OpenCV下的Lucas-Kanade算法:运动分析和目标跟踪
在本篇博客中一并使用了OpenCV读取摄像头,读取视频等操作,通过光流法,实现目标检测.含义有自己写的代码和官方的代码,实现的方法不尽相同
主要使用如下几个函数:具体使用和注解,看下面代码,
goodFeaturesToTrack
确定图像上的强角点。
cornerSubPix
精确角点的位置。
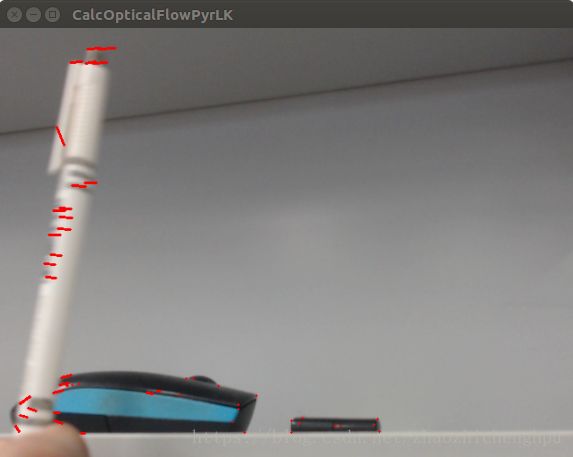
calcOpticalFlowPyrLK
使用具有金字塔的迭代Lucas-Kanade方法计算稀疏特征集的光流。
#include "opencv/cv.h"
#include "opencv/cxcore.h"
#include "opencv/highgui.h"
#include if( featureFound == 0 || featureErrors[i] > 550 ){
continue;
}
CvPoint p0 = cvPoint(
cvRound( featuresPrev[i].x ),
cvRound( featuresPrev[i].y )
);
CvPoint p1 = cvPoint(
cvRound( featuresCurr[i].x ),
cvRound( featuresCurr[i].y )
);
cvLine(imgDisplay2, p0, p1, CV_RGB(255,0,0), 2 );
}
cvNamedWindow("goodFeatureToTrack", 0 );
cvShowImage("goodFeatureToTrack",imgDisplay);
cvNamedWindow("FindCornerSubPix", 0 );
cvShowImage("FindCornerSubPix",imgDisplay1);
cvNamedWindow("CalcOpticalFlowPyrLK", 0 );
cvShowImage("CalcOpticalFlowPyrLK",imgDisplay2);
cvWaitKey(5);
}
cvWaitKey(0);
return 0;
} goodFeatureToTrack效果图

FindCornerSubPix效果图

CalcOpticalFlowPyrLK效果图
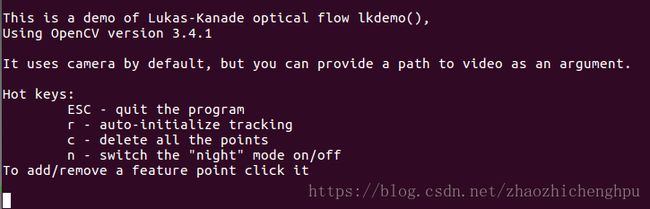
官方有一个LKdemo效果一致,挺有趣的
运行时会有帮助信息,按键ESC退出程序,按键r自动初始化特征点,按键c删除所有点,按键n切换到夜间模式
初始化特征点效果
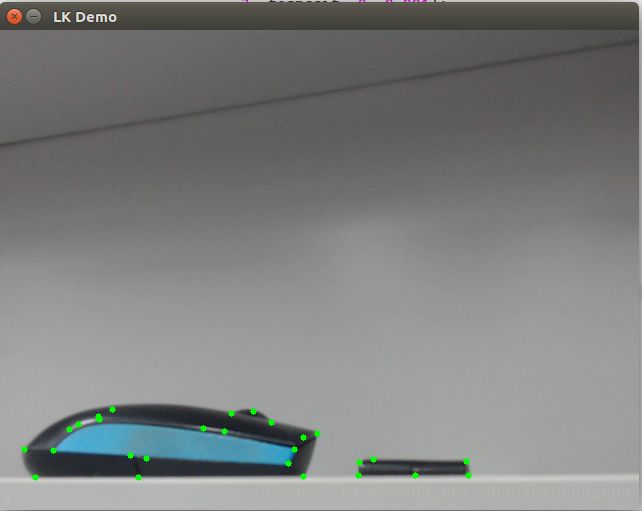
夜间模式

官方链接LKdemo
#include "opencv2/video/tracking.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/videoio.hpp"
#include "opencv2/highgui.hpp"
#include 参考链接:
https://blog.csdn.net/leixiaohua1020/article/details/15029187
https://blog.csdn.net/on2way/article/details/48954159
https://github.com/opencv/opencv/blob/master/samples/cpp/lkdemo.cpp
https://docs.opencv.org/2.4.13/index.html
https://blog.csdn.net/crzy_sparrow/article/details/7407604