周立功CAN通讯(txt格式) 报文解析
周立功CAN通讯(txt格式) 报文解析
import os
import xlwt
from tkinter import *
filedir = os.path.dirname(sys.argv[0])
# os.chdir(filedir)
wdir = os.getcwd()
print("当前工作目录为:{}\n".format(wdir))
buffer = []
satu = [0]
bit = []
def inverse_16(dst):
bu = 0
bit.clear()
for z in range(0, 16):
turn = dst % 2
bit.append(turn)
dst = dst // 2
# print(bit)
if bit[15] == 1:
for z in range(16):
if bu == 1:
if bit[z] == 1:
bit[z] = 0
# if bit[z] == 0:
elif bit[z] == 0:
bit[z] = 1
if bit[z] == 1:
bu = 1
dst1_un = bit[0] + bit[1] * 2 + bit[2] * 4 + bit[3] * 8 + bit[4] * 16 + bit[5] * 32 + bit[6] * 64 + bit[
7] * 128 + bit[8] * 256 + bit[9] * 512 + bit[10] * 1024 + bit[11] * 2048 + bit[12] * 4096 + bit[13] * 8192 + \
bit[14] * 16384
dst1 = dst1_un * (-1)
return dst1
# print(bit)
elif bit[15] == 0:
dst2 = bit[0] + bit[1] * 2 + bit[2] * 4 + bit[3] * 8 + bit[4] * 16 + bit[5] * 32 + bit[6] * 64 + bit[7] * 128 + \
bit[8] * 256 + bit[9] * 512 + bit[10] * 1024 + bit[11] * 2048 + bit[12] * 4096 + bit[13] * 8192 + bit[
14] * 16384
return dst2
for parent, dirs, files in os.walk(wdir):
for file in files:
print(file)
workbook_760 = xlwt.Workbook() # 初始化xlwt
sheet_760 = workbook_760.add_sheet("760_Car_Speed", cell_overwrite_ok=True)
sheet_767 = workbook_760.add_sheet('767_C1', cell_overwrite_ok=True)
sheet_766 = workbook_760.add_sheet('766_left_C0_C2', cell_overwrite_ok=True)
sheet_768 = workbook_760.add_sheet('768_Right_C0_C2', cell_overwrite_ok=True)
sheet_470 = workbook_760.add_sheet('470_Tor_Ang_Rotation', cell_overwrite_ok=True)
sheet_207 = workbook_760.add_sheet('207_Tor_Sign', cell_overwrite_ok=True)
i_760 = 0 # 存放760数据时,按顺序摆放
i_767 = 0
i_766 = 0
i_768 = 0
i_470 = 0
i_207 = 0
i_207_1 = 0
if file.split('.')[-1] == "txt":
new_name = file.split('.')[0] + '.' + 'xls'
df = open(file, 'r')
lines = df.readlines()
for line in lines:
if line.strip() == '':
continue
if line.strip() == '"':
continue
id1 = line.split('\t')[3]
if id1 == '0x00000760':
time_760 = line.split('\t')[2] # 报文中提取时间
data_760 = line.split('\t')[7] # 报文中提取ID总的数据
cs_hex = data_760.split(' ')[2] # 从报文中提取车速的16进制
cs_dec = int(cs_hex, 16) # 将车速转化为十进制
sheet_760.write(i_760, 0, time_760) # 保存时间
sheet_760.write(i_760, 1, cs_dec) # 将10进制车速信息写入到xls文件
i_760 = i_760 + 1 # 对760数据进行排序
elif id1 == '0x00000766':
time_766 = line.split('\t')[2]
data_766 = line.split('\t')[7]
posi_hex_l = data_766.split(' ')[1]
posi_hex_h = data_766.split(' ')[2]
position_l = int(posi_hex_l, 16)
position_h = int(posi_hex_h, 16)
position = position_h * 256 + position_l
c2_l_766 = int(data_766.split(' ')[3], 16)
c2_h_766 = int(data_766.split(' ')[4], 16)
c2_mid = ((c2_h_766 * 256 + c2_l_766) - 32767) / 1024
c2 = c2_mid / 1000
c3_l_766 = int(data_766.split(' ')[5], 16)
c3_h_766 = int(data_766.split(' ')[6], 16)
c3 = ((c3_h_766 * 256 + c3_l_766) - 32767) / 268435456
left_position = (inverse_16(position)) / 256
sheet_766.write(i_766, 0, time_766)
sheet_766.write(i_766, 1, left_position)
sheet_766.write(i_766, 2, c2)
sheet_766.write(i_766, 3, c3)
i_766 = i_766 + 1
elif id1 == '0x00000767':
time_767 = line.split('\t')[2]
data_767 = line.split('\t')[7]
az_hex_l = data_767.split(' ')[0]
az_hex_h = data_767.split(' ')[1]
az_dec_l = int(az_hex_l, 16)
az_dec_h = int(az_hex_h, 16)
az_dec = ((az_dec_h * 256 + az_dec_l) - 32767) / 1024
sheet_767.write(i_767, 0, time_767)
sheet_767.write(i_767, 1, str(az_dec))
i_767 = i_767 + 1
elif id1 == '0x00000768':
time_768 = line.split('\t')[2]
data_768 = line.split('\t')[7]
position_l = int(data_768.split(' ')[1], 16)
position_h = int(data_768.split(' ')[2], 16)
position = position_h * 256 + position_l
right_position = inverse_16(position) / 256
c2_l_768 = int(data_768.split(' ')[3], 16)
c2_h_766 = int(data_768.split(' ')[4], 16)
c2_mid_768 = ((c2_h_766 * 256 + c2_l_768) - 32767) / 1024
c2_768 = c2_mid_768 / 1000
c3_l_768 = int(data_768.split(' ')[5], 16)
c3_h_768 = int(data_768.split(' ')[6], 16)
c3_768 = ((c3_h_768 * 256 + c3_l_768) - 32767) / 268435456
sheet_768.write(i_768, 0, time_768)
sheet_768.write(i_768, 1, right_position)
sheet_768.write(i_768, 2, c2_768)
sheet_768.write(i_768, 3, c3_768)
i_768 = i_768 + 1
elif id1 == '0x00000470':
time_470 = line.split('\t')[2]
data_470 = line.split('\t')[7]
torque_dec = int(data_470.split(' ')[3], 16)
torque = torque_dec * 0.07 - 8.96
sheet_470.write(i_470, 0, time_470)
sheet_470.write(i_470, 1, torque)
angle_dec_l = int(data_470.split(' ')[6], 16)
angle_dec_h = int(data_470.split(' ')[5], 16)
angle = (angle_dec_h * 256 + angle_dec_l) * 0.1 - 780
sheet_470.write(i_470, 2, angle) # 存储方向盘转角
speed_dec = int(data_470.split(' ')[1], 16)
speed = speed_dec * 4
sheet_470.write(i_470, 3, speed) # 存储方向盘转su
i_470 = i_470 + 1
elif id1 == '0x00000207':
time_207 = line.split('\t')[2]
data_207 = line.split('\t')[7]
torque_dec_L = int(data_207.split(' ')[6], 16)
torque_dec_H = int(data_207.split(' ')[5], 16)
torque_dec_207 = torque_dec_H * 256 + torque_dec_L
torque_207 = torque_dec_207 * 0.02 - 20.48
sheet_207.write(i_207, 0, time_207)
sheet_207.write(i_207, 1, torque_207)
sign = int(data_207.split(' ')[3], 16)
for i in range(8 - 1):
sign_L = sign % 2
buffer.append(sign_L)
sign = sign // 2
sheet_207.write(i_207, 2, buffer[4])
buffer.clear()
i_207 = i_207 + 1
workbook_760.save(new_name)
# os.remove(filename)
satu.append(1)
print("文件已转换完成,请查收!")
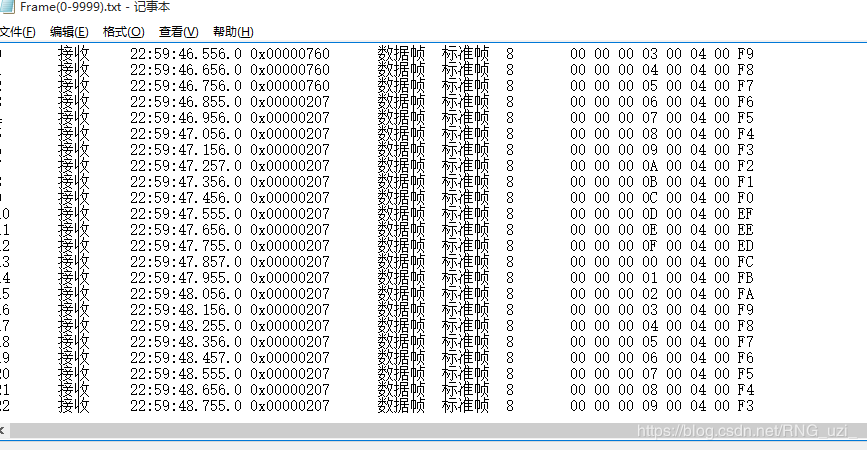
处理结果:
源文件:
解析之后: