环境感知与规划专题(十)——基于采样的路径规划算法(二)
前言
上一篇介绍了快速搜索随机树(RRT)算法的原理,这是一种基于采样的路径规划算法,在地图尺寸较大时,其效率将显著的优于基于图搜索的路径规划算法(如A*)。
然而,RRT也有其局限性,如:
-
狭窄通道情况下的搜索效率急剧下降
-
搜索得到的路径不是全局最优的
本篇将针对RRT算法应用时出现的几个问题展开讨论,并阐述几种RRT算法的改进型。
快速获取搜索树中的相邻节点
RRT算法中有一个重要的环节——获取搜索树种距离采样点最近的节点:
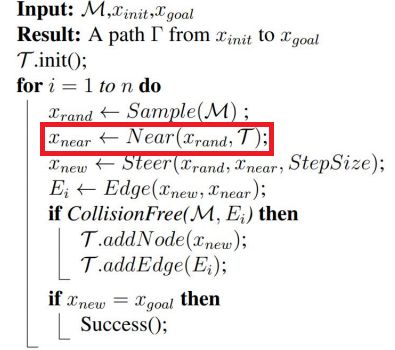
该算法的效率直接影响了RRT算法的搜索效率,因此,本篇单独对其进行讨论。
在工程中,我们将搜索树构建为KD-Tree(K-dimensional Tree),通过KD-Tree来搜索相邻节点,它改进的就是上图中的 N e a r ( x r a n d , τ ) Near(x_{rand},\tau) Near(xrand,τ)函数的效率,那么什么是KD-Tree呢?
KD-Tree(K-dimension tree)是一种对 k k k维空间中的实例点进行存储以便对其进行快速检索的树形数据结构。KD-Tree是一种二叉树,表示对 k k k维空间的一个划分,构造KD-Tree相当于不断地用垂直于坐标轴的超平面将 k k k维空间切分,构成一系列的 k k k维超矩形区域。KD-Tree的每个结点对应于一个 k k k维超矩形区域。利用KD-Tree可以省去对大部分数据点的搜索,从而减少搜索的计算量。
对于RRT算法,我们对搜索树进行KD-Tree构建,以二维问题为例,我们取所有节点中 x x x方向的中位数节点为切割点,将所有节点分为两部分,再对所有节点中 y y y方向的中位数节点为切割点分割,以此类推,最终将搜索树中的所有节点划分完毕,即得到KD-Tree。

在得到KD-Tree后,我们可以根据需要,快速地搜索到距离 x r a n d x_{rand} xrand节点最近的节点,大大提高 N e a r ( x r a n d , τ ) Near(x_{rand},\tau) Near(xrand,τ)函数的搜索效率。

狭窄通道问题(Narrow Passage)
由于RRT算法通常采用蒙特卡洛法采样,其采样概率是均匀分布的,因此,对于狭窄通道(Narrow Passage)的情况,RRT算法的搜索效率将大大降低(搜索树的生长需要经过狭窄通道才能达到目标点,而采样点刚好落在狭窄通道的概率相对于整张地图而言较低),由此,会产生如下现象:
对于该类问题,我们往往采用RRT-Connect算法进行处理,如下图所示,与RRT不同的是,RRT-Connect分别从起始点和目标点构建搜索树,直到两棵搜索树相交,找到一条可通行的路径。
该算法可以大大降低Narrow Passage中由于狭窄通道采样概率较低的问题,具体的实现在此不做赘述,读者可自行搜索Bidirectional RRT / RRT Connect。

RRT * 与 Informed-RRT*
传统的RRT算法搜索得到的路径往往不是全局最优的,于是,RRT算法的改进型——RRT*应运而生。
RRT*是在 RRT算法框架基础上进行了一定的改进,算法流程如下图所示:

与RRT相似的是,我们都需要通过 S a m p l e Sample Sample函数在地图中进行采样,然后在搜索树 τ \tau τ中寻找其最近的节点 x n e a r x_{near} xnear同时,在 x r a n d x_{rand} xrand与 $ x_{near} 连 线 方 向 进 行 扩 展 得 到 连线方向进行扩展得到 连线方向进行扩展得到x_{new} , 然 后 , 我 们 对 ,然后,我们对 ,然后,我们对x_{new} 节 点 在 地 图 中 进 行 碰 撞 检 测 , 若 节点在地图中进行碰撞检测,若 节点在地图中进行碰撞检测,若CollisionFree$则进行下一步;反之,则放弃该节点。
与RRT不同的是,RRT*中,我们在碰撞检测成功后,搜索以 R R R为半径,以 x n e w x_{new} xnew节点为圆心范围内的搜索树上的相邻节点集合 X n e a r X_{near} Xnear,即上图中的 N e a r C ( τ , x n e w ) NearC(\tau,x_{new}) NearC(τ,xnew)函数。
这里可以对上文提及的KD-Tree搜索方法进行一定的改进,即将 x n e w x_{new} xnew节点与搜索树中欧氏距离小于 R R R的所有满足条件的叶子节点添加进相邻节点集合 X n e a r X_{near} Xnear即可。
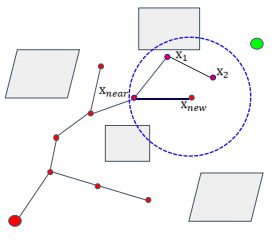
然后,在相邻节点集合 X n e a r X_{near} Xnear中为 x n e w x_{new} xnew选取其父节点,即 C h o o s e P a r e n t ( X n e a r , x n e a r , x n e w ) ChooseParent(X_{near},x_{near},x_{new}) ChooseParent(Xnear,xnear,xnew)函数,该函数通过计算集合 X n e a r X_{near} Xnear中所有叶子节点与 x n e w x_{new} xnew节点的欧氏距离的最小值来选择 x n e w x_{new} xnew节点的父节点,从而将其加入搜索树 τ \tau τ。

最后,我们需要对重建的搜索树进行剪枝( r e w i r e rewire rewire),该步骤也是RRT*的精髓。对于重建之后的搜索树,我们需要对 X n e a r X_{near} Xnear集合中的所有叶子节点到起始节点的代价(欧氏距离)进行判断,若存在更短路径,则重新修改叶子节点的父节点,从而完成剪枝。
例如, X 2 X_{2} X2节点的父节点原本为 X 1 X_{1} X1,由于 X 2 X_{2} X2经过 X n e w X_{new} Xnew到起始点的路径代价更小,因此,这里修改 X 2 X_{2} X2的父节点为 X n e w X_{new} Xnew,同理,对其他相邻节点进行类似操作,从而完成剪枝。

整个过程如下所示,可以看到,RRT* 在搜索到一条可通行路径后,并未停止迭代,而是继续剪枝。从而得到一条接近全局最优的可通行路径,因此,RRT* 较RRT在实际工程中有更广泛的应用。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-IhIoowk0-1590970362202)(http://q9ssg6bqu.bkt.clouddn.com/img/环境感知与规划专题(十)13.gif)]
从上图可以很容易地发现一个问题,当RRT*找到一条可通行路径时,其采样函数依然在整个地图空间中进行均匀采样,然而进行剪枝等操作,那么这样的采样方式显然会耗费大量不必要的时间。
Informed-RRT* 被用于优化该问题,如下图所示,Informed-RRT* 较RRT*节省了大量的时间,究其原因在于优化了采样方式。

Informed-RRT* 在得到一条可通行路径的基础上,以起始点与目标点之间的连线为椭圆的长轴构建椭圆形采样区域,采样函数的采样范围被重新限制在该区域范围之中,随着搜索树的不断剪枝,椭圆范围也在不断地缩小,采样时间也随之减少,由此,大幅度节省RRT*的时间开销。

总结
本篇阐述了一种提高RRT算法搜索效率的数据结构——KD-Tree,并围绕RRT算法应用中碰到的几个问题展开,简述了RRT算法的几种改进型——RRT* 与Informed-RRT*,下一篇中将对满足动力学约束的基于采样的路径规划算法展开讨论。
作者简介: 一个被Coding耽误的无人机算法工程师,控制、导航略懂一二,热衷技术,喜欢乒乓、音乐、电影,欢迎交流。
知乎: @遥远的乌托邦
GitHub: https://github.com/DistantUtopia
微信公众号: @遥远的乌托邦
