QT+opencv学习笔记(4)——边缘检测、轮廓提取及轮廓跟踪
开发环境为:win10+QT5.8+opencv3.2
数字图像的边缘检测是图像分割、目标区域的识别、区域形状提取等图像分析领域十分重要的基础,图像分析和理解的第一步往往就是边缘检测。轮廓跟踪是获取图像的外部轮廓特征,为图像的形状分析做准备。本文主要实现图像边缘检测、轮廓提取、轮廓跟踪。
一、读取图像
读取图像见QT+opencv学习笔记(1)——图像点运算,这里不再赘述。
读取结果如下图:
二、边缘检测
边缘是指图像局部强度变化最显著的部分。边缘主要存在与目标与目标、目标与背景、区域与区域之间。图像强度的不连续性可分为:阶跃不连续,即图像强度在不连续处的两边的像素灰度值有显著的差异;线条不连续,即图像强度从一个值变化到另一个值,保持一较小行程后又回到原来的值。
边缘检测算子检查每个像素的邻域并对灰度变换率进行量化,也包括方向的确定。大多数使用基于方向倒数掩模求卷积的方法。
下面介绍几种常用的边缘检测算子。
Canny算子
Canny算子运用比较广泛。是在Sobel算子的基础上改进的。
Canny算子的步骤是:
1.先进行滤波降噪。
2.计算梯度幅值和方向(进行Sobel算子计算)。
3.非极大值抑制。
4.滞后阈值。
Canny边缘检测可通过Canny()函数来实现。Canny()函数的定义如下:
//推荐高低阈值比例介于2:1与3:1之间
void Canny(InputArray image, //8位单通道输入图像
OutputArray edges, //输出图像,和输入图像的尺寸类型一致
double threshold1, //滞后阈值低阈值(用于边缘连接)
double threshold2, //滞后阈值高阈值(控制边缘初始段)
int apertureSize=3, //表示Sobel算子孔径大小,默认为3
bool L2gradient=false //计算图像梯度幅值的标识
);Canny边缘检测主要代码如下:
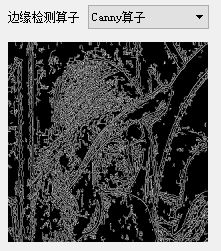
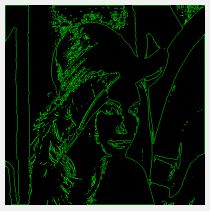
//Canny边缘检测
Canny(grayImg, edgeImg, 30, 80);Canny边缘检测处理结果如下:
Sobel算子
Sobel算子是一个主要用于边缘检测的离散微分算子,它结合了高斯平滑和微分求导,用于计算图像灰度函数的近似梯度。
Sobel算子检测方法对灰度渐变和噪声较多的图像处理效果较好,对边缘定位不是很准确,图像的边缘不止一个像素。
Sobel边缘检测可通过Sobel()函数来实现。Sobel()函数的定义如下:
void Sobel(InputArray src, //输入图像
OutputArray dst, //输出图像,和输入图像的尺寸类型一致
int ddepth, //输出图像的深度
int xorder, //x方向上的差分阶数
int yorder, //y方向上的差分阶数
int ksize=3, //Sobel核的大小,取值1,3,5,7
double scale=1, //计算倒数时的缩放因子
double delta=0, //可选delta值
int borderType=BORDER_DEFAULT //边界模式,一般默认即可
)Sobel边缘检测主要代码如下:
//Sobel边缘检测
Mat x_edgeImg, y_edgeImg;
Mat abs_x_edgeImg, abs_y_edgeImg;
/*****先对x方向进行边缘检测********/
//因为Sobel求出来的结果有正负,8位无符号表示不全,故用16位有符号表示
Sobel(grayImg,x_edgeImg, CV_16S, 1, 0, 3, 1, 1, BORDER_DEFAULT);
convertScaleAbs(x_edgeImg, abs_x_edgeImg);//将16位有符号转化为8位无符号
/*****再对y方向进行边缘检测********/
Sobel(grayImg, y_edgeImg, CV_16S, 0, 1, 3, 1, 1, BORDER_DEFAULT);
convertScaleAbs(y_edgeImg, abs_y_edgeImg);
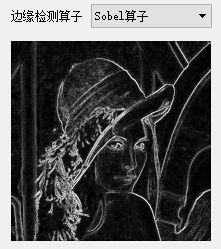
addWeighted(abs_x_edgeImg, 0.5, abs_y_edgeImg, 0.5, 0, edgeImg);Sobel边缘检测处理结果如下:
Laplacian算子
Laplacian算子边缘检测是通过二阶倒数,二阶倒数比一阶倒数的好处是在与受到周围的干扰小,其不具有方向性,操作容易,且对于很多方向的图像处理好。
Laplacian算子对噪声比较敏感,所以很少用该算子检测边缘,而是用来判断边缘像素视为与图像的明区还是暗区。
Laplacian边缘检测可通过Laplacian()函数来实现。Laplacian()函数的定义如下:
void Laplacian(InputArray src, //输入图像
OutputArray dst, //输出图像,和输入图像的尺寸类型一致
int ddepth, //输出图像的深度
int ksize=1, //用于计算二阶导数的滤波器孔径大小,须为正奇数,默认值为1
double scale=1, //可选比例因子,默认值为1
double delta=0, //可选delta值
int borderType=BORDER_DEFAULT //边界模式,一般默认即可
)Laplacian边缘检测主要代码如下:
//Laplacian边缘检测
Mat lapImg;
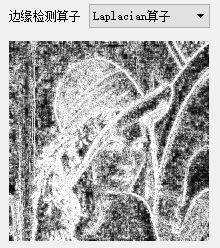
Laplacian(grayImg, lapImg, CV_16S, 5, 1, 0, BORDER_DEFAULT);
convertScaleAbs(lapImg, edgeImg); Laplacian边缘检测处理结果如下:
三、轮廓提取
轮廓的提取,边缘检测就可以做到,不过得到的轮廓比较粗糙。
图像轮廓的提取先对图像二值化,再通过findContours()函数提取轮廓,最后通过drawContours()函数将轮廓绘制出来。在将轮廓提取的结果使用imwrite函数保存到本地时,总是写不了,查了半天没找出问题,刚开始文件名为con.bmp,最后把文件名改成cont.bmp就好了,玄学。。。
findContours()函数定义如下:
void cv::findContours(
cv::InputOutputArray image, // 输入的8位单通道“二值”图像
cv::OutputArrayOfArrays contours, // 包含points的vectors的vector
cv::OutputArray hierarchy, // (可选) 拓扑信息
int mode, // 轮廓检索模式
int method, // 近似方法
cv::Point offset = cv::Point() // (可选) 所有点的偏移
); drawContours()函数定义如下:
void cv::drawContours(
cv::InputOutputArray image, // 用于绘制的输入图像
cv::InputArrayOfArrays contours, // 点的vectors的vector
int contourIdx, // 需要绘制的轮廓的指数 (-1 表示 "all")
const cv::Scalar& color, // 轮廓的颜色
int thickness = 1, // 轮廓线的宽度
int lineType = 8, // 轮廓线的邻域模式('4'邻域 或 '8'邻域)
cv::InputArray hierarchy = noArray(), // 可选 (从 findContours得到)
int maxLevel = INT_MAX, // 轮廓中的最大下降
cv::Point offset = cv::Point() // (可选) 所有点的偏移
) 轮廓提取主要代码如下:
Mat contImg = Mat ::zeros(grayImg.size(),CV_8UC3);//定义三通道轮廓提取图像
Mat binImg;
threshold(grayImg, binImg, 127, 255, THRESH_OTSU);//大津法进行图像二值化
vector> contours;
vector hierarchy;
//查找轮廓
findContours(binImg, contours, hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_NONE);
//绘制查找到的轮廓
drawContours(contImg, contours, -1, Scalar(0,255,0)); 轮廓提取处理结果如下:
四、轮廓跟踪
通常在进行边缘检测之后,需要通过边缘跟踪来将离散的边缘串接起来,常使用的方法边缘跟踪法。边缘跟踪又分为八邻域和四邻域两种。
实现步骤:
1、灰度化并进行Canny边缘检测;
2、按照预先设定的跟踪方向(顺时针)进行边缘跟踪;
3、每次跟踪的终止条件为:8邻域都不存在轮廓。
主要代码如下:
Mat edgeImg,trackImg;
// Canny边缘检测
Canny(grayImg, edgeImg, 50, 100);
vector edge_t;
vector> edges;
//边缘跟踪
EdgeTracking(edgeImg,edge_t,edges,trackImg); void Dialog::EdgeTracking(Mat& Edge,vector& edge_t,vector>& edges,Mat& trace_edge_color)
{
// 8 neighbors
const Point directions[8] = { { 0, 1 }, {1,1}, { 1, 0 }, { 1, -1 }, { 0, -1 }, { -1, -1 }, { -1, 0 },{ -1, 1 } };
int i, j, counts = 0, curr_d = 0;
for (i = 1; i < Edge.rows - 1; i++)
for (j = 1; j < Edge.cols - 1; j++)
{
// 起始点及当前点
//Point s_pt = Point(i, j);
Point b_pt = Point(i, j);
Point c_pt = Point(i, j);
// 如果当前点为前景点
if (255 == Edge.at(c_pt.x, c_pt.y))
{
edge_t.clear();
bool tra_flag = false;
// 存入
edge_t.push_back(c_pt);
Edge.at(c_pt.x, c_pt.y) = 0; // 用过的点直接给设置为0
// 进行跟踪
while (!tra_flag)
{
// 循环八次
for (counts = 0; counts < 8; counts++)
{
// 防止索引出界
if (curr_d >= 8)
{
curr_d -= 8;
}
if (curr_d < 0)
{
curr_d += 8;
}
// 当前点坐标
// 跟踪的过程,应该是个连续的过程,需要不停的更新搜索的root点
c_pt = Point(b_pt.x + directions[curr_d].x, b_pt.y + directions[curr_d].y);
// 边界判断
if ((c_pt.x > 0) && (c_pt.x < Edge.cols - 1) &&
(c_pt.y > 0) && (c_pt.y < Edge.rows - 1))
{
// 如果存在边缘
if (255 == Edge.at(c_pt.x, c_pt.y))
{
curr_d -= 2; // 更新当前方向
edge_t.push_back(c_pt);
Edge.at(c_pt.x, c_pt.y) = 0;
// 更新b_pt:跟踪的root点
b_pt.x = c_pt.x;
b_pt.y = c_pt.y;
//cout << c_pt.x << " " << c_pt.y << endl;
break; // 跳出for循环
}
}
curr_d++;
} // end for
// 跟踪的终止条件:如果8邻域都不存在边缘
if (8 == counts )
{
// 清零
curr_d = 0;
tra_flag = true;
edges.push_back(edge_t);
break;
}
} // end if
} // end while
}
// 显示一下
Mat trace_edge = Mat::zeros(Edge.rows, Edge.cols, CV_8UC1);
//Mat trace_edge_color;
cvtColor(trace_edge, trace_edge_color, CV_GRAY2BGR);
for (i = 0; i < edges.size(); i++)
{
Scalar color = Scalar(rand()%255, rand()%255, rand()%255);
// 过滤掉较小的边缘
if (edges[i].size() > 5)
{
for (j = 0; j < edges[i].size(); j++)
{
trace_edge_color.at(edges[i][j].x, edges[i][j].y)[0] = color[0];
trace_edge_color.at(edges[i][j].x, edges[i][j].y)[1] = color[1];
trace_edge_color.at(edges[i][j].x, edges[i][j].y)[2] = color[2];
}
}
}
} 轮廓跟踪处理结果如下:

整体工程代码见QT+opencv边缘检测,轮廓提取及轮廓跟踪
参考:
(1)边缘检测概念理解
(2)【OpenCV学习笔记】十九、图像边缘检测
(3)OPENCV轮廓提取findContours和drawContours
(4)【OpenCV3】图像轮廓查找与绘制——cv::findContours()与cv::drawContours()详解
(5)图像处理(五):八邻域边缘跟踪与区域生长算法