wider face data 在 faster rcnn 上的实践记录(caffe)
按照githup上playerkk的工程进行实践,地址为:https://github.com/playerkk/face-py-faster-rcnn/blob/master/README.md
1.搭建faster rcnn
这个没什么好说的,参考rbg大神的官网即可,附上地址:https://github.com/rbgirshick/py-faster-rcnn
需要注意的是对于显卡是1080的,因为faster rcnn是基于老版本的cudnn,所以编译的时候会出现许多关于cudnn的报错问题。解决方案推荐的是用caffe中相关的文件替换掉faster rcnn中的相关文件。可参考地址:http://blog.csdn.net/u010733679/article/details/52221404。
2.克隆工程及下载预训练参数文件
git clone --recursive https://github.com/playerkk/face-py-faster-rcnn.git在工程的根目录下执行:
cd face-py-faster-rcnn
./data/scripts/fetch_faster_rcnn_models.sh

会在data下出现 faster rcnn models.tgz。
3.下载wider face data数据
网站下载地址为:http://mmlab.ie.cuhk.edu.hk/projects/WIDERFace/

下载三个数据文件到一个目录中,我选择的是ubuntu的home目录下:
如图所示进行分布。
图中的最后一个文本文件从该网址下载:https://people.cs.umass.edu/~hzjiang//files/wider_face_train_annot.txt 。按照的是FDDB的格式。
![]()
![]()
在如图所示的data目录下建立symlinks:

会在工程的data目录下出现链接,如上图所示。
4.下载预训练的Imagenet模型
![]()
在工程目录下执行上图所示命令。

接下来就是开始执行训练的过程:
在工程的根目录下执行命令:
![]()

++++++++++++++++++++++++2017.0224++++++++++++++++++++更新+++++++++++++++++++++++++++
+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
更新工程后我的train_net.py文件内容为:
#!/usr/bin/env python
# --------------------------------------------------------
# Fast R-CNN
# Copyright (c) 2015 Microsoft
# Licensed under The MIT License [see LICENSE for details]
# Written by Ross Girshick
# --------------------------------------------------------
"""Train a Fast R-CNN network on a region of interest database."""
# import matplotlib
# matplotlib.use('Agg')
import _init_paths
from fast_rcnn.train import get_training_roidb, train_net
from fast_rcnn.config import cfg, cfg_from_file, cfg_from_list, get_output_dir
from datasets.factory import get_imdb
import datasets.imdb
import caffe
import argparse
import pprint
import numpy as np
import sys
def parse_args():
"""
Parse input arguments
"""
parser = argparse.ArgumentParser(description='Train a Fast R-CNN network')
parser.add_argument('--gpu', dest='gpu_id',
help='GPU device id to use [0]',
default=0, type=int)
parser.add_argument('--solver', dest='solver',
help='solver prototxt',
default=None, type=str)
parser.add_argument('--iters', dest='max_iters',
help='number of iterations to train',
default=40000, type=int)
parser.add_argument('--weights', dest='pretrained_model',
help='initialize with pretrained model weights',
default=None, type=str)
parser.add_argument('--cfg', dest='cfg_file',
help='optional config file',
default=None, type=str)
parser.add_argument('--imdb', dest='imdb_name',
help='dataset to train on',
default='voc_2007_trainval', type=str)
parser.add_argument('--rand', dest='randomize',
help='randomize (do not use a fixed seed)',
action='store_true')
parser.add_argument('--set', dest='set_cfgs',
help='set config keys', default=None,
nargs=argparse.REMAINDER)
if len(sys.argv) == 1:
parser.print_help()
sys.exit(1)
args = parser.parse_args()
return args
def combined_roidb(imdb_names):
def get_roidb(imdb_name):
imdb = get_imdb(imdb_name)
print 'Loaded dataset `{:s}` for training'.format(imdb.name)
imdb.set_proposal_method(cfg.TRAIN.PROPOSAL_METHOD)
print 'Set proposal method: {:s}'.format(cfg.TRAIN.PROPOSAL_METHOD)
roidb = get_training_roidb(imdb)
return roidb
roidbs = [get_roidb(s) for s in imdb_names.split('+')]
roidb = roidbs[0]
if len(roidbs) > 1:
for r in roidbs[1:]:
roidb.extend(r)
imdb = datasets.imdb.imdb(imdb_names)
else:
imdb = get_imdb(imdb_names)
return imdb, roidb
if __name__ == '__main__':
args = parse_args()
print('Called with args:')
print(args)
if args.cfg_file is not None:
cfg_from_file(args.cfg_file)
if args.set_cfgs is not None:
cfg_from_list(args.set_cfgs)
cfg.GPU_ID = args.gpu_id
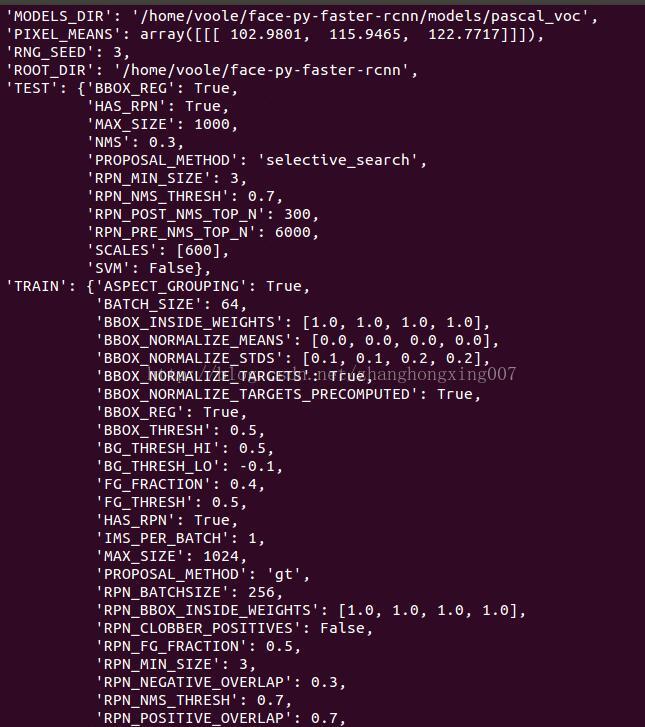
print('Using config:')
pprint.pprint(cfg)
if not args.randomize:
# fix the random seeds (numpy and caffe) for reproducibility
np.random.seed(cfg.RNG_SEED)
caffe.set_random_seed(cfg.RNG_SEED)
# set up caffe
caffe.set_mode_gpu()
caffe.set_device(args.gpu_id)
imdb, roidb = combined_roidb(args.imdb_name)
print '{:d} roidb entries'.format(len(roidb))
output_dir = get_output_dir(imdb)
print 'Output will be saved to `{:s}`'.format(output_dir)
train_net(args.solver, roidb, output_dir,
pretrained_model=args.pretrained_model,
max_iters=args.max_iters)
# --------------------------------------------------------
# Fast R-CNN
# Copyright (c) 2015 Microsoft
# Licensed under The MIT License [see LICENSE for details]
# Written by Ross Girshick
# --------------------------------------------------------
# import datasets.face
# import os
# import datasets.imdb as imdb
# import xml.dom.minidom as minidom
# import numpy as np
# import scipy.sparse
# import scipy.io as sio
# import utils.cython_bbox
# import cPickle
# import subprocess
import os
from datasets.imdb import imdb
import datasets.ds_utils as ds_utils
import xml.etree.ElementTree as ET
import numpy as np
import scipy.sparse
import scipy.io as sio
import utils.cython_bbox
import cPickle
import subprocess
import uuid
from voc_eval import voc_eval
from fast_rcnn.config import cfg
import cv2
import PIL
class face(imdb):
def __init__(self, image_set, split, devkit_path):
imdb.__init__(self, 'wider')
self._image_set = image_set # {'train', 'test'}
self._split = split # {1, 2, ..., 10}
self._devkit_path = devkit_path # /data2/hzjiang/Data/CS2
# self._data_path = os.path.join(self._devkit_path, 'data')
self._data_path = self._devkit_path;
self._classes = ('__background__', # always index 0
'face')
self._class_to_ind = dict(zip(self.classes, xrange(self.num_classes)))
self._image_ext = ['.png']
self._image_index, self._gt_roidb = self._load_image_set_index()
# Default to roidb handler
self._roidb_handler = self.selective_search_roidb
# Specific config options
self.config = {'cleanup' : True,
'use_salt' : True,
'top_k' : 2000}
assert os.path.exists(self._devkit_path), \
'Devkit path does not exist: {}'.format(self._devkit_path)
assert os.path.exists(self._data_path), \
'Path does not exist: {}'.format(self._data_path)
def image_path_at(self, i):
"""
Return the absolute path to image i in the image sequence.
"""
return self.image_path_from_index(self._image_index[i])
def image_path_from_index(self, index):
"""
Construct an image path from the image's "index" identifier.
"""
for ext in self._image_ext:
image_path = os.path.join(self._data_path, index)
if os.path.exists(image_path):
break
assert os.path.exists(image_path), \
'Path does not exist: {}'.format(image_path)
return image_path
def _load_image_set_index(self):
"""
Load the indexes listed in this dataset's image set file.
"""
# # Example path to image set file:
# # self._data_path + /ImageSets/val.txt
# # read from file
# image_set_file = 'split%d/%s_%d_annot.txt' % (self._fold, self._image_set, self._fold)
# # image_set_file = os.path.join(self._devkit_path, image_set_file)
# image_set_file = os.path.join('/home/hzjiang/Code/py-faster-rcnn/CS3-splits', image_set_file)
image_set_file = self._name + '_face_' + self._image_set + '_annot.txt'
image_set_file = os.path.join(self._devkit_path, image_set_file)
# image_set_file = 'cs3_rand_train_annot.txt'
# image_set_file = 'wider_dets_annot_from_cs3_model.txt'
# image_set_file = 'wider_manual_annot.txt'
assert os.path.exists(image_set_file), \
'Path does not exist: {}'.format(image_set_file)
image_index = []
gt_roidb = []
with open(image_set_file) as f:
# print len(f.lines())
lines = f.readlines()
idx = 0
while idx < len(lines):
image_name = lines[idx].split('\n')[0]
image_name = os.path.join('WIDER_%s/images' % self._image_set, image_name)
# print image_name
image_ext = os.path.splitext(image_name)[1].lower()
# print image_ext
assert(image_ext == '.png' or image_ext == '.jpg' or image_ext == '.jpeg')
image = PIL.Image.open(os.path.join(self._data_path, image_name))
imw = image.size[0]
imh = image.size[1]
idx += 1
num_boxes = int(lines[idx])
# print num_boxes
boxes = np.zeros((num_boxes, 4), dtype=np.uint16)
gt_classes = np.zeros((num_boxes), dtype=np.int32)
overlaps = np.zeros((num_boxes, self.num_classes), dtype=np.float32)
for i in xrange(num_boxes):
idx += 1
coor = map(float, lines[idx].split())
x1 = min(max(coor[0], 0), imw - 1)
y1 = min(max(coor[1], 0), imh - 1)
x2 = min(max(x1 + coor[2] - 1, 0), imw - 1)
y2 = min(max(y1 + coor[3] - 1, 0), imh - 1)
if np.isnan(x1):
x1 = -1
if np.isnan(y1):
y1 = -1
if np.isnan(x2):
x2 = -1
if np.isnan(y2):
y2 = -1
cls = self._class_to_ind['face']
boxes[i, :] = [x1, y1, x2, y2]
gt_classes[i] = cls
overlaps[i, cls] = 1.0
widths = boxes[:, 2] - boxes[:, 0] + 1
heights = boxes[:, 3] - boxes[:, 1] + 1
keep_idx = np.where(np.bitwise_and(widths > 5, heights > 5))
if len(keep_idx[0]) <= 0:
idx += 1
continue
boxes = boxes[keep_idx]
gt_classes = gt_classes[keep_idx[0]]
overlaps = overlaps[keep_idx[0], :]
if not (boxes[:, 2] >= boxes[:, 0]).all():
print boxes
print image_name
# print boxes
assert (boxes[:, 2] >= boxes[:, 0]).all()
assert (boxes[:, 3] >= boxes[:, 1]).all()
overlaps = scipy.sparse.csr_matrix(overlaps)
gt_roidb.append({'boxes' : boxes,
'gt_classes': gt_classes,
'gt_overlaps' : overlaps,
'flipped' : False,
'image_name': image_name})
image_index.append(image_name)
idx += 1
assert(idx == len(lines))
return image_index, gt_roidb
def gt_roidb(self):
"""
Return the database of ground-truth regions of interest.
This function loads/saves from/to a cache file to speed up future calls.
"""
cache_file = os.path.join(self.cache_path, self.name + '_gt_roidb.pkl')
if os.path.exists(cache_file):
with open(cache_file, 'rb') as fid:
roidb = cPickle.load(fid)
print '{} gt roidb loaded from {}'.format(self.name, cache_file)
return roidb
with open(cache_file, 'wb') as fid:
cPickle.dump(self._gt_roidb, fid, cPickle.HIGHEST_PROTOCOL)
print 'wrote gt roidb to {}'.format(cache_file)
return self._gt_roidb
def selective_search_roidb(self):
"""
Return the database of selective search regions of interest.
Ground-truth ROIs are also included.
This function loads/saves from/to a cache file to speed up future calls.
"""
cache_file = os.path.join(self.cache_path,
self.name + '_selective_search_roidb.pkl')
if os.path.exists(cache_file):
with open(cache_file, 'rb') as fid:
roidb = cPickle.load(fid)
print '{} ss roidb loaded from {}'.format(self.name, cache_file)
return roidb
if self._image_set != 'test':
gt_roidb = self.gt_roidb()
ss_roidb = self._load_selective_search_roidb(gt_roidb)
roidb = datasets.imdb.merge_roidbs(gt_roidb, ss_roidb)
else:
roidb = self._load_selective_search_roidb(None)
print len(roidb)
with open(cache_file, 'wb') as fid:
cPickle.dump(roidb, fid, cPickle.HIGHEST_PROTOCOL)
print 'wrote ss roidb to {}'.format(cache_file)
return roidb
def _load_selective_search_roidb(self, gt_roidb):
filename = os.path.abspath(os.path.join(self._devkit_path,
self.name + '.mat'))
assert os.path.exists(filename), \
'Selective search data not found at: {}'.format(filename)
raw_data = sio.loadmat(filename)['all_boxes'].ravel()
box_list = []
for i in xrange(raw_data.shape[0]):
boxes = raw_data[i][:, (1, 0, 3, 2)] - 1
assert (boxes[:, 2] >= boxes[:, 0]).all()
box_list.append(boxes)
return self.create_roidb_from_box_list(box_list, gt_roidb)
def selective_search_IJCV_roidb(self):
"""
Return the database of selective search regions of interest.
Ground-truth ROIs are also included.
This function loads/saves from/to a cache file to speed up future calls.
"""
cache_file = os.path.join(self.cache_path,
'{:s}_selective_search_IJCV_top_{:d}_roidb.pkl'.
format(self.name, self.config['top_k']))
if os.path.exists(cache_file):
with open(cache_file, 'rb') as fid:
roidb = cPickle.load(fid)
print '{} ss roidb loaded from {}'.format(self.name, cache_file)
return roidb
gt_roidb = self.gt_roidb()
ss_roidb = self._load_selective_search_IJCV_roidb(gt_roidb)
roidb = datasets.imdb.merge_roidbs(gt_roidb, ss_roidb)
with open(cache_file, 'wb') as fid:
cPickle.dump(roidb, fid, cPickle.HIGHEST_PROTOCOL)
print 'wrote ss roidb to {}'.format(cache_file)
return roidb
def _load_selective_search_IJCV_roidb(self, gt_roidb):
IJCV_path = os.path.abspath(os.path.join(self.cache_path, '..',
'selective_search_IJCV_data',
self.name))
assert os.path.exists(IJCV_path), \
'Selective search IJCV data not found at: {}'.format(IJCV_path)
top_k = self.config['top_k']
box_list = []
for i in xrange(self.num_images):
filename = os.path.join(IJCV_path, self.image_index[i] + '.mat')
raw_data = sio.loadmat(filename)
box_list.append((raw_data['boxes'][:top_k, :]-1).astype(np.uint16))
return self.create_roidb_from_box_list(box_list, gt_roidb)
def _load_face_annotation(self, index):
"""
Load image and bounding boxes info from txt files of face.
"""
filename = os.path.join(self._data_path, 'Annotations', index + '.mat')
data = sio.loadmat(filename)
num_objs = data['gt'].shape[0]
boxes = np.zeros((num_objs, 4), dtype=np.uint16)
gt_classes = np.zeros((num_objs), dtype=np.int32)
overlaps = np.zeros((num_objs, self.num_classes), dtype=np.float32)
# Load object bounding boxes into a data frame.
for ix in xrange(num_objs):
# Make pixel indexes 0-based
coor = data['gt'][ix, :]
x1 = float(coor[0]) - 1
y1 = float(coor[1]) - 1
x2 = float(coor[2]) - 1
y2 = float(coor[3]) - 1
cls = self._class_to_ind['face']
boxes[ix, :] = [x1, y1, x2, y2]
gt_classes[ix] = cls
overlaps[ix, cls] = 1.0
overlaps = scipy.sparse.csr_matrix(overlaps)
if not (boxes[:, 2] >= boxes[:, 0]).all():
print boxes
print filename
assert (boxes[:, 2] >= boxes[:, 0]).all()
return {'boxes' : boxes,
'gt_classes': gt_classes,
'gt_overlaps' : overlaps,
'flipped' : False}
def _write_inria_results_file(self, all_boxes):
use_salt = self.config['use_salt']
comp_id = 'comp4'
if use_salt:
comp_id += '-{}'.format(os.getpid())
# VOCdevkit/results/comp4-44503_det_test_aeroplane.txt
path = os.path.join(self._devkit_path, 'results', self.name, comp_id + '_')
for cls_ind, cls in enumerate(self.classes):
if cls == '__background__':
continue
print 'Writing {} results file'.format(cls)
filename = path + 'det_' + self._image_set + '_' + cls + '.txt'
with open(filename, 'wt') as f:
for im_ind, index in enumerate(self.image_index):
dets = all_boxes[cls_ind][im_ind]
if dets == []:
continue
# the VOCdevkit expects 1-based indices
for k in xrange(dets.shape[0]):
f.write('{:s} {:.3f} {:.1f} {:.1f} {:.1f} {:.1f}\n'.
format(index, dets[k, -1],
dets[k, 0] + 1, dets[k, 1] + 1,
dets[k, 2] + 1, dets[k, 3] + 1))
return comp_id
def _do_matlab_eval(self, comp_id, output_dir='output'):
rm_results = self.config['cleanup']
path = os.path.join(os.path.dirname(__file__),
'VOCdevkit-matlab-wrapper')
cmd = 'cd {} && '.format(path)
cmd += '{:s} -nodisplay -nodesktop '.format(datasets.MATLAB)
cmd += '-r "dbstop if error; '
cmd += 'setenv(\'LC_ALL\',\'C\'); voc_eval(\'{:s}\',\'{:s}\',\'{:s}\',\'{:s}\',{:d}); quit;"' \
.format(self._devkit_path, comp_id,
self._image_set, output_dir, int(rm_results))
print('Running:\n{}'.format(cmd))
status = subprocess.call(cmd, shell=True)
def evaluate_detections(self, all_boxes, output_dir):
comp_id = self._write_inria_results_file(all_boxes)
self._do_matlab_eval(comp_id, output_dir)
def competition_mode(self, on):
if on:
self.config['use_salt'] = False
self.config['cleanup'] = False
else:
self.config['use_salt'] = True
self.config['cleanup'] = True
if __name__ == '__main__':
d = datasets.inria('train', '')
res = d.roidb
from IPython import embed; embed()+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
之后在命令行中输入:voole@zhx:~/face-py-faster-rcnn$ ./experiments/scripts/faster_rcnn_end2end.sh 0 VGG16 wider
输出:

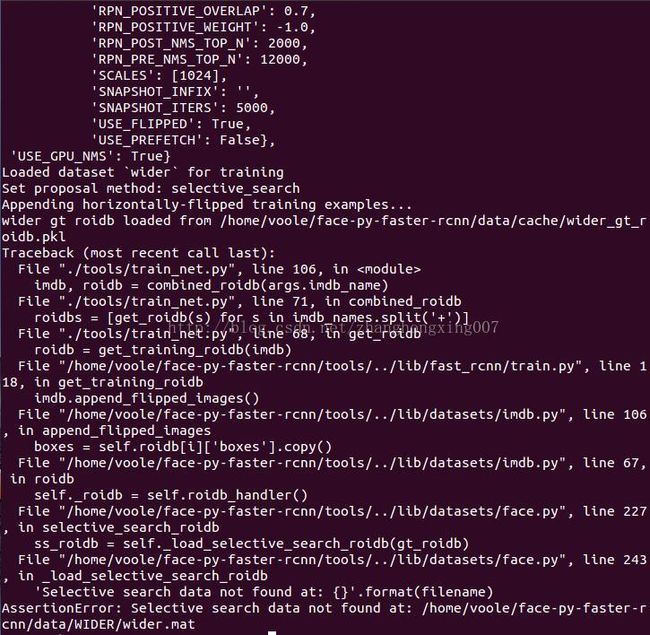
问题已经得到解决了:原因是因为我安装的easydict的版本是1.4,即使我配置了faster_rcnn_end2end.yml,但是easydict并没有将参数传给train_net.py,所以才会出现上述问题,解决方案就是升级你的easydict。