一文带你了解V4L2
本文转自https://linus.blog.csdn.net/article/details/103501939
目录
1.1、什么是v4l2
1.2、从应用层看V4L2
1.3、从驱动层看V4L2
3.1 关系绑定
3.2 函数绑定
1.1、什么是v4l2
V4L2(video for linux two的缩写)是Linux下关于视频采集相关设备的驱动框架,为驱动和应用程序提供了一套统一的接口规范。V4L2支持的设备十分广泛,但是其中只有很少一部分在本质上是真正的视频设备:
Video capture device : 从摄像头等设备上获取视频数据。对很多人来讲,video capture是V4L2的基本应用。设备名称为/dev/video,主设备号81,子设备号0~63。
Video output device : 将视频数据编码为模拟信号输出。与video capture设备名相同。
Video overlay device : 将同步锁相视频数据(如TV)转换为VGA信号,或者将抓取的视频数据直接存放到视频卡的显存中。
Video output overlay device :也被称为OSD(On-Screen Display)
VBI device : 提供对VBI(Vertical Blanking Interval)数据的控制,发送VBI数据或抓取VBI数据。设备名/dev/vbi0~vbi31,主设备号81,子设备号224~255
Radio device : FM/AM发送和接收设备。设备名/dev/radio0~radio63,主设备号81,子设备号64~127
V4L2在Linux系统中的结构图如下:
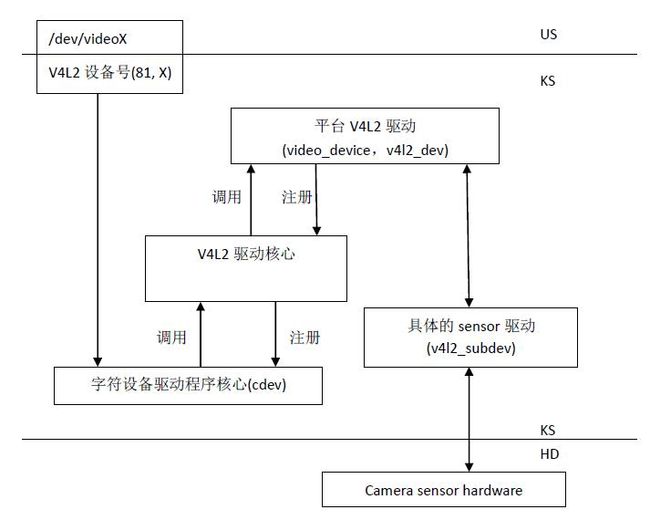
1.2、从应用层看V4L2
从V4L2简单框图可以看出,V4L2是一个字符设备,而V4L2的大部分功能都是通过设备文件的ioctl导出的。
可以将这些ioctl分类如下:
- Query Capability:查询设备支持的功能,只有VIDIOC_QUERY_CAP一个。
- 优先级相关:包括VIDIOC_G_PRIORITY,VIDIOC_S_PRIORITY,设置优先级。
- capture相关:视频捕获相关Ioctl。
capture ioctl list ID 描述
VIDIOC_ENUM_FMT 枚举设备所支持的所有数据格式
VIDIOC_S_FMT 设置数据格式
VIDIOC_G_FMT 获取数据格式
VIDIOC_TRY_FMT 与VIDIOC_S_FMT一样,但不会改变设备的状态
VIDIOC_REQBUFS 向设备请求视频缓冲区,即初始化视频缓冲区
VIDIOC_QUERYBUF 查询缓冲区的状态
VIDIOC_QBUF 从设备获取一帧视频数据
VIDIOC_DQBUF 将视频缓冲区归回给设备,
VIDIOC_OVERLAY 开始或者停止overlay
VIDIOC_G_FBUF 获取video overlay设备或OSD设备的framebuffer参数
VIDIOC_S_FBUF 设置framebuffer参数
VIDIOC_STREAMON 开始流I/O操作,capture or output device
VIDIOC_STREAMOFF 关闭流I/O操作4. 视频标准:
| ID | 描述 |
|---|---|
| VIDIOC_ENUMSTD | 枚举设备支持的所有标准 |
| VIDIOC_G_STD | 获取当前正在使用的标准 |
| VIDIOC_S_STD | 设置视频标准 |
| VIDIOC_QUERYSTD | 有的设备支持自动侦测输入源的视频标准,此时使用此ioctl查询侦测到的视频标准 |
5. input/output:
| ID | 描述 |
|---|---|
| VIDIOC_ENUMINPUT | 枚举所有input端口 |
| VIDIOC_G_INPUT | 获取当前正在使用的input端口 |
| VIDIOC_S_INPUT | 设置将要使用的input端口 |
| VIDIOC_ENUMOUTPUT | 枚举所有output端口 |
| VIDIOC_G_OUTPUT | 获取当前正在使用的output端口 |
| VIDIOC_S_OUTPUT | 设置将要使用的output端口 |
| VIDIOC_ENUMAUDIO | 枚举所有audio input端口 |
| VIDIOC_G_AUDIO | 获取当前正在使用的audio input端口 |
| VIDIOC_S_AUDIO | 设置将要使用的audio input端口 |
| VIDIOC_ENUMAUDOUT | 枚举所有audio output端口 |
| VIDIOC_G_AUDOUT | 获取当前正在使用的audio output端口 |
| VIDIOC_S_AUDOUT | 设置将要使用的audio output端口 |
6. controls:设备特定的控制,例如设置对比度,亮度
| ID | 描述 |
|---|---|
| VIDIOC_QUERYCTRL | 查询指定control的详细信息 |
| VIDIOC_G_CTRL | 获取指定control的值 |
| VIDIOC_S_CTRL | 设置指定control的值 |
| VIDIOC_G_EXT_CTRLS | 获取多个control的值 |
| VIDIOC_S_EXT_CTRLS | 设置多个control的值 |
| VIDIOC_TRY_EXT_CTRLS | 与VIDIOC_S_EXT_CTRLS相同,但是不改变设备状态 |
| VIDIOC_QUERYMENU | 查询menu |
7. 其他杂项:
controls ID 描述 VIDIOC_G_MODULATOR VIDIOC_S_MODULATOR VIDIOC_G_CROP VIDIOC_S_CROP VIDIOC_G_SELECTION VIDIOC_S_SELECTION VIDIOC_CROPCAP VIDIOC_G_ENC_INDEX VIDIOC_ENCODER_CMD VIDIOC_TRY_ENCODER_CMD VIDIOC_DECODER_CMD VIDIOC_TRY_DECODER_CMD VIDIOC_G_PARM VIDIOC_S_PARM VIDIOC_G_TUNER VIDIOC_S_TUNER VIDIOC_G_FREQUENCY VIDIOC_S_FREQUENCY VIDIOC_G_SLICED_VBI_CAP VIDIOC_LOG_STATUS VIDIOC_DBG_G_CHIP_IDENT VIDIOC_S_HW_FREQ_SEEK VIDIOC_ENUM_FRAMESIZES VIDIOC_ENUM_FRAMEINTERVALS VIDIOC_ENUM_DV_PRESETS VIDIOC_S_DV_PRESET VIDIOC_G_DV_PRESET VIDIOC_QUERY_DV_PRESET VIDIOC_S_DV_TIMINGS VIDIOC_G_DV_TIMINGS VIDIOC_DQEVENT VIDIOC_SUBSCRIBE_EVENT VIDIOC_UNSUBSCRIBE_EVENT VIDIOC_CREATE_BUFS VIDIOC_PREPARE_BUF
v4l2设备的基本操作流程如下:
- 打开设备,例如 fd = open("/dev/video0", 0)
- 查询设备能力. 例如:
struct capability cap; ioctl(fd,VIDIOC_QUERYCAP,&cap) -
设置优先级(可选).
- 配置设备。包括:
- 视频输入源的视频标准,VIDIOC_*_STD
- 视频数据的格式 , VIDIOC_*_FMT
- 视频输入端口, VIDIOC_*_INPUT
- 视频输出端口,VIDIOC_*_OUTPUT
5. 启动设备开始I/O操作。V4L2支持一下三种I/O方式:
- Read/Write:通过调用设备节点文件的Read/Write函数,与设备交互数据。打开设备后,默认使用的是此方法。
- Stream I/O:流操作,只传递数据缓冲区指针,不拷贝数据。使用此方法,需要调用VIDIOC_REQBUFS ioctl来通知设备。流操作I/O有两种方式memory map和user buffer。(具体区别后面章节介绍)
- overlay : 也可以理解为memory to memory 传输。将数据从内存拷贝到显存中。overlay设备独有的。
对于Capture device可以以如下方式启动设备:
- 调用VIDIOC_REQBUFS ioctl来分配缓冲区队列;
- 调用VIDIOC_STREAMON ioctl通知设备开始stream IO
- 调用VIDIOC_QBUF ioctl从设备获取一帧视频数据;
- 使用完数据后,调用VIDIOC_DQBUF将缓冲区还给设备,以便设备填充下一帧数据。
6. 释放资源并关闭设备。
1.3、从驱动层看V4L2
在驱动层,V4L2为驱动编写者做了很多工作。只需要实现硬件相关的代码,并且注册相关设备即可。硬件相关代码的编写,除了编写具体硬件的控制代码外,最主要的就是将代码与V4L2框架绑定。绑定主要分为以下两个部分:
- 关系绑定:也就是要将我们自己的结构体,与V4L2框架中相关连的结构体绑定在一起。
- iocontrol等函数绑定:将V4L2所定义的空的函数指针,与自己的函数绑定在一起。
3.1 关系绑定
提到关系绑定,就必须介绍下V4L2几个重要结构体。
- struct video_device:主要的任务就是负责向内核注册字符设备
- struct v4l2_device:一个硬件设备可能包含多个子设备,比如一个电视卡除了有capture设备,可能还有VBI设备或者FM tunner。而v4l2_device就是所有这些设备的根节点,负责管理所有的子设备。
- struct v4l2_subdev:子设备,负责实现具体的功能。
v4l2_device,v4l2_subdev可以看作所有设备和子设备的基类。我们在编写自己的驱动时,往往需要继承这些设备基类,添加一些自己的数据成员。例如第三章要讲到的soc_camera_host结构体,就是继承v4l2_device,并添加了互斥锁、子设备列表等成员变量。
 转存失败重新上传取消转存失败重新上传取消正在上传…重新上传取消
转存失败重新上传取消转存失败重新上传取消正在上传…重新上传取消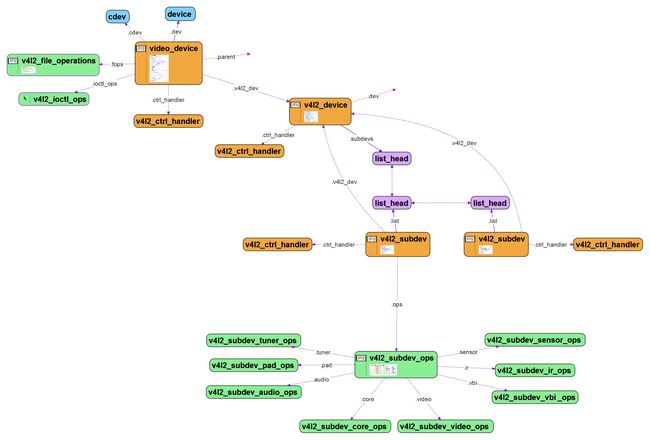 转存失败重新上传取消转存失败重新上传取消v4l2 framework 简略版
转存失败重新上传取消转存失败重新上传取消v4l2 framework 简略版
绑定的基本流程
根据需要”重载”v4l2_device或v4l2_subdev结构体,添加需要的结构体成员。例如 :
linux/include/media/soc_camera.h文件中soc_camera_host重载了v4l2_device:
struct soc_camera_host {
struct v4l2_device v4l2_dev;
struct list_head list;
struct mutex host_lock; /* Protect during probing */
unsigned char nr; /* Host number */
void *priv;
const char *drv_name;
struct soc_camera_host_ops *ops;
};linux/drivers/media/video/Ml86v7667.c中ml86v7667_priv结构体”重载”了v4l2_subdev:
struct ml86v7667_priv {
struct v4l2_subdev sd;
struct v4l2_ctrl_handler hdl;
v4l2_std_id std;
};v4l2_device与V4L2框架的绑定:通过调用v4l2_device_register函数实现。例如,上面提到的soc_camera_host的绑定:
int soc_camera_host_register(struct soc_camera_host *ici)
{
struct soc_camera_host *ix;
int ret;
if (!ici || !ici->ops ||
!ici->ops->try_fmt ||
!ici->ops->set_fmt ||
!ici->ops->set_bus_param ||
!ici->ops->querycap ||
((!ici->ops->init_videobuf ||
!ici->ops->reqbufs) &&
!ici->ops->init_videobuf2) ||
!ici->ops->add ||
!ici->ops->remove ||
!ici->ops->poll ||
!ici->v4l2_dev.dev)
return -EINVAL;
if (!ici->ops->set_crop)
ici->ops->set_crop = default_s_crop;
if (!ici->ops->get_crop)
ici->ops->get_crop = default_g_crop;
if (!ici->ops->cropcap)
ici->ops->cropcap = default_cropcap;
if (!ici->ops->set_parm)
ici->ops->set_parm = default_s_parm;
if (!ici->ops->get_parm)
ici->ops->get_parm = default_g_parm;
if (!ici->ops->enum_fsizes)
ici->ops->enum_fsizes = default_enum_fsizes;
mutex_lock(&list_lock);
list_for_each_entry(ix, &hosts, list) {
if (ix->nr == ici->nr) {
ret = -EBUSY;
goto edevreg;
}
}
ret = v4l2_device_register(ici->v4l2_dev.dev, &ici->v4l2_dev);
if (ret < 0)
goto edevreg;
list_add_tail(&ici->list, &hosts);
mutex_unlock(&list_lock);
mutex_init(&ici->host_lock);
scan_add_host(ici);
return 0;
edevreg:
mutex_unlock(&list_lock);
return ret;
}v4l2_subdev与v4l2_device的绑定:通过v4l2_device_register_subdev函数,将subdev注册到根节点上。例如:
static int soc_camera_platform_probe(struct platform_device *pdev)
{
struct soc_camera_host *ici;
struct soc_camera_platform_priv *priv;
struct soc_camera_platform_info *p = pdev->dev.platform_data;
struct soc_camera_device *icd;
int ret;
if (!p)
return -EINVAL;
if (!p->icd) {
dev_err(&pdev->dev,
"Platform has not set soc_camera_device pointer!\n");
return -EINVAL;
}
priv = kzalloc(sizeof(*priv), GFP_KERNEL);
if (!priv)
return -ENOMEM;
icd = p->icd;
/* soc-camera convention: control's drvdata points to the subdev */
platform_set_drvdata(pdev, &priv->subdev);
/* Set the control device reference */
icd->control = &pdev->dev;
ici = to_soc_camera_host(icd->parent);
v4l2_subdev_init(&priv->subdev, &platform_subdev_ops);
v4l2_set_subdevdata(&priv->subdev, p);
strncpy(priv->subdev.name, dev_name(&pdev->dev), V4L2_SUBDEV_NAME_SIZE);
ret = v4l2_device_register_subdev(&ici->v4l2_dev, &priv->subdev);
if (ret)
goto evdrs;
return ret;
evdrs:
platform_set_drvdata(pdev, NULL);
kfree(priv);
return ret;
}video_device与v4l2_device的绑定:将v4l2_device的地址赋值给video_device的v4l2_dev即可。
此步不一定必要。只要有办法通过文件节点file(struct file)找到v4l2_device即可。3.2 函数绑定
在v4l2 framework 简略版图中,绿色的方框都是需要我们绑定并实现的。
其中v4l2_file_operations和v4l2_ioctl_ops是必须实现的。而v4l2_subdev_ops下的八类ops中,v4l2_subdev_core_ops是必须实现的,其余需要根据设备类型选择实现的。比如video capture类设备需要实现v4l2_subdev_core_ops, v4l2_subdev_video_ops。
- v4l2_file_operations:实现文件类操作,比如open,close,read,write,mmap等。但是ioctl是不需要实现的,一般都是用video_ioctl2代替。例如linux/drivers/media/video/soc_camera.c文件中soc_camera_fops的实现:
static struct v4l2_file_operations soc_camera_fops = {
.owner = THIS_MODULE,
.open = soc_camera_open,
.release = soc_camera_close,
.unlocked_ioctl = video_ioctl2,
.read = soc_camera_read,
.mmap = soc_camera_mmap,
.poll = soc_camera_poll,
};- v4l2_ioctl_ops:V4L2导出给应用层使用的所有ioctl都是在这个地方实现的。但不必全部实现,只实现自己相关的ioctl即可。例如linux/drivers/media/video/soc_camera.c中soc_camera_ioctl_ops的实现:
static const struct v4l2_ioctl_ops soc_camera_ioctl_ops = {
.vidioc_querycap = soc_camera_querycap,
.vidioc_try_fmt_vid_cap = soc_camera_try_fmt_vid_cap,
.vidioc_g_fmt_vid_cap = soc_camera_g_fmt_vid_cap,
.vidioc_s_fmt_vid_cap = soc_camera_s_fmt_vid_cap,
.vidioc_enum_fmt_vid_cap = soc_camera_enum_fmt_vid_cap,
.vidioc_enum_input = soc_camera_enum_input,
.vidioc_g_input = soc_camera_g_input,
.vidioc_s_input = soc_camera_s_input,
.vidioc_s_std = soc_camera_s_std,
.vidioc_g_std = soc_camera_g_std,
.vidioc_enum_framesizes = soc_camera_enum_fsizes,
.vidioc_reqbufs = soc_camera_reqbufs,
.vidioc_querybuf = soc_camera_querybuf,
.vidioc_qbuf = soc_camera_qbuf,
.vidioc_dqbuf = soc_camera_dqbuf,
.vidioc_create_bufs = soc_camera_create_bufs,
.vidioc_prepare_buf = soc_camera_prepare_buf,
.vidioc_streamon = soc_camera_streamon,
.vidioc_streamoff = soc_camera_streamoff,
.vidioc_cropcap = soc_camera_cropcap,
.vidioc_g_crop = soc_camera_g_crop,
.vidioc_s_crop = soc_camera_s_crop,
.vidioc_g_parm = soc_camera_g_parm,
.vidioc_s_parm = soc_camera_s_parm,
.vidioc_g_chip_ident = soc_camera_g_chip_ident,
#ifdef CONFIG_VIDEO_ADV_DEBUG
.vidioc_g_register = soc_camera_g_register,
.vidioc_s_register = soc_camera_s_register,
#endif
};-
v4l2_subdev_ops:v4l2_subdev有可能需要实现的ops的总合。分为8类,core,audio,video,vbi,tuner......等。例如linuxdriversmediavideosoc_camera_platform.c中platform_subdev_ops的实现
static struct v4l2_subdev_video_ops platform_subdev_video_ops = {
.s_stream = soc_camera_platform_s_stream,
.enum_mbus_fmt = soc_camera_platform_enum_fmt,
.cropcap = soc_camera_platform_cropcap,
.g_crop = soc_camera_platform_g_crop,
.try_mbus_fmt = soc_camera_platform_fill_fmt,
.g_mbus_fmt = soc_camera_platform_fill_fmt,
.s_mbus_fmt = soc_camera_platform_fill_fmt,
.g_mbus_config = soc_camera_platform_g_mbus_config,
};
static struct v4l2_subdev_ops platform_subdev_ops = {
.core = &platform_subdev_core_ops,
.video = &platform_subdev_video_ops,
};函数绑定只是将驱动所实现的函数赋值给相关的变量即可。