搭建VINS-MONO环境与评估EuRoc定位精度、安装RealSense ZR300、D435驱动
本周顺利搭建了Vins-Mono框架并跑通示例,计算了Vins-Mono在EuRoc数据集上的定位精度,也安装了RealSense ZR300和RealSense D435两款深度摄像头进行具体测试实验。记录一下整体的安装与配置流程,并总结遇到的问题。
参考博客:
https://blog.csdn.net/q1370992706/article/details/79950542
一、VINS-Mono环境搭建
VINS-Mono是单目视觉惯性系统的实时SLAM框架。它使用基于优化的滑动窗口配方来提供高精度的视觉惯性里程计,具有高效的IMU预积分,包括偏差校正,自动估算器初始化,在线外部校准,故障检测和恢复,回环检测,全局位姿图优化,地图合并,位姿图重用,在线时间校准,卷帘快门支持。VINS-Mono主要用于自主无人机的状态估计和反馈控制,但它也能够为AR应用提供精确的定位。
官方代码链接:https://github.com/HKUST-Aerial-Robotics/VINS-Mono
此代码在Linux上运行,并与ROS完全集成。
1)、安装ROS工具包与依赖项ceres-solver
首先确认VINS-Mono安装的环境要求为Ubuntu 16.04与ROS Kinetic,由于之前已经安装了ROS Kinetic,在这里不再进行过多赘述。【详情请参考本人上一篇博客Ubuntu16.04下的ORB SLAM2环境搭建教程中的ROS安装过程】
接下来安装一些ROS的额外工具包,命令行如下:
sudo apt-get install ros-kinetic-cv-bridge ros-kinetic-tf ros-kinetic-message-filters ros-kinetic-image-transport
下面安装依赖项ceres-solver,官网链接为:http://ceres-solver.org/installation.html
Tips.注意,这里一定要留心版本问题,官网明确指出了:Our testing environment: Ubuntu 16.04, ROS Kinetic, OpenCV 3.3.1, Eigen 3.3.3,在我尝试的过程中,发现OpenCV版本不一致没有什么影响,但如果Eigen版本不对是一定会出问题的。
当时我的全部环境都已经安装配置完毕,但运行EuRoC MAV数据集时只能显示特征点,没有定位的轨迹地图,各种重新编译试错都没能解决问题。最后尝试将euroc.launch的ROS节点截断,通过查看源码定位到estimator.cpp的第321行,发现estimator没能正确初始化,怀疑是Eigen版本不对,于是重新手动安装了Eigen3.3.3版本,环境也全部重新编译最终才正确显示。在这里万分感谢某位不愿透露姓名的大神同事帮忙调试源码。

建议直接手动安装Eigen3.3.3版本,安装包下载网址:http://eigen.tuxfamily.org/index.php?title=Main_Page
在官网下载Eigen 3.3.3. : tar.gz 格式压缩文件,之后运行如下命令行:
#将eigen-eigen-5a0156e40feb.tar.g文件解压到/usr/local/include目录下
sudo tar -xzvf eigen-eigen-5a0156e40feb.tar.gz -C /usr/local/include #-C 建立解压缩档案
#将eigen-eigen-5a0156e40feb文件更名为eigen3
sudo mv /usr/local/include/eigen-eigen-5a0156e40feb /usr/local/include/eigen3
#将目录Eigen下的所有文件及其子目录复制到目录/usr/local/include中
sudo cp -r /usr/local/include/eigen3/Eigen /usr/local/include
Tips.注意,因为eigen3 被默认安装到usr/local/include里,是系统默认路径,在很多程序中include时经常使用#include
而不是使用#include
,所以要做上述处理,否则一些程序在编译时会因找不到Eigen/Dense而报错。
这里最好再执行语句:sudo cp usr/local/include/eigen3/ /usr/include/ -R复制一份到/usr/include/目录,否则后面会遇到一个错误,具体情况后文会进行说明。
OPenCV的安装这里就不多做介绍了,接下来安装ceres-solver ,命令行如下:
# CMake
sudo apt-get install cmake
# google-glog + gflags
sudo apt-get install libgoogle-glog-dev
# BLAS & LAPACK
sudo apt-get install libatlas-base-dev
# Eigen3
sudo apt-get install libeigen3-dev
git clone https://github.com/ceres-solver/ceres-solver
cd ceres-solver
mkdir build
cd build
cmake ..
make -j4
sudo make install
2)、安装与编译VINS-Mono
直接按照如下命令行进行VINS-Mono的安装:
mkdir -p vins-mono-catkin_ws/src #新建文件夹,这里我的文件夹命名为vins-mono-catkin_ws
cd vins-mono-catkin_ws/src/
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Mono.git
cd ../
catkin_make
source ~/vins-mono-catkin_ws/devel/setup.bash
3)、运行Vins-Mono
下载EuRoC MAV数据集,运行Vins-Mono检验是否安装成功。
数据集链接:https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
选择Machine Hall 01的ROS bag进行下载,里面包含摄像头拍摄的视频帧图像、imu惯导信息,以及Ground-Truth真值等等。
之后打开四个终端,分别输入如下命令行:
source devel/setup.bash
roslaunch vins_estimator euroc.launch
source devel/setup.bash
roslaunch vins_estimator vins_rviz.launch
source devel/setup.bash
roslaunch benchmark_publisher publish.launch sequence_name:=MH_01_easy
#能够在界面上显示Ground-Truth真值,红线为真值,绿线为实时定位结果
source devel/setup.bash
rosbag play YOUR_PATH_TO_DATASET/MH_01_easy.bag
Tips.注意,这里要记得执行命令行
source devel/setup.bash,将对应的launch文件添加到路径里,否则会报如下错误:
[catvehicle.launch] is neither a launch file in package [pilotless_automobile] nor is [pilotless_automobile] a launch file name The traceback for the exception was written to the log file
如果无法正常运行,查看vins-mono-catkin_ws/src/VINS-Mono/config/euroc/euroc_config.yaml 该yaml文件中的输出路径是否正确,新建一个自己的输出路径。同时将euroc.launch第三行代码前面的Tab空格去掉。
正确运行结束后的界面如下图所示:

在执行vins_estimator euroc.launch的终端中执行命令s能够对当前轨迹地图进行保存。
4)、评估定位精度
接下来介绍对Vins-Mono定位精度的评估方式。在这里我使用了ORB_SLAM2框架中的评估脚本,通过计算绝对轨迹误差(ATE)测量视觉SLAM系统的性能,其官网链接如下:
https://vision.in.tum.de/data/datasets/rgbd-dataset/tools
下载associate.py脚本,该脚本定义了如何对齐时间戳,同时下载误差的计算脚本evaluate_ate.py。
在你的输出路径中找到文件vins_result_loop.csv ,此文件记录了回环后相机坐标系下的Vins-Mono定位位置坐标数据,在Vins-Mono源码中找到vins-mono-catkin_ws/src/VINS-Mono/benchmark_publisher/config/MH_01_easy/data.csv,此文件中的数据为数据集中的Ground-Truth真值,采用的是世界坐标系。
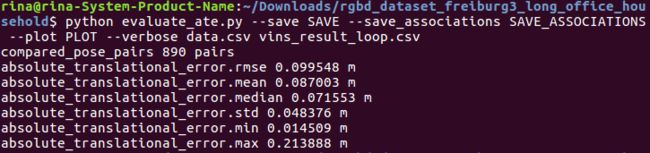
执行如下命令行获得Vins-Mono的定位均方根误差:
python evaluate_ate.py --save SAVE --save_associations SAVE_ASSOCIATIONS --plot PLOT --verbose data.csv vins_result_loop.csv
屏幕上会显示计算后的误差结果,如下图所示:
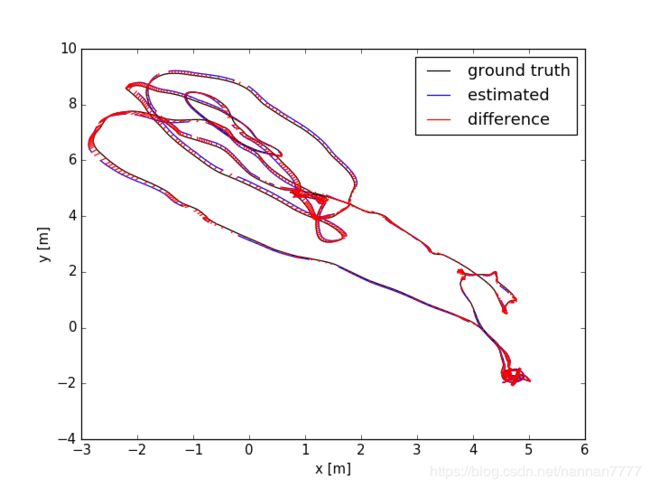
同时会输出轨迹上各个时间戳的定位误差图,如下图所示:
二、安装Intel RealSense ZR300驱动
英特尔RealSense深度鱼眼摄像头ZR300内置惯导IMU,较一般的深度摄像头有着更高的定位精度。
官网链接:https://github.com/IntelRealSense/realsense_sdk_zr300
1)、安装驱动Maplab_Realsense
官网链接:https://github.com/ethz-asl/maplab_realsense
这里使用的ROS上RealSense的驱动是eth-asl的maplab_realsense,这个程序对IMU的陀螺仪、加速度计、图像的时间戳做了对齐处理。通过实验发现,RealSense ZR300的加速度计和陀螺仪的时间戳不是完全相同的,这主要是由于RealSense ZR300的加速度计的频率为250Hz而陀螺仪的频率为200Hz,但是由于RealSense ZR300的时间戳是在硬件上打的,不是操作系统接收到到图像和IMU的时间戳,所以可以通过插值的方式使它们的时间戳对齐。
下面是maplab_realsense的安装与编译过程,命令行如下:
mkdir -p realsense_ws/src #新建自己的安装路径,我自己的安装文件夹为realsense_ws
cd realsense_ws/src
sudo apt install ros-kinetic-librealsense
git clone https://github.com/catkin/catkin_simple
git clone https://github.com/ethz-asl/glog_catkin
git clone https://github.com/ethz-asl/gflags_catkin
git clone https://github.com/ethz-asl/eigen_catkin
git clone https://github.com/ethz-asl/maplab_realsense.git
git clone https://github.com/ethz-asl/cuckoo_time_translator.git
sudo apt-get install autoconf
sudo apt-get install python-catkin-tools # 安装catkin编译工具
cd ..
catkin build maplab_realsense
在这里,我遇到一个问题,Failed << maplab_realsense :cmake 如下图所示:

问题的原因是cmake中将Eigen3写为绝对路径user/include/eigen3/,而在上文中我们将Eigen3安装于user/local/include/中,也就是上文提及的安装Eigen3时可能会遇到的问题,执行命令行:sudo cp usr/local/include/eigen3/ /usr/include/ -R 复制一份到/usr/include/目录即可。
编译不报错后,将RealSense ZR300摄像头连接电脑,使用下面的命令运行maplab-realsense:
source devel/setup.bash
roslaunch maplab_realsense maplab_realsense.launch
如不报错则证明驱动已安装成功。
2)、用RealSense ZR300摄像头跑Vins-Mono
需要修改Vins-Mono的config/realsense/realsense_fisheye_config.yaml文件中IMU和Image的topic为/zr300_node/imu和/zr300_node/fisheye/image_raw,标定参数可以不修改(为了更高的精度,也可以使用camodocal进行标定),然后打开两个终端,分别运行Vins-Mono的estimator和rviz,以及启动相机驱动,命令行如下:
source devel/setup.bash
roslaunch maplab_realsense maplab_realsense.launch
source devel/setup.bash
roslaunch vins_estimator realsense_fisheye.launch
source devel/setup.bash
roslaunch vins_estimator vins_rviz.launch
如果无法正常运行,查看vins-mono-catkin_ws/src/VINS-Mono/config/realsense/realsense_fisheye_config.yaml 该yaml文件中的输出路径是否正确,新建一个自己的输出路径。同时将realsense_fisheye.launch第三行代码前面的Tab空格去掉。
正确运行结束后的界面如下图所示:

Tips. 注意,这里IMU的topic为
imu_topic: "/zr300_node/imu",而不是原来的image_raw,否则会出现无法对齐IMU造成只有相机特征点没有相机运动轨迹图像的bug…这里我踩坑了很久,调试起来有点费劲。
三、安装Intel RealSense D435驱动
英特尔RealSense深度摄像头D435捕捉最远距离可以达到10米,而且在户外阳光下也可以使用,支持输出1280x720分辨率的深度画面,视频传输方面可以达到90fps。
英文版官方手册:
https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md#installing-the-packages
1)、注册用户使用密钥
注册用户密钥,执行命令行如下:
sudo apt-key adv --keyserver keys.gnupg.net --recv-key C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C8B3A55A6F3EFCDE
2)、加入更新源列表
更新资源列表,执行命令行如下:
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
sudo rm -f /etc/apt/sources.list.d/realsense-public.list
sudo apt-get update #更新
3)、安装驱动
安装驱动与一些需要的工具包,执行命令行如下:
sudo apt-get install librealsense2-dkms)
sudo apt-get install librealsense2-utils #安装演示程序
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg #安装RGB-D相机开发需要的工具包
安装完毕后执行realsense-viewer,能正确显示相机拍摄的深度图像界面,如下图所示,则证明驱动已正确安装。

可太难了,各种重装重卸,人心都疯球了…好在结果是好的,继续加油呀。
艰难学习SLAM的乔木同学
记于2019年11月07日