算法学习----day01如何确定一个点在多面体内
博主一直从事视频图像处理相关工作,由于一些不可抗力因素,必须马上立刻对一些 computer algorithms 有深入的了解,退后,我要开始学习了。
Today‘s subject:How to check if a given point lies inside a polygon 中文叫如何确定一个给定的点在多面体内。
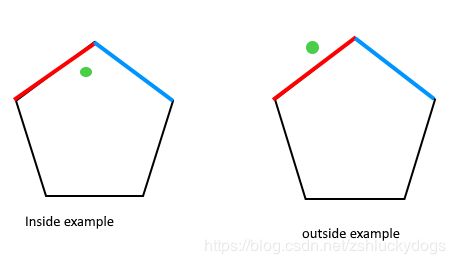
如上图,左边的绿色的点在多面体中,右边的点在多面体外部。具体如何判断呢,简单的说我们可以从绿点 P 发出一条射线,然后统计与多边形的边的交点,如果是奇数则 P (不考虑和多边形顶点共线)则一定是 inside,否则是 outside。见图如下:
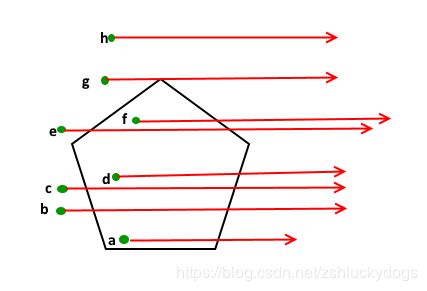
先不考虑 g 点的情况,显然如果点 P 在多面体内则与边的交点一定是奇数,否则就是 outside。显而易见的是 g 点也是奇数个交点1,但是 g 在 外部。不用慌,我们接着往下做,判读交点数目奇偶性之后,考虑共线的情况,如果点 P 与多边形当前直线的顶点共线,判断 P 是否位于多边形的当前边,Yes 返回 inside ,No 返回 outside。
这又产生了新的问题:(1)在共线的前提下如何判断一个点是否在线段上(2)如何判断线段相交。
先解决第一个问题,已知三点P,Q,R 共线,如何判断 Q 在线段 PR 上,显然如果 Q 在 PR 上的话,一定满足下面的不等式:
Q.x <= max(P.x, R.x) && Q.x >= min(P.x, R.x) && Q.y <= max(P.y, R.y) && Q.y >= min(P.y, R.y)接着解决第二个问题,有两种情形,见图如下:
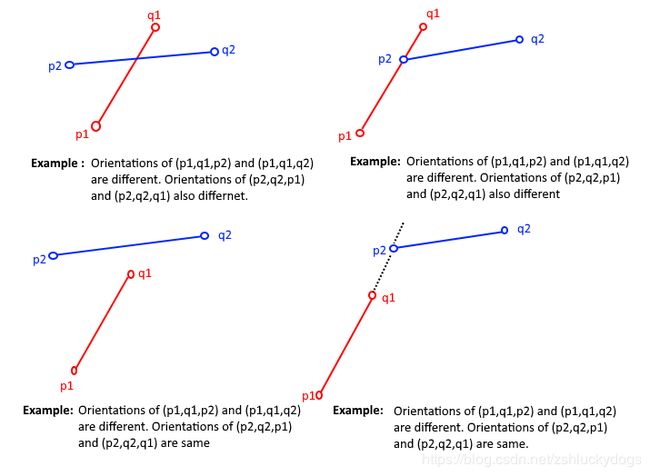
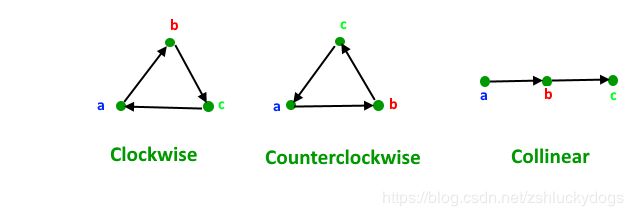
补充概念 Orientations ,对于三元点组(p,q,r)共有三种 orientations,共线、顺时针、逆时针。
假设两条两条线段的顶点分别为 p1,q1,p2,q2,令
o1 = orientations(p1,q1,p2)
o2 = orientations(p1,q1,q2)
o3 = orientations(p2,q2,p1)
o4 = orientations(p2,q2,p2)
第一种情形: o1 != o2 && o3 != o4 两条线段一定相交
第二种情形: p1,q1,p2 共线,并且p2在线段 p1q1 上,相交
第三种情形: p1,q1,q2 共线,并且q2在线段 p1q1 上,相交
第四种情形: p2,q2,p1 共线,并且p1在线段 p2q2 上,相交
第五种情形: p2,q2,p2 共线,并且p2在线段 p2q2 上,相交
else 不相交。
Orientation 计算方法:
p,q,r 三点
val = (q.x - p.y) * (r.x -q.x) - (q.x - p.x) * (r.y - q.y)
val == 0 共线
val > 0 顺时针方向
val < 0 逆时针方向之后就是实现过程了,给出简单的描述:
step1:输入多边形的顶点,顶点数必须大于等于4,输入点 P,交点数目 count := 0;
step2: 从点 P 引一条射线 P->extreme,当前多边形的边 polygon[i]->polygon[next]
next := (i+1)%n;
if P->extreme 与 polygon[i]->polygon[next] 相交;
if P、polygon[i]、polygon[next] 的oreintatons := 0,即共线;
if P 在边 polygon[i]->polygon[next] 上;
return inside
end if
count ++;
i = next;
step3:while i != 0,do step2;
step4:if count%2 ==1,return inside.
Bingo!
给出 C++实现的代码:
#include
using namespace std;
#define INF 10000
struct Point
{
int x;
int y;
};
bool onSegment(Point p, Point q, Point r)
{
if (q.x <= max(p.x, r.x) && q.x >= min(p.x, r.x) && q.y <= max(p.y, r.y) && q.y >= min(p.y, r.y))
return true;
return false ;
}
int orientation(Point p, Point q, Point r)
{
int val = (q.y - p.y) * (r.x - q.x) - (q.x - p.x) * (r.y - q.y);
if (val == 0) return 0;
return (val >0)? 1: 2;
}
bool doIntersect(Point p1, Point q1, Point p2, Point q2)
{
// Find the four orientations needed for general and
// special cases
int o1 = orientation(p1, q1, p2);
int o2 = orientation(p1, q1, q2);
int o3 = orientation(p2, q2, p1);
int o4 = orientation(p2, q2, q1);
// General case
if (o1 != o2 && o3 != o4)
return true;
// Special Cases
// p1, q1 and p2 are colinear and p2 lies on segment p1q1
if (o1 == 0 && onSegment(p1, p2, q1)) return true;
// p1, q1 and q2 are colinear and q2 lies on segment p1q1
if (o2 == 0 && onSegment(p1, q2, q1)) return true;
// p2, q2 and p1 are colinear and p1 lies on segment p2q2
if (o3 == 0 && onSegment(p2, p1, q2)) return true;
// p2, q2 and q1 are colinear and q1 lies on segment p2q2
if (o4 == 0 && onSegment(p2, q1, q2)) return true;
return false; // Doesn't fall in any of the above cases
}
bool isInside(Point polygon[], int n, Point p)
{
// There must be at least 3 vertices in polygon[]
if (n < 3) return false;
// Create a point for line segment from p to infinite
Point extreme = {INF, p.y};
// Count intersections of the above line with sides of polygon
int count = 0, i = 0;
do
{
int next = (i+1)%n;
// Check if the line segment from 'p' to 'extreme' intersects
// with the line segment from 'polygon[i]' to 'polygon[next]'
if (doIntersect(polygon[i], polygon[next], p, extreme))
{
// If the point 'p' is colinear with line segment 'i-next',
// then check if it lies on segment. If it lies, return true,
// otherwise false
if (orientation(polygon[i], p, polygon[next]) == 0)
return onSegment(polygon[i], p, polygon[next]);
count++;
}
i = next;
} while (i != 0);
// Return true if count is odd, false otherwise
return count&1; // Same as (count%2 == 1)
}
int main()
{
Point polygon1[] = {{0, 0}, {10, 0}, {10, 10},{5,15}, {0, 10}};
int n = sizeof(polygon1)/sizeof(polygon1[0]);
Point p = {5, 5};
isInside(polygon1, n, p)? cout << "Yes \n": cout << "No \n";
/* Point p = {5, 5};
isInside(polygon1, n, p)? cout << "Yes \n": cout << "No \n";
Point polygon2[] = {{0, 0}, {5, 5}, {5, 0}};
Point p = {3, 3};
n = sizeof(polygon2)/sizeof(polygon2[0]);
isInside(polygon2, n, p)? cout << "Yes \n": cout << "No \n";
Point p = {5, 1};
isInside(polygon2, n, p)? cout << "Yes \n": cout << "No \n";
Point p = {8, 1};
isInside(polygon2, n, p)? cout << "Yes \n": cout << "No \n";
Point polygon3[] = {{0, 0}, {10, 0}, {10, 10}, {0, 10}};
Point p = {-1,10};
n = sizeof(polygon3)/sizeof(polygon3[0]);
isInside(polygon3, n, p)? cout << "Yes \n": cout << "No \n"; */
return 0;
}