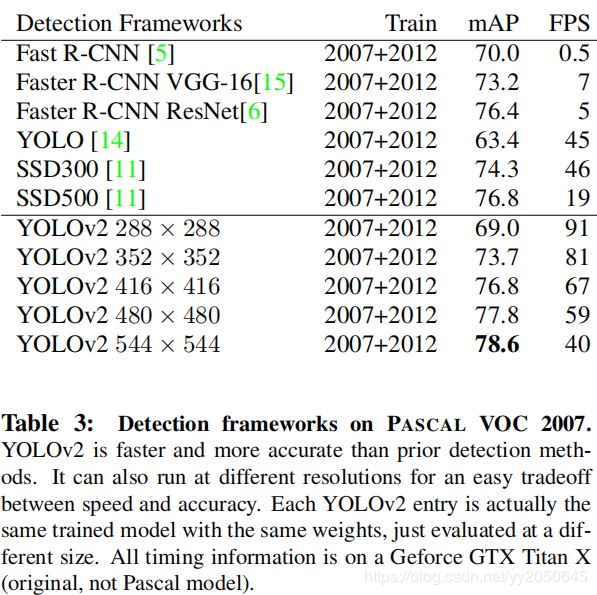
可以看到,Yolov2相比与其他模型有更高的准确率以及更快的检测速度。
下图为在YOLOV1上逐步加入各个trick,mAP的变化:
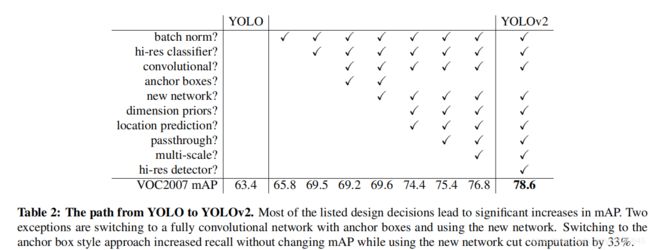
可以看到YOLOV2在加上各个trick后比YOLO确实提升了很多。