分布孔径红外探测系统研究综述
声明
1)本文仅供学术交流,非商用。具体引用的资料请看参考文献。如果某部分不小心侵犯了大家的利益,请联系博主删除。
2)本人才疏学浅,整理总结的时候难免出错,还望各位前辈不吝指正,谢谢。
联系方式:[email protected]
分布孔径红外探测系统研究综述
1分布孔径红外系统研究意义
随着科学技术的不断发展,包括精确制导武器在内的各种高科技装备得到前所未有的发展,同时也面临不断变化的挑战。为了提高精确制导武器的命中率,获得更高的探测性能,并且能够对多个目标同时攻击,探测手段应向多波段、分布式多探测器复合的方向发展。分布式孔径探测系统由多个探测器协同工作,同时对多个目标进行检测、识别、跟踪,然后再各自对其中若干个威胁较大的目标进行攻击,大大降低了目标检测、识别和跟踪的难度,同时又提高了精确制导武器的命中精度。因此,分布式孔径探测算法正成为当前国内外目标检测、识别和跟踪领域的研究热点[1]。随着光电技术的不断成熟,第三代焦平面阵列的出现,以及日益强大的信号处理算法为军事和非军事应用光电传感器系统设计提供了一个新的方向。基于这些进展,分布式孔径红外探测系统(DAIRS)在各种各样的战术情况下发挥了越来越多的重要性,为导弹威胁预警、红外搜索和跟踪、战斗损害评估、目标援助和领航提供了重要的信息;同时,在水面舰船、装甲车辆和无人空中战斗车辆等领域也有了新的应用[2]。由于分布孔径红外系统在现代军事当中的重要性,论文[3-4]系统介绍了DAIRS发展历史、主要功能和关键技术,以及实际应用的例子和未来使用DAIRS的前景。在[5]中,研究者采用头盔显示器相结合的分布式孔径光电系统如图1,使飞行员能够在任何方向查看机身,以便在空战或低空航行时提高态势感知能力。诺斯洛普公司采用六个传感器,360°红外分

图1分布孔径系统使用的综合头盔显示器[5]
布式孔径系统在F-35联合攻击战斗机上进入飞行测试,以便提供导弹探测、红外搜索和跟踪、导航模式。同时,试飞了一架安装有红外分布式孔径系统的直升机旨在帮助直升机飞行员在低水平的安全飞行,包括敌方火力指示,登陆援助和红外搜索与跟踪能力。诺斯洛普将DAIRS系统作为在F-35上一个导弹探测和跟踪系统,但随着红外成像传感器的增长能力,该系统的目的是检测表面对空导弹以推出精确的发射地点和预测目标飞机。文献[6-9]等也设计了分布式孔径光电系统,虽然他们采用的并不是红外传感器,但再原理上与分布孔径红外探测系统有着类似的功能。

图2美国先进战斗机F -22 上"彗星"拖曳式红外诱饵[5]
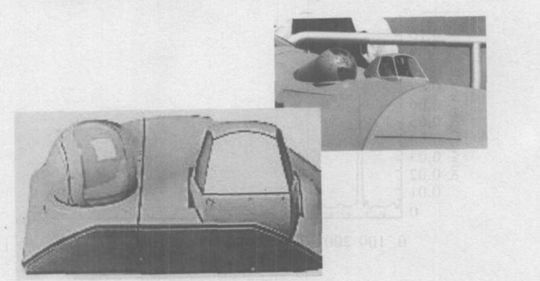
图3法国" 阵风" 战斗机的" 前扇区光学系统"[5]
整体而言,分布孔径红外系统已经在现代的武器系统中扮演者越来越重要的角色,如果从应用的角度而言,分布孔径红外系统已经在海军、空军和陆军都有广泛的应用前景;同时分布孔径红外系统又是一个涉及光、机、电、热的复杂系统。基于此,本文将从应用和系统两大方面对分布孔径红外系统的研究现状做介绍,而应用分为海军、空军、陆军三个方面;系统综述分为光学设计和图像处理两大方面,图像处理由分为图像融合拼接,和目标的检测跟踪几个方面。
2基于不同应用场景的研究
2.1空军上的应用
新一代战斗机具有超音速巡航能力、超视距作战能力以及较为突出的隐身性能.它的机动性强, 采用了综合航空电子系统, 适宜多种战术用途.在现代战争中, 先进战斗机已成为夺取制空权赢得胜利的至关重要条件,这不仅仅依靠其飞行性能和机载武器,同时与其航空电子系统, 如各种雷达、光电探测预警系统、导航系统、通信系统、光电对抗系统等密切相关。分布式孔径红外系统是诺斯罗普·格鲁曼公司于20 世纪90年代初期开始研制DAIRS,以实现连续的高分辨率全空间覆盖,其多种功能包括导弹逼近告警、红外搜索与跟踪(IRST)、下视红外型目标瞄准指示、杀伤效果评定及导航[10]。文献[11-13]等先后对先进战斗机光电传感器综合系统做了综述。整体而言,美国先进战斗机F-22和F-35上采用的光电对抗技术主要包括三个方面:①新型面源红外诱饵技术,②战术飞机定向红外对抗(TADIRCM)技术,③光电隐身技术。俄罗斯战斗机的光电传感器综合系统包括激光测距机和红外搜索与跟踪系统,是在OEPS(光电瞄准系统)的基础上改进而来.激光测距机与红外搜索跟踪系统的光学系统采用共轴光路,使系统结构紧凑,并能保证激光测距时激光光束稳定照射目标.激光测距机的最大测距距离为0.2~6 km。系统的红外器件为工作在3~5μm的64元InSb大光敏面元器件, 既可保证系统具有较大的瞬时视场, 又可省略平台的稳定系统。在近距格斗中, 激光测距机和红外搜索跟踪系统协同工作,准确确定目标方位.该系统性能优于普通的侦察吊舱。此外,机身还装有导弹告警装置,全部探测信息显示在驾驶舱内的先进头盔瞄准具上。欧洲四国(英国、德国、意大利和西班牙)研制的欧洲战斗机/"台风"和法国研制的"阵风"战斗机是欧洲先进战斗机的典型代表,前者采用了"防御辅助子系统(DASS)",后者采用了"多频谱自保护系统(SPECTRA)"。防御辅助子系统(DASS)是一种综合电子战系统,包括一套由中心计算机集成的检测和防御装置,由雷达告警接收机、ECM 系统、拖曳式诱饵、CFDS系统、激光告警系统和导弹逼近告警系统组成.它与欧洲战斗机/"台风"航空电子系统集成在一起,具有威胁告警、态势感知和干扰能力,可对付包括雷达、红外、激光在内的全频谱
威胁。
而几年,国内的技术也在迅速发展,众多研究[14-20]都开展了基于分布孔径红外检测跟踪算法。其中最具代表性的是文献[14]分析了天基红外传感器弹道导弹中段目标识别技术,其中目标温度、平均温度变化率、谱分布、姿态运动和辐射方向图等特征是影响目标是被的主要因素。
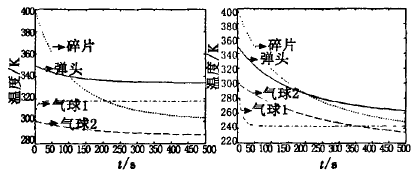
图4 日照和无日照条件下的中段目标温度变化图[14]
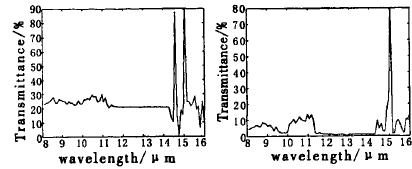
图5种不同材料目标的红外辐射光谱分布示意图[14]

图4不同姿态运动目标的辐射[14]
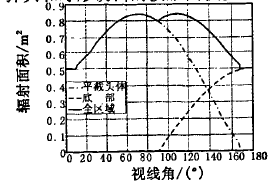
图6锥形弹头类目标投影面积随观测角的变化特性[14]
同时指出,为了提高中制导和末制导精度,应根据制导目的和制导指标选取合适的导引律。影响导弹探测发现目标及截获目标能力的主要因素是载机雷达的性能及导引头抗干扰的能力,也就是说,为了提升导弹的制导能力,应改进载机雷达性能和导引头性能,并选取最优导引律以提高制导精度。
2.2海军上的应用
海军面临着一个不断发展的威胁场景,从亚音速巡航巡航导弹到诸如科尔号所经历的新的、非常规的威胁。下一代海军技术发展计划正在开发一种"隐身"船,通过减少船只的雷达横截面和控制电磁发射。为了满足不断变化的网络环境威胁的挑战,美国已经启动了"宽中波红外阵列"计划。在该计划的支持下,雷神视觉系统(RVS)正在利用分子束外延生长碲镉汞硅探测器技术开发一个2560 x512元焦平面阵列。同时将阵列封装在一个密封的杜瓦瓶。由此产生的子系统将是多相机分布式孔径态势感知传感器的一个组成部分,它将提供对地平线的连续监视。文献[21]报到了对中波碲镉汞分子束外延在探测器阵列的制备硅材料。与读出电路相比,碲镉汞探测器阵列没有热膨胀失配现象,因此大面积焦平面阵列(FPAs)可靠的在没有 热循环可的情况下。此外,这些设备不需要依靠细化或网状InSb FPAs来实现高水平的导弹预警传感器要求。HgCdTe/Si晶片还可以扩展到比HgCdTe/CdZnTe晶片更大的尺寸。目前正在生产四英寸直径的碲镉汞硅片,比标准的1.7英寸x 2.6英寸碲镉汞/碲化镉晶片大得多。
国内也正在做相关的研究,如西北工业大学航天学院的张科团队就做了相关的研究,在文献[22]中就提出了分布式海面红外攻防对抗仿真系统。针对红外导弹与舰船攻防对抗计算机仿真问题,基于高层体系结构协议,利用MAK仿真平台实现了海面红外攻防对抗仿真系统。该系统实现了战斗机携带红外导弹攻击舰船和舰船红外干扰的释放,从而评价海面战场中红外导弹和各种干扰对抗的性能。详细论证了该仿真平台的结构,设计了导弹、舰船、干扰弹和烟雾实体结构及模型,并在该平台的基础上对导弹的性能和干扰措施性能进行了仿真分析。在该仿真平台下实现了对该武器系统的结构、气动、导航、控制、作战效能、舰船的红外特征、干扰策略的初步设计和仿真,并且用VR-Forces 完成了兵力生成,验证了仿真实体模型的合理性,图6是系统中舰船发射干扰弹仿真图。其它还有文献[23-26]等也从不同的角度做了针对于海军的红外孔径分布。
图7舰船发射干扰弹仿真图[22]
2.3陆军上的的应用
分布孔径红外系统(DAIRS)是军事力量的红外搜索与跟踪系统的发展趋势。其中探测范围是最重要的一个指标,它是由系统参数决定的文献[27]建立了地面式探测范围的数学模型,并对目标定位,探测器积分时间和瞬时视场(IFOV)对传统的扫描式红外成像系统的操作范围进行分析。而文献[28]是一个类似的专利。
国内的朱斌、樊祥等人也进行了地基分布孔径红外系统的作用距离模型研究,针对DAIRS的成像与信息处理特点,对系统的作用距离进行了研究,建立了DAIRS作用距离模型,分析了目标方位、探测器积分时间和瞬时视场等因素对DAIRS与传统扫描型系统作用距离的影响,结果表明目标方位角对扫描型系统没有影响,而对 DAIRS 却有着直接影响。
3分布孔径红外系统的关键技术及研究进展
一个完整的分布孔径红外系统应该包括光学系统、传感器系统和后端处理系统。但是正真做分布空间红外系统的研究者很少从红外传感器开始设计,而是利用现有的红外传感器,再基于应用的需求设计光学系统和后端处理系统。本文是对系统级的研究总调研,所以对传感器的研究不在赘述,后文将会对光学设计和后端处理两个方面分别介绍。
3.1光学设计
光学设计是成像系统的最前端部分会直接影响图像的质量。分布孔径红外系统的传统红外光学设计会面临传统的光学设计问题和分布孔径红外系统特有的光学设计问题。传统的光学系统问题有:①红外变焦系统短焦部分冷反射严重;②红外探测器焦平面阵列存在占空比导致系统光能损失的影响等。针对问题①,文献[30]提出了一种双孔径设计方法,设计了一种双孔径红外变焦光学系统。系统工作波段为中波3.7~4.8μm,焦距为30/150/300 mm,10×变倍比,具有100%冷光阑效率。对双孔径系统的短焦部分和单孔径系统短焦部分的冷反射强度进行了对比分析,双孔径系统的冷反射得到有效控制。双孔径红外变焦光学系统具有像质好、变倍比大、短焦冷反射小、结构紧凑的特点,可使大变倍比的红外变焦光学系统在红外成像系统中得到广泛应用。针对问题②,文献[31]设计并制作了一种100%占空比、球面矢高8μm、周期50μm的红外石英方形孔径球面微透镜阵列。应用非序列光学分析方法模拟并分析了微透镜周期结构占空比对光能利用率的影响。运用移动掩膜曝光技术和反应离子刻蚀技术制备微透镜阵列,通过显微镜和白光干涉仪对微透镜表面形貌进行表征,并分析了其面形误差。根据实验结果判断射频功率、工作气压及刻蚀气体流量工艺参数对微透镜形貌具有很大影响,经过分析确定了最佳工艺参数组合。测试结果表明:在最佳工艺参数组合条件下制作的微透镜占空比基本达到100%,红外焦平面光能效率从原来的65%提升到93%以上,说明方形孔径球面微透镜能够代替传统圆形孔径微透镜获得更高的光能利用率。
分布孔径红外系统特有的光学设计问题主要是全景图像的光学设计问题。其中为了改变坦克现有探测与观瞄系统低效、精确性不足等弱点,文献[32]进行基于孔径分布概念的全景系统光学设计。原理是利用4个孔径大于90°的物镜对360°全景图像信息进行孔径分布实时采集,采集的四路图像通过内部转像系统的折转汇成一路,由一个CCD 接收,提供准确和平整的全景图拼贴的图像,对系统理想情况下的发现和分清目标距离以及盲区范围进行估算,并通过光线追迹估算出系统失效探测距离。系统在 57m~6.45km的工作距离内,实现全方位、实时性的观瞄与探测功能。其它还有文献[33]公开了一种热红外波段的分孔径偏振成像光学系统;文献[34]研究了大视场大相对孔径长波红外机械无热化光学系统的设计;文献[35]分析了非制冷热成像器,利用全方位全景光学性能,重点范围性能。这些研究也为分布孔径红外系统特有的光学设计提供了一些参考。
3.3图像重建技术
分布孔径红外系统的后端主要包括两个方面,一个是基于分布孔径红外传感系统实现图像的融合和拼接,得到全景红外图像;解释是基于全景图像实现目标的检测跟踪,下面对这两方面的研究进展分别做介绍。
3.3.1图像融合和拼接
分布孔径红外探测系统的后端图像处理由很多工作如图像增强、超分辨率成像等[36],但是对于多个探测器组成的系统,图像融合和拼接是分布孔径红外探测系统的最重要的研究内容,目前已经有多个研究小组做了相关的研究。其中图像拼接主要是为了通过多个探测器红的全景图像,图像融合主要是为了实现雷达/红外的信息融合。下面介绍几个典型的研究,其中文献[37-39]主要介绍了分布孔径红外探测系统的的融合问题,文献[40-41]介绍了分布孔径红外探测系统的的拼接问题。
为了提高雷达/红外复合制导精度,针对雷达/红外复合制导信息融合中量测模型非线性问题,文献[37]提出一种基于不敏卡尔曼滤波器(UKF)的分布式雷达红外加权融合算法。该算法在解决量测模型非线性函数问题上,不是对非线性函数进行近似,而是对非线性函数的概率密度分布进行近似,因而避免了扩展卡尔曼滤波的模型线性化误差导致滤波发散的问题。仿真结果表明,该算法收敛性好,融合精度高,鲁棒性好,实时性好,可以满足复合制导中信息融合技术的要求。文献[38]在雷达/红外复合制导机动目标跟踪背景下,针对非线性机动目标融合跟踪存在滤波器易发散问题,提出一种基于交互式多模型无迹卡尔曼滤波(IMM-UKF)的分布式加权融合算法。IMM具有对不同目标机动模式自适应跟踪的能力;UKF对观测数据进行滤波估计,避免了计算雅克比矩阵,克服EKF滤波方法受滤波初值影响大、易发散的缺点;分布式融合算法提高了系统抗干扰能力及对目标跟踪的有效性和跟踪精度。仿真结果表明:该算法在处理非线性系统机动目标跟踪融合结果误差均得到减少,更能提高目标跟踪滤波精度,增强了系统稳定性。文献[39]提出了一种多传感器跟踪关联的高精度估计融合方法。在分析状态融合和测量融合方法的基础上,比较了两种方法的估计效果。考虑到测量协方差对融合结果的影响,将测量协方差矩阵的元素分配给不同传感器的测量值作为权重,并结合加权测量形成卡尔曼滤波中的新度量。仿真结果表明,新方法的估计精度远远高于状态和测量融合方法。
文献[40]研究了平面子孔径拼接算法,基于最大似然估计与正交化Zernike多项式拟合建立了一套合理的拼接算法与数学模型,基于该算法模型可以有效实现对大口径平面镜的拼接检测,同时编写了相应的拼接程序,并利用Φ100 mm干涉仪对Φ120 mm的平面镜进行了拼接检测,给出了拼接检测与全口径检测的对比结果,对比结果表明:拼接所得全孔径相位分布与全口径检测结果的RMS值偏差分别为0.002λ,验证了算法的可靠性与准确性。
为实现微球形貌检测中子孔径数据的快速、准确拼接,文献[41]给出基于点衍射干涉原理的微球形貌检测模型,分析了干涉场横向分辨率的分布规律,提出基于映射图像匹配的子孔径拼接方法。通过形貌数据的等尺度变换,实现横向分辨率均匀化,并将三维点云数据进行降维处理,映射生成二维图像,从而将形貌数据的旋转关系转化为图像坐标的平移关系,再通过图像匹配算法对特征点进行匹配,得出子孔径坐标系间的对应关系,从而实现拼接。最后通过仿真实验验证了该方法的可行性和有效性。
针对雷达/红外复合制导信息融合中量测模型非线性问题,文献[53]提出一种基于不敏卡尔曼滤波器(UKF)的分布式雷达红外加权融合算法。该算法在解决量测模型非线性函数问题上,不是对非线性函数进行近似,而是对非线性函数的概率密度分布进行近似,因而避免了扩展卡尔曼滤波(UKF)的模型线性化误差导致滤波发散的问题。图8是雷达/红外导引头分布式融合系统结构。结果表明基于UKF跟踪滤波的雷达/红外航迹加权融合的算法。仿真结果表明:①该算法在处理非线性观测系统时可有效避免滤波发散,有较好的融合精度②融合后的目标定位比单独的分布孔径红外系统和雷达都有更高的精度。图9和图10展示了融合后和融合前的方位角和X轴的精度。
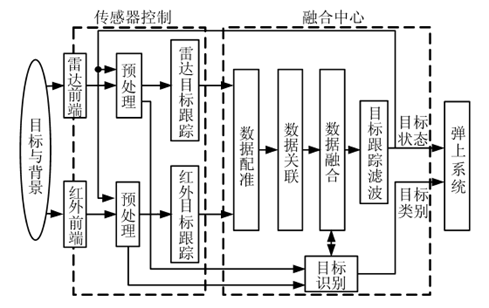
图8雷达/红外导引头分布式融合系统结构[41]

图9方位角均方根误差[41]
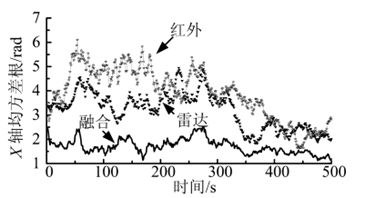
图10 X 轴均方根误差[41]
3.3.1检测跟踪
基于分布孔径红外探测系统的检测系统主要涉及目标的识别、目标的航迹关联几个问题。其中的每一个环节都已经有大量的沿着在研究。针对与目标检测和识别问题,飞利浦实验室首先提出了"环境智能"的设想:到2020年,人们将生活在一个由相互连接着的、智能的、广泛分布的、可响应的电子设备和服务组成的世界中,并以一种更自然、舒适的方式与这些电子设备相处。这些智能电子设备形成一个友好的数字化环境,它可以感受到人们的需求,预测人们的行为并对他们的存在作出响应,从而有效地提高人们的生活质量。并基于飞利浦东亚实验室与上海交通大学的一个名为"传感器与环境智能"的合作项目开发了人体行为识别系统,该项目主要研究无线传感器网络中的数据处理、数据融合和行为识别算法。到目前位置,这套系统的软硬件已经基本建立。传感器节点(Berkley Motes)将采集到的经过校正的传感器数据通过无线信号和串口发送到PC机,经过一些预处理步骤后,提取特征,然后进行建模或识别。一个动作被分成几个线索,每一个线索的识别需要一个统计模型。最后融合这些线索来识别出动作的类型。现在这套系统可以识别的动作有:顾客进入休息区、坐在沙发上、去书架上取书等等。 本文首先简要介绍了无线传感器网络的结构、特点和应用,然后详细介绍了人体识别系统的结构、识别算法和识别结果。基于这个项目,文献[42]提出了:(1)一个新颖的室内人体定位方法。其优点是优点是:①无需增加任何额外设备;②人身上无需佩戴传感器;③容易布置、配置和实现;④受环境干扰小。(2)将Voronoi图应用到"基于无线传感器网络的人体行为识别系统"中,通过由商店场景图生成的Voronoi图的来进行红外传感器节点的优化配置,并且对于不同位置的节点传出的信息设置不同的权值,便于优化定位追踪的算法。而文献[43-44]等对分布式多目标跟踪系统的航迹关联问题做了研究,其中文献[43]提出了基于灰色理论提出了一种新的航迹关联算法,该算法根据数据列因素之间发展态势的相似或相异程度来衡量航迹间接近的程度,使航迹关联问题突破了样本容量和典型分布这两条限制。文献[44]提出了一种用于综合评估导弹攻击系统的改进灰色关联投影法。用[-1,1]线性变换算子和分辨系数建立了灰色关联度判断矩阵,通过熵权系数法和模糊互补判断矩阵排序算法组合赋权确定权重,给出了改进的灰色关联投影模型。而考虑到未来的高技术战场,必将是各种精确制导武器相互角逐的战场。而分布式探测系统是由多个探测器协同工作,同时对多个目标进行检测、跟踪、关联,然后对各自视场中威胁较大的目标进行攻击,以提高了精确制导武器的拦截概率。文献[45]针对单探测器条件下的小目标检测问题,提出了一种基于量测—航迹关联的小目标检测算法,依据目标运动的连续性,并采用最小线性二乘估计目标位置状态,提高轨迹关联的稳定性,从而提高了目标检测概率。同时考虑到在分布式多探测器统一视场建立方面,由于缺乏目标的距离信息,无法在三维坐标系上进行转换。文献[45]还提出了基于目标成像模型与坐标系旋转变换模型,完成不同平台探测器视场统一的建模。为了保证信息处理的实时性,设计了基于CORDIC算法的坐标转换的硬件加速电路,通过仿真验证了设计的正确。针对点状及斑点状目标可利用的灰度及形状信息不足,难以实现目标对应的问题,本文提出了一种基于灰色理论的航迹关联算法,有效利用了目标的各个状态信息来实现目标间的对应。仿真实验表明在目标较为密集且存在交叉运动情况下,算法具有较高的正确关联率和良好的鲁棒性。以上的方法主要是从模型的角度出发,针对周视红外搜索系统对目标的搜索定位问题,文献[46]提出了一种新的目标定位模型,推导了定位误差公式。在建立这种目标定位模型的推导过程中,分析了影响目标搜索定位的主要因素,如搜索站站址误差,各站对目标定位的方位角误差、俯仰角误差以及目标距离等。采用矩阵分析并利用提高数据冗余的方法推导了目标的三维坐标及相对各搜索基地的距离值的表达式,由此加快了计算目标定位误差的处理速度。
在分布孔径红外系统中面临着多目标跟踪的问题,而在这个过程需要面对以下结果问题:①目标数目随时间变化②目标出现时间与位置难以预知③虚警干扰严重④传统多目标跟踪方法存在组合爆炸问题。基于此文献提出了一种天基红外系统多目标快速跟踪方法,该方法通过高斯混合概率假设密度滤波器避免了复杂的数据关联运算,反馈滤波方法解决GM-PHD 滤波器新目标丢失问题。图11是算法的实现过程,图12是通过GM-PHD反馈滤波算法与其它算法在多目标检测过程中的一个比较,结果表明该算法在多目标检测当中有一定的优势。
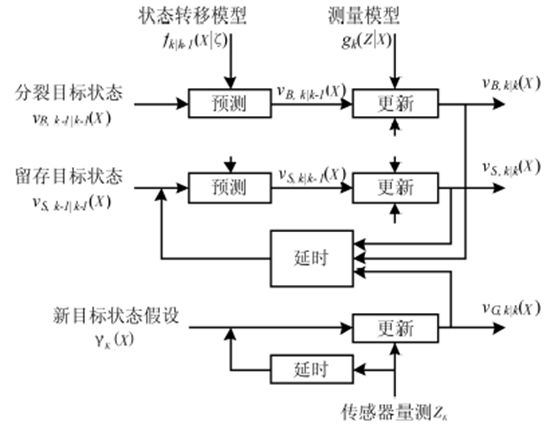
图11 GM-PHD 反馈滤波器目标状态更新示意图[46]

图12不同算法对目标数目的估计结果[46]
其它的研究者如文献[47-48]也对分布孔径红外探测系统的定位问题提出了一些方法,但整体而言,分布孔径红外探测系统的检测跟踪算法善为成熟,还需要不断的完善。
4分布孔径红外系统研究中存在的困难和发展趋势
整体而言,随着光电技术的发展,分布孔径红外系统研究也得到了质的提升。但其优缺点和难点也逐渐凸显出来。考虑到其特点,目前一些研究者已经开始了红外和雷达的综合应用如[49-52],下面对分布孔径红外系统优缺点和发展趋势做简单的概况,以便其他的研究者参考:
优点
①隐蔽和电磁静默式的工作方式;
②分辨率较高, 通常情况下在高度和方位上都为1m rad;
③红外波谱可避免雷达在海面或接近海面的区域所产生的多路径效应。
④提供了无缝的、综合的宽视野空情图像;
⑤具有体积小,无需陀螺机构,相比机械扫描系统可以节省 的重量与成本,而且可以与其它桅杆安装系统共存;
缺点或者难点:
①适合于分布孔径红外系统的全景式光学系统设计;
②运动中的多传感图像全景拼接和检测跟踪技术复杂;
③与雷达相比,有更多的细节信息,但是探测距离有限。
发展趋势:
①发展多波段、多光谱技术,提高杂波抑制能力与目标识别能力;
②发展高帧频技术,提高系统灵敏度与响应速度;
③发展超分辨率技术(微扫描技术)解决大视场与高分辨率的矛盾。
④与雷达结合的红外雷达综合检测系统
参考文献:
[1]分布式孔径探测技术研究[D]. 国防科学技术大学, 2008.
[2]Brusgard T C. Distributed-aperture infrared sensor systems[J]. Proceedings of SPIE - The International Society for Optical Engineering, 1999, 3698:58-66.
[3]Lan T, Nan-Yan L U. Application and development of electro-optical distributed aperture system[J]. Infrared & Laser Engineering, 2007.
[4]Fan J, Jin W U. The Sate of the Art and Future Vision of the Distributed-Aperture Infrared Sensor System[J]. Modern Defence Technology, 2000.
[5]Wider applications seen for distributed-aperture infrared sensors
[6]Peng X, Bennamoun M, Wang Q, et al. A Low-Cost Implementation of a 360° Vision Distributed Aperture System[J]. IEEE Transactions on Circuits & Systems for Video Technology, 2015, 25(2):225-238.
[7]Peng X, Wang Q. A Personal Computer Based 360 Degree Vision Distributed Aperture System[C]// Seventh International Conference on Image and Graphics. IEEE Computer Society, 2013:579-584.
[8]Hawkins G S. METHOD AND SYSTEM FOR CREATING A DISPLAY WITH A DISTRIBUTED APERTURE SYSTEM:, US20170085791[P]. 2017.
[9]Wilson J P, Schuetz C A, Martin R, et al. Polarization sensitive millimeter-wave imaging sensor based on optical up-conversion scaled to a distributed aperture[C]// International Conference on Infrared, Millimeter, and Terahertz Waves. IEEE, 2012:1-1.
[10]余巍, 赵勇. 美空军分布式综合电子战系统探析[J]. 外军电子战, 2003(1):15-17.
[11]王浩, 刘敬民, 张洁,等. 先进战斗机光电传感器综合系统及其光电对抗技术[J]. 光电技术应用, 2005, 20(5):67-72.
[12]刘敬民, 王浩, 张洁. 先进战斗机光电综合系统发展综述[J]. 光电技术应用, 2007, 22(6):4-6.
[13]刘志春, 袁文, 苏震,等. 国外先进战斗机的光电自卫系统[J]. 激光与红外, 2009, 39(1):3-7.
[14]刘涛, 陈浩文, 黎湘. 天基红外传感器弹道导弹中段目标识别技术分析[J]. 电光与控制, 2009, 16(3):6-8.
[15]陈云. 天基红外预警系统轨迹关联与跟踪关键技术研究[D]. 国防科学技术大学, 2010.
[16]林再平.天基红外图像弱目标检测前跟踪技术研究[D]. 国防科学技术大学, 2012.
[17]廖微, 戴健, 彭向军. 天基红外系统多目标快速跟踪方法[J]. 电子设计工程, 2014(23):1-3.
[18]Zhang Y. Application and development of integrated airborne electro-optic systems[J]. Sensor World, 2014.
[19]天基红外相机大气背景测量数据处理与图像仿真技术研究[D]. 哈尔滨工业大学, 2016.
[20]李道京, 杜剑波, 马萌,等. 天基合成孔径激光雷达系统分析[J]. 红外与激光工程, 2016, 45(11):262-269.
[21]Gulbransen D J, Black S H, Childs A C, et al. Wide-FOV FPAs for a shipboard distributed aperture system[C]// Defense and Security. International Society for Optics and Photonics, 2004.
[22]张德明, 张科, 吕梅柏. 分布式海面红外攻防对抗仿真系统[J]. 电光与控制, 2014, 21(3):58-61.
[23]韩根甲. 舰载红外搜索与跟踪系统的最新现状与发展趋势[J]. 现代防御技术, 2007, 35(3):109-113.
[24]孙欣. 舰用红外警戒技术的发展与思考[J]. 光学与光电技术, 2009, 7(4):97-100.
[25]夏明革, 何友, 唐小明,等. 舰载红外警戒系统发展概况及其关键技术评述[J]. 舰船电子工程, 2002(2):8-12.
[26]白学福. 基于舰载红外警戒系统的被动测距技术研究[D]. 国防科学技术大学, 2007.
[27]Zhu B, Fan X, Cheng Z. Mathematical model of operating range for ground-based Distributed Aperture Infrared System[J]. Infrared & Laser Engineering, 2013.
[28]Unsoy A, Aydin M, Lafci A, et al. DISTRIBUTED APERTURE SENSOR CAMERA SYSTEM:, WO/2015/001528[P]. 2015.
[29]朱斌, 樊祥, 程正东.地基分布孔径红外系统的作用距离模型[J]. 红外与激光工程, 2013, 42(11):2871-2875.
[30]赵坤, 李升辉. 双孔径红外变焦光学系统设计[J]. 红外与激光工程, 2013, 42(11):2889-2893.
[31]董亭亭, 陈驰, 付跃刚. 红外探测器100%占空比的方形孔径球面微透镜阵列的研制[J]. 真空科学与技术学报, 2016, 36(9):1042-1047.
[32]吴振宇, 高明. 基于孔径分布概念的全景系统光学设计[J]. 应用光学, 2010, 31(2):174-179.
[33][4] 黄绪杰, 沈为民, 李琪. 热红外分孔径偏振成像光学系统:, CN105588643A[P]. 2016.
[34]吴海清, 田海霞, 崔莉,等. 大视场、大相对孔径长波红外机械无热化光学系统设计[J]. 红外, 2015, 36(8):1-4.
[35]Furxhi O, Driggers R G, Holst G, et al. Performance analysis of panoramic infrared systems[C]// SPIE Defense + Security. 2014:907112.
[36]压缩编码孔径红外成像超分辨重建
[37]谢泽峰, 高宏峰, 任亚飞. 基于UKF的雷达/红外分布式加权融合算法[J]. 导弹与航天运载技术, 2013, 34(3):59-62.
[38]谢泽峰, 高宏峰. 基于IMM-UKF的雷达/红外分布式加权融合算法[J]. 弹箭与制导学报, 2014, 34(3):45-49.
[39]Liu Y K, Fan Y Y, Zhao J, et al. A high estimate accuracy fusion method for multisensor tracking association[C]// Industrial Electronics and Applications, 2009. Iciea 2009. IEEE Conference on. IEEE, 2009:3876-3880.
[40][闫公敬, 张宪忠. 基于最大似然估计算法的子孔径拼接检测技术[J]. 红外与激光工程, 2015, 44(7):2206-2210.
[41]卢丙辉, 陈凤东, 刘炳国,等. 基于映射图像匹配的子孔径拼接技术[J]. 红外与激光工程, 2016, 45(8):141-146.
[42]成雄. 基于分布式红外传感器网络的行为识别定位问题的研究[D]. 上海交通大学, 2007.
[43]衣晓, 关欣, 何友. 分布式多目标跟踪系统的灰色航迹关联模型[J]. 信号处理, 2005, 21(6):653-655.
[44]单鑫, 董文洪, 李勇. 导弹攻击系统综合评估的改进灰色关联投影法[J]. 上海航天, 2007, 24(5):47-50.
[45]分布式探测器红外目标数据关联技术研究[D]. 国防科学技术大学, 2011.
[46]贾庆莲, 乔彦峰, 邓文渊. 多基地周视红外搜索系统的目标定位与精度分析[J]. 光学精密工程, 2009, 17(4):720-726.
[47]樊祥, 朱斌,等. 双分布孔径红外系统的协同定位与精度分析[J]. 激光与红外, 2016, 46(4):434-438.
[48]面向天基预警的红外压缩成像探测跟踪技术研究[D]. 西北工业大学, 2015.
[49]Stubbs D, Duncan A, Pitman J T, et al. Multiple instrument distributed aperture sensor (MIDAS) evolved design concept[C]// SPIE International Symposium on Optical Science and Technology. International Society for Optics and Photonics, 2004:391-398.
[50]朱志宇. 基于红外和雷达数据融合的机动目标跟踪方法[J]. 激光与红外, 2007, 37(2):170-174.
[51]朱志宇. 基于红外和雷达的目标跟踪数据关联快速算法[J]. 光电技术应用, 2007, 22(4):58-63.
[52]倪龙强, 高社生, 孟祥欣,等. 一种红外与雷达信息融合跟踪算法及其性能分析[J]. 火炮发射与控制学报, 2014(4):44-48.
[53]谢泽峰, 高宏峰, 任亚飞. 基于UKF的雷达/红外分布式加权融合算法[J]. 导弹与航天运载技术, 2013, 34(3):59-62.