Windows使用ROS机器人操作系统全面资料汇总
0 摘要:
本文以Win10系统中安装使用ROS1Melodic和ROS2Dashing为基础,并通过开源硬件设备Arduino与ROS的通信为示例,具体介绍机器人操作系统ROS1和ROS2的细节。部分内容已经在高校本科课程中进行讲解,详情可搜索:机器人控制器编程。
 https://microsoft.github.io/Win-RoS-Landing-Page/#
https://microsoft.github.io/Win-RoS-Landing-Page/#
- ROS官网windows安装文档网址:https://wiki.ros.org/Installation/Windows
Arduino:https://blog.csdn.net/ZhangRelay/article/details/104668711
Gazebo:https://blog.csdn.net/ZhangRelay/article/details/104900528
1 引言:
机器人操作系统ROS,可以被理解为一个特定的应用于机器人领域的物联网(IoT)系统,很多知识点和技能相似相通,学习并掌握这个工具非常重要。ROS接口丰富,并可与OpenCV,OpenAI等多种第三方开源工具结合,开发出新奇实用的各类机器人。
全平台(Windows/Linux/MacOS/……)和全语言(C++/Python/Java/……)是ROS的另一个典型特点。大部分ROS课程基于Ubuntu讲解。本课程从设计之初就考虑到不同平台使用用户特定场景之差异,课程涵盖了Windows/Linux/MacOS。但测试过程并未公开,依据大量反馈,以学生为中心,目标导向和持续改进为内核,课程将全面免费公开Windows版本内容,该版本在测试与反馈中获得较为温和评价,Windows系统目前仍然是国内占有率最高的桌面平台。
课程部分介绍资料参考链接:机器人编程实践-ROS2基础与应用-
 必备工具,请安装最新版本
必备工具,请安装最新版本
2 ROS1:
安装:http://wiki.ros.org/Installation/Windows
使用:https://ms-iot.github.io/ROSOnWindows/
中文:https://blog.csdn.net/ZhangRelay/article/details/82928141
注意:中文版本是一年以前写的,现在已经有些变动,将在下文列出。
除了基本教程,还支持服务机器人和工业机械臂。
这些在之前博客中已经详细介绍过了,这里就不再重复了。只列出一些要点:
Windows操作系统
- Windows的ROS1&2需要64位Windows 10桌面或Windows 10 IoT Enterprise。
预留安装空间
-
在继续操作之前,请清理并备份c:\opt下的所有现有数据。
-
c:\opt是指定的安装位置。当前未启用重定位。不支持安装在其他位置!!!
- 请确保C:\ 驱动器上有10 GB的可用空间用于安装和开发。
 安装路径
安装路径
安装Visual Studio 2019
为Windows生成ROS项目需要Visual Studio和Windows的Microsoft SDK。
-
下载Visual Studio 2019 (社区版免费)
- 包括“使用C++桌面开发”工作部件(工作负载)。
- 如果要构建WinML,请包括“通用Windows应用程序”工作部件。
 使用C++的桌面开发
使用C++的桌面开发
安装到D:
 d:
d:
安装Windows软件包管理器
Chocolatey是Windows的程序包管理器。它用于简化安装构建和运行ROS项目所需的工具和库的过程。
- 在“开始”菜单中,找到“ VS 2019 x64本机工具命令提示符”项。
- 右键单击,选择“更多”,然后选择“以管理员身份运行”
- 复制以下命令行:
@"%SystemRoot%\System32\WindowsPowerShell\v1.0\powershell.exe" -NoProfile -InputFormat None -ExecutionPolicy Bypass -Command "iex ((New-Object System.Net.WebClient).DownloadString('https://chocolatey.org/install.ps1'))" && SET "PATH=%PATH%;%ALLUSERSPROFILE%\chocolatey\bin" - 将其粘贴到命令窗口中。
- 批准任何提示(确定)
- 完成后,关闭命令提示符以完成安装。
安装Git:
- 如上所述,重新打开Visual Studio命令窗口。
- 即使您已将其安装为应用程序,也请使用此处的命令安装Git。
choco install git -y- 安装Git之后,请确保ROS命令提示符中现在提供了Git。
git --version- 如上所述,关闭并重新打开Visual Studio命令窗口。
二进制软件包安装
要为Windows设置ROS,请遵循以下建议步骤:
 win10中ros软件包安装
win10中ros软件包安装
ROS 1最新的(LKG)编译好的安装包-Melodic
要开始,请安装推荐的desktop_full元软件包。元软件包是其他软件包的集合。桌面完全元软件包是指构建,运行,调试和可视化机器人所需的许多其他软件包。
如上所述,以管理员身份打开Visual Studio命令提示符。
choco source add -n=ros-win -s="https://roswin.azurewebsites.net/api/v2" --priority=1
choco upgrade ros-melodic-desktop_full -y --execution-timeout=0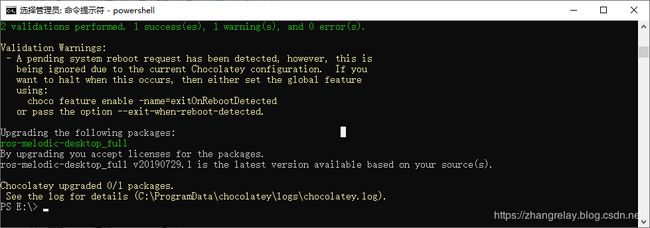 ros-melodic
ros-melodic
ROS 2最新的编译好的安装包-Dashing
要开始使用ROS 2,也可以按照类似的步骤从同一Chocolatey Feed中安装ROS 2。
例如,如果要安装最新ROS2 Dashing版本,请打开上面创建的ROS命令提示符,如果尚未打开,请批准管理标高。
choco source add -n=ros-win -s="https://roswin.azurewebsites.net/api/v2" --priority=1
choco upgrade ros-dashing-desktop -y --execution-timeout=0 --pre请一定,一定,一定测试安装是否成功!!!
ROS1:
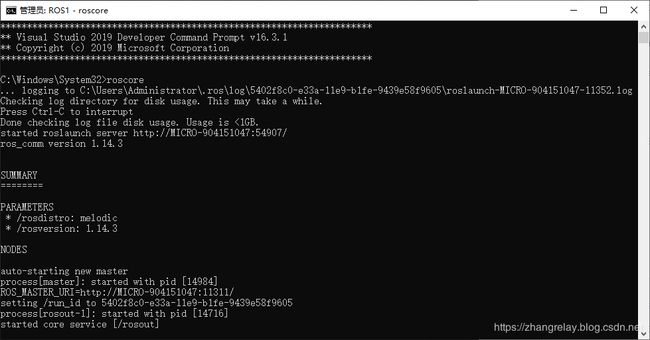 roscore
roscore
ROS2:
 发布
发布
 接收
接收
创建ROS命令窗口快捷方式
为了在Windows上使用ROS,需要在每个命令窗口中调用ROS设置脚本。为了将来不会忘记,使用自动执行此操作的ROS快捷方式将很有帮助。
- 为Visual Studio创建一个管理命令行快捷方式:
-
右键单击Windows资源管理器文件夹,选择“新建”>“快捷方式”
- 在快捷方式路径中,根据上面安装的Visual Studio,从以下选项中复制突出显示的命令行:
- 如果使用Community社区版本:
C:\Windows\System32\cmd.exe /k "C:\Program Files (x86)\Microsoft Visual Studio\2019\Community\Common7\Tools\VsDevCmd.bat" -arch=amd64 -host_arch=amd64 && c:\opt\ros\melodic\x64\setup.bat- 如果使用的是Professional:
C:\Windows\System32\cmd.exe /k "C:\Program Files (x86)\Microsoft Visual Studio\2019\Professional\Common7\Tools\VsDevCmd.bat" -arch=amd64 -host_arch=amd64 && c:\opt\ros\melodic\x64\setup.bat- 如果使用的是Enterprise:
C:\Windows\System32\cmd.exe /k "C:\Program Files (x86)\Microsoft Visual Studio\2019\Enterprise\Common7\Tools\VsDevCmd.bat" -arch=amd64 -host_arch=amd64 && c:\opt\ros\melodic\x64\setup.bat- 将快捷方式命名为“ ROS”
- 将该快捷方式设置为管理员
- 右键单击快捷方式,然后选择“属性”。
- 选择“快捷方式”选项卡(如果尚未选择)。
- 按下[进阶]按钮
- 检查按钮“以管理员身份运行”。
- 在“高级属性”对话框上按“确定”。
- 在“ ROS属性”快捷方式对话框上按“确定”。
参考:
ROS1:
C:\Windows\System32\cmd.exe /k "D:\Program Files (x86)\Microsoft Visual Studio\2019\Community\Common7\Tools\VsDevCmd.bat" -arch=amd64 -host_arch=amd64 && c:\opt\ros\melodic\x64\setup.bat
ROS2:
C:\Windows\System32\cmd.exe /k "D:\Program Files (x86)\Microsoft Visual Studio\2019\Community\Common7\Tools\VsDevCmd.bat" -arch=amd64 -host_arch=amd64 && c:\opt\ros\dashing\x64\local_setup.bat
(可选)使用新的Windows终端
Microsoft正在为Windows开发新的开源终端,该终端对内置命令行进行了许多改进,包括选项卡和外观自定义。您可以从Microsoft Store安装它。
为ROS设置终端:
- 从开始菜单中找到Windows终端,右键单击并选择“以管理员身份运行”
- 从添加选项卡(+)按钮旁边的下拉箭头中选择设置。
- 在“配置文件”部分,为ROS添加一个新块。
"profiles" :
[
{
"acrylicOpacity" : 0.5,
"background" : "#012456",
"closeOnExit" : true,
"colorScheme" : "Campbell",
"commandline" : "C:\\Windows\\System32\\cmd.exe /k \"C:\\Program Files (x86)\\Microsoft Visual Studio\\2019\\Community\\Common7\\Tools\\VsDevCmd.bat\" -arch=amd64 -host_arch=amd64 && c:\\opt\\ros\\melodic\\x64\\setup.bat",
"cursorColor" : "#FFFFFF",
"cursorShape" : "bar",
"fontFace" : "Consolas",
"fontSize" : 10,
"guid" : "{xxxxx}",
"historySize" : 9001,
"icon" : "ms-appx:///ProfileIcons/{0caa0dad-35be-5f56-a8ff-afceeeaa6101}.png",
"name" : "ROS",
"padding" : "0, 0, 0, 0",
"snapOnInput" : true,
"startingDirectory" : "c:\\ws",
"useAcrylic" : true
},- 使用guid生成器自定义“ guid”条目。
- (可选)在“全局”部分中将此GUId设置为“ defaultProfile”。
{
"globals" :
{
"alwaysShowTabs" : true,
"copyOnSelect" : false,
"defaultProfile" : "{xxxx}",
....
}
}启动新的Windows终端时,请记住以“以管理员身份运行”,方法是右键单击Windows终端并选择“以管理员身份运行”。在取消此要求之前,需要实施“ 始终运行终端”提升功能请求。
保持最新
如果要更新ROS安装,请使用Chocolatey的升级功能:
打开上面创建的ROS命令提示符,并批准管理海拔(如果尚未打开)。
运行以下命令:
choco upgrade ros-melodic-desktop_full -y --execution-timeout=0建议添加 --execution-timeout=0 ,以避免由于网络缓慢而导致的chocolatey 安装失败。
3 ROS2:
安装:https://index.ros.org/doc/ros2/Installation/Dashing/Windows-Install-Binary/
使用类似ROS1方式更为简洁,也可以使用源码编译。
ROS1和ROS2在Windows 10中详细安装调试记录参考,如下链接:
Windows安装使用ROS机器人操作系统1&2记录
安装配置完成后,可以直接与Linux或MacOS中的ROS通讯互联,也可以连接丰富外部设备。
4 Ardurno:
什么是Arduino?(课程包含avr和arm)
Arduino是一个基于易于使用的硬件和软件的开源电子平台。 Arduino开发板能够读取传感器上输入,控制灯,按钮或Twitter消息-并将其转换为输出-启动电动机,打开LED并在线发布内容。可以通过向板上的微控制器发送一组指令来告诉该怎么做。为此,可以使用Arduino编程语言(基于Wiring)和Arduino软件(IDE)(基于Processing)。
多年来,Arduino一直是数千个项目的大脑,从日常对象到复杂的科学仪器。这个开放源代码平台聚集了世界各地的开发人员社区,包括学生,业余爱好者,艺术家,程序员和专业人士,他们的贡献积累了无与伦比的可访问性知识,对新手和专家都可以提供极大的帮助。
Arduino出生于Ivrea交互设计学院,是一种快速原型制作的简便工具,主要面向没有电子和编程背景的学生。Arduino板一旦进入更广泛的社区,便开始进行更改以适应新的需求和挑战,将其产品从简单的8位板扩展到IoT应用,可穿戴,3D打印和嵌入式环境的产品。所有Arduino开发板都是完全开源的,使用户能够独立构建它们,并最终使它们适应其特定需求。该软件也是开源的,并且通过全球用户的贡献而不断发展。
为什么选择Arduino?
由于其简单易用的用户体验,Arduino已用于数千个不同的项目和应用程序中。Arduino软件对于初学者来说易于使用,但对于高级用户而言足够灵活。它可以在Mac,Windows和Linux上运行。老师和学生使用它来构建低成本的科学仪器,证明化学和物理原理,或开始编程和机器人技术。设计师和建筑师构建交互式原型,音乐家和艺术家将其用于安装并尝试新的乐器。例如,制造商当然会使用它来构建在Maker Faire上展出的许多项目。Arduino是学习新事物的关键工具。任何人-儿童,业余爱好者,艺术家,程序员-都可以按照套件的逐步说明进行修补,
还有许多其他微控制器和微控制器平台可用于物理计算。Parallax Basic Stamp,Netmedia的BX-24,Phidgets,MIT的Handyboard以及许多其他产品都提供了类似的功能。所有这些工具都采用了微控制器编程的繁琐细节,并将其包装在易于使用的程序包中。Arduino还简化了使用微控制器的过程,但与其他系统相比,它为教师,学生和感兴趣的业余爱好者提供了一些优势:
- 便宜 -与其他微控制器平台相比,Arduino板相对便宜。可以手动组装最便宜的Arduino模块版本,甚至预组装的Arduino模块的价格也不到50美元
- 跨平台 -Arduino软件(IDE)在Windows,Macintosh OSX和Linux操作系统上运行。大多数微控制器系统仅限于Windows。
- 简单,清晰的编程环境 -Arduino软件(IDE)对于初学者来说易于使用,但足够灵活,高级用户也可以利用。对于老师来说,它很方便地基于处理编程环境,因此学习在该环境中进行编程的学生将熟悉Arduino IDE的工作方式。
- 开源和可扩展软件 -Arduino软件作为开源工具发布,可供经验丰富的程序员进行扩展。可以通过C ++库扩展该语言,并且希望了解技术细节的人们可以从Arduino过渡到基于该语言的AVR C编程语言。同样,您可以根据需要将AVR-C代码直接添加到Arduino程序中。
- 开源和可扩展的硬件 -Arduino开发板的计划是在Creative Commons许可下发布的,因此经验丰富的电路设计人员可以制作自己的模块版本,进行扩展和改进。甚至相对没有经验的用户也可以构建该模块的试验板版本,以了解其工作原理并节省资金。
如何使用Arduino?
请参阅入门指南。如果您正在寻找灵感,可以在Arduino Project Hub上找到各种各样的教程。
Arduino入门指南的文本已获得 Creative Commons Attribution-ShareAlike 3.0 License的许可。该指南中的代码示例已发布到公共领域。
安装:https://www.arduino.cc/en/Main/Software
选择windows版本直接安装即可使用,在库中可以直接安装加载ROS库。
 win10 ros2 arduino
win10 ros2 arduino
5 Webots:
为什么选择Webots?
Webots是一个开放源代码的机器人模拟仿真器,它提供了完整的开发环境来对机器人进行建模,编程和仿真。全球数以千计的机构将其用于研发和教学。自1996年以来,Webots由洛桑的瑞士联邦理工学院联合开发,经过全面测试,充分记录并持续维护。它是快速获得专业成果的最有效解决方案,包括:
- 复杂机器人系统的开发 -从头开始快速原型制作
- 模拟无人驾驶汽车 -配备传感器并与环境互动
- 验证新的机器人技术 —深度学习,进化算法,多智能体等。
- 训练练习的设置 -用于机器人教室 通过操纵杆,驱动轮,踏板和VR接口
- 对飞行员进行培训 直接向您的客户
- 提供定制的仿真
Webots功能
- 精确的物理仿真模拟 -逼真的模拟依赖于已校准的模型
- 机器人,传感器,执行器和对象库 -模拟的构建块
- 导入/导出 — CAD模型,OpenStreetMap,电影,Web
- API和插件 -编程语言,集成的IDE,场景树编辑器
- 多平台 -Windows,Linux,macOS(以及更多)
投资组合:基于Webots
- 行业 -他们在研发,测试和应用程序中使用Webots
- 学术界 -他们与Webots一起进行教学和研究
- 咨询 -我们为他们提供自定义的Webots模拟
- 欧洲研究部 -我们以财团成员的身份为他们提供专业知识
开始使用
请遵循以下步骤以熟练掌握Webots:
- 在Webots中学习3D导航: Viewpoint Control [在线模拟]。
- 用Python编程机器人: 机器人编程 [在线模拟]。
- 探索更多高级编程: robotbenchmark.net [在线模拟]。
- 下载,安装Webots并遵循《 Webots用户指南》的教程。
- 运用Cyberbotics机器人课程进一步学习。
安装:https://www.cyberbotics.com/#download
选择windows版本,免费版本无服务支持。
6 V-Rep:
具有集成开发环境的机器人模拟仿真器V-REP基于分布式控制体系结构:每个对象/模型都可以通过嵌入式脚本,插件,ROS或BlueZero节点,远程API客户端或自定义进行单独控制解。这使得V-REP非常通用,非常适合多机器人应用。控制器可以用C / C ++,Python,Java,Lua,Matlab或Octave编写。
V-REP用于快速算法开发,工厂自动化仿真,快速原型制作和验证,机器人技术相关的教育,远程监控,安全性双重检查以及数字孪生等等。可以在此处找到功能概述。
安装:http://coppeliarobotics.com/downloads.html
7 Matlab:
官网:https://ww2.mathworks.cn/products/matlab.html
8 ……
待完善……
依据反馈更新修正,感谢~