Ubuntu16.04下用kinect v2实现RTABMAP-ROS建图
Ubuntu16.04下用kinect v2实现RTABMAP-ROS建图
本人最近刚接触到Visual SLAM的知识,作为初学者,看了很久高翔《视觉SLAM十四讲》,理论暂时没有完全搞明白。
近期再尝试使用kinect v2进行RTABMAP建图,网上查找了很多资料,发现对于SLAM大部分的内容都是在ROS下进行,于是我也在其中进行尝试,期间遇到很多问题,现在终于跑通,特来记录,以供我这样的小白日后方便查看。
一、前期准备
1.安装ROS环境:https://blog.csdn.net/jianzhuan2824/article/details/89098865
2.安装kinect v2驱动以及ROS下运行:https://blog.csdn.net/jianzhuan2824/article/details/89242345
二、安装rtabmap-ros包
1.参考文章
官网:http://introlab.github.io/rtabmap/
安装 教程:
github外文参考文章:https://github.com/introlab/rtabmap_ros#installation
网上查找到的自认为最好的一篇安装教程:https://www.ncnynl.com/archives/201709/1991.html
2.安装
安装方法总共分两种, 一种是直接deb安装,一种是源码安装。
源码安装详见上边的例程。本人亲自尝试了下,发现在编译RTABMAP时会出现 /usr/bin/ls 找不到lBoost::timer 的错误,为了解决这个错误,我花费了2个周时间,最后毫无收获。
所以这里不建议大家去折腾源码安装,费力不讨好。
我也尝试在~/catkin_ws/src下复制源码rtabmap_ros,然后到 ~/catkin_ws下进行catkin_make,但是还是编译出错,这种方法也放弃了。
其实,github上说的很明确, rtabmap已经集成到ROS下了,
所以只需要一步,简单粗暴:(注意ROS版本就行)
sudo apt-get install ros-kinetic-rtabmap-ros
三、运行测试
网上好多测试方法去启动深度相机,有直接rtabmap的,但是我总是显示连接不到设备,原因是深度相机那里选择不了kinect v2,所以识别不了。这个问题应该是可以解决的,毕竟选项里明明有kinect v2,只是无法选择,但暂未解决。
欢迎各路大神给予方案建议。
1.参考文章
参考外文:http://wiki.ros.org/rtabmap_ros/Tutorials/HandHeldMapping
CSDN博客:
https://blog.csdn.net/xmy306538517/article/details/78771018
https://blog.csdn.net/sean_xyz/article/details/65445038
2. kinect v2 准备
①运行指令:
roslaunch kinect2_bridge kinect2_bridge.launch publish_tf:=true
这时,kinect2的红外灯会亮一会然后熄灭, 白灯也会过一段时间熄灭。
出现打印 INFO] [1478769022.036459690]: [Kinect2Bridge::main] waiting for clients to connect,表示kinect2启动成功
如果遇到下面的问题:
![]()
请执行:
source ~/catkin_ws/devel/setup.bash
②查看相关节点,与测试无关,但有助于后边指令的理解
查看kinect2启动后的topic :
rostopic list
出现结果:
/kinect2/bond
/kinect2/hd/camera_info
/kinect2/hd/image_color
/kinect2/hd/image_color/compressed
/kinect2/hd/image_color_rect
/kinect2/hd/image_color_rect/compressed
/kinect2/hd/image_depth_rect
/kinect2/hd/image_depth_rect/compressed
/kinect2/hd/image_mono
/kinect2/hd/image_mono/compressed
/kinect2/hd/image_mono_rect
/kinect2/hd/image_mono_rect/compressed
/kinect2/hd/points
/kinect2/qhd/camera_info
/kinect2/qhd/image_color
/kinect2/qhd/image_color/compressed
/kinect2/qhd/image_color_rect
/kinect2/qhd/image_color_rect/compressed
/kinect2/qhd/image_depth_rect
/kinect2/qhd/image_depth_rect/compressed
/kinect2/qhd/image_mono
/kinect2/qhd/image_mono/compressed
/kinect2/qhd/image_mono_rect
/kinect2/qhd/image_mono_rect/compressed
/kinect2/qhd/points
/kinect2/sd/camera_info
/kinect2/sd/image_color_rect
/kinect2/sd/image_color_rect/compressed
/kinect2/sd/image_depth
/kinect2/sd/image_depth/compressed
/kinect2/sd/image_depth_rect
/kinect2/sd/image_depth_rect/compressed
/kinect2/sd/image_ir
/kinect2/sd/image_ir/compressed
/kinect2/sd/image_ir_rect
/kinect2/sd/image_ir_rect/compressed
/kinect2/sd/points
/rosout
/rosout_agg
其中,hd 表示1080P(1920x1080),qhd表示hd的四分之一大小 960x540,
sd 大小应该是640x480, 实际大小是 height: 424 width: 512
可以看到其中主要的是hd,qhd,sd三类,每一类都包含相机信息、彩色、深度、红外等数据,再加上最后的输出。
使用对应工具去 查看感兴趣的topic, 可以使用image_view查看,例如:
rosrun image_view image_view image:=/kinect2/qhd/image_color
也可以使用kinect2_view查看深度图(12位,image_view看不了)。
3.建图模式
在线可视化有两种选择:rtabmapviz或rviz。
使用RVIZ插件进行建图,点云可以逐步添加到RVIZ。
但是使用rtabmapviz,界面应该看起来像独立版本的教程。
使用下面的启动文件rtabmap.launch,设置rviz:= true以打开rviz和rtabmapviz:= true以打开rtabmapviz(默认为true)以进行可视化。
用默认的rtabmapviz进行建图
①执行官方给的指令tf
rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link kinect2_link 100
该指令主要是前半部分涉及静态转换(本人猜测是坐标转换或者标定,没有细查),后半部分涉及传感器选择的帧来源。
该指令默认的是qhd,即默认960*540.其对应的帧是kinect2_rgb_optical_frame,这一点可以不用管它。
如果使用的是hd, 那么对应的frame也是kinect2_rgb_optical_frame,hd和qhd的尺寸图像都是基于rgd镜头的,所以它们的frame是彩色镜头的frame。
如果使用的是sd, 那么对应的frame是kinect2_ir_optical_frame, 红外镜头的frame。
比如上面指令可以改成
rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link kinect2_rgb_optical_frame 100
②启动rtabmap_ros_
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rgb_topic:=/kinect2/qhd/image_color_rect depth_topic:=/kinect2/qhd/image_depth_rect camera_info_topic:=/kinect2/qhd/camera_info
指令解析:
roslaunch 启动文件 ,其操作对象是.launch文件,
所以第一句话就是启动rtabmap_ros文件的意思
rtabmap_args:="–delete_db_on_start" 是说启动前先删除数据库db下的数据。
rgb_topic:=/kinect2/qhd/image_color_rect depth_topic:=/kinect2/qhd/image_depth_rect camera_info_topic:=/kinect2/qhd/camera_info
topic是ROS系统里的架构,这一步就是指定rgb彩色数据、depth深度数据、相机参数信息分别对应好哪个topic。这也是为什么之前会列出kinect v2的所有topic节点。
这样,大家就可以根据自己喜好去选择hd,qhd or sd的数据源,然后写出相应的建图指令。
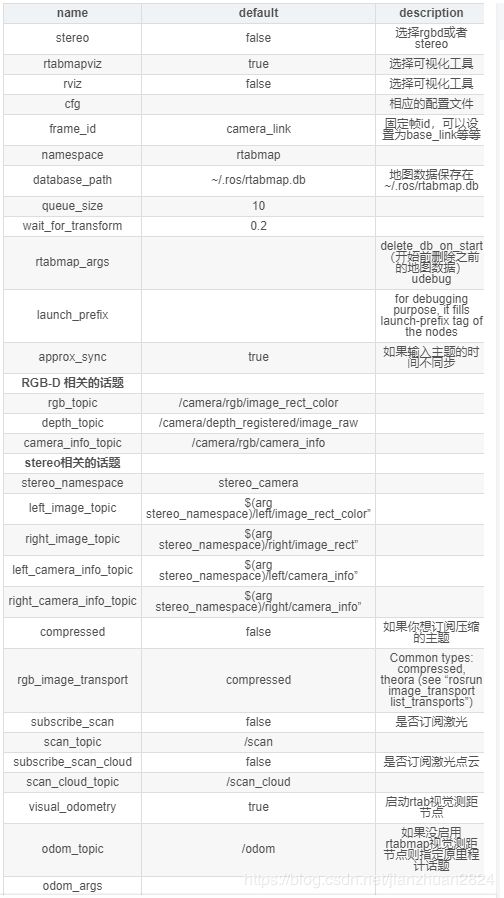
rtabmap.launch参数解析
来自:https://blog.csdn.net/xmy306538517/article/details/78771018
终端指令小结
一般使用默认情况下的qhd即可:
建立连接:
roslaunch kinect2_bridge kinect2_bridge.launch publish_tf:=true
静态tf:
rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link kinect2_link 100
启动文件:
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rgb_topic:=/kinect2/qhd/image_color_rect depth_topic:=/kinect2/qhd/image_depth_rect camera_info_topic:=/kinect2/qhd/camera_info
地图数据保存在 ~/.ros/rtabmap.db
可利databaseViewer工具查看数据库
rtabmap-databaseViewer ~/.ros/rtabmap.db
注:
①在三维点云地图中右键取消Z轴锁定,即可以上帝视角查看三维模型
②indigo版本和kinect版本之间的mapdata格式存在差异,不同版本之间发布和订阅会出现无tf输出的情况(没明白)
原地转2圈,手持深度相机进行测试,结果图如下:

用rviz建图
在启动.launch文件的指令后边添加一句设置即可
rviz:= true
进去后可以有很多参数进行设置,可自行玩耍