RabbitMQ集群原理
RabbitMQ是Erlang语言和平台实现的,其充分利用Erlang分布特性,实现集群功能非常容易。RabbitMQ集群分为普通模式和镜像模式,普通模式下存在单点故障,当队列创建时绑定的节点故障时,服务整体不可用。镜像队列(Mirrored queue)机制解决了RabbitMQ单点问题,保证了高可用(Highly Available)。
重点讨论镜像模式RabbitMQ集群。
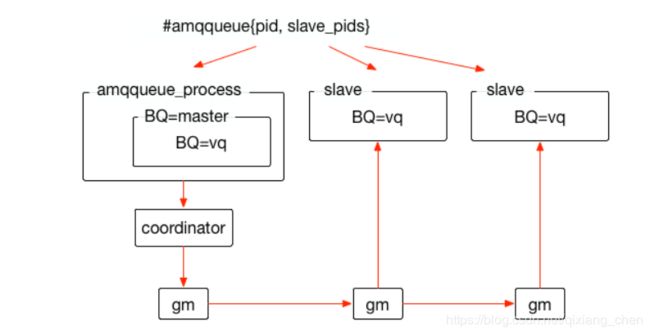
通过镜像机制,RabbitMQ将队列放置于集群中的多个节点上,消息的生产和消费都会在节点间同步。镜像队列包含一个master和多个slave,当master退出时,最老的slave被提升为新的master。
镜像队列中各节点的进程是独立的,进程间通过消息传递来通信。各节点之间通过GM协议保证消息原子性传递。

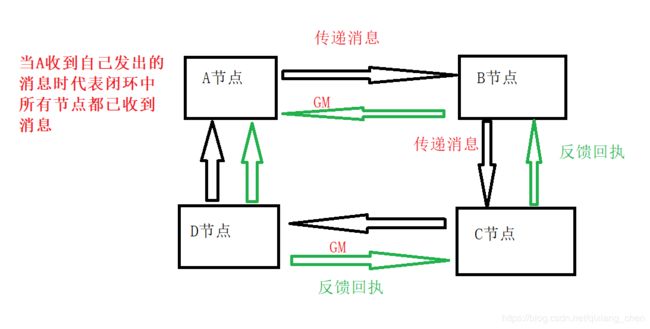
可靠多播 (Guaranteed Multicast)
广播通常的实现方法是发送者将消息发给集群中的每个节点,这要求集群节点是全联通的(fully connected)。当发送节点挂掉时,消息可能没有发到集群中的每个节点,这就引入了集群中哪些节点要为已挂掉节点负责、继续发送消息的问题。
为简化网络拓扑和实现复杂度,GM组将集群中的节点组成一个环。环中节点挂掉时,很容易知道哪些节点已收到消息、哪些节点没有收到:如果一个节点挂掉,其左右邻居节点将获悉其退出信息,然后最近的上游节点(upstream)负责将挂掉节点未转发的消息(in-flight messages)继续发给最近的下游节点(downstream)。
参考RabbitMQ源文件gm.erl
%% The contents of this file are subject to the Mozilla Public License
%% Version 1.1 (the "License"); you may not use this file except in
%% compliance with the License. You may obtain a copy of the License at
%% https://www.mozilla.org/MPL/
%%
%% Software distributed under the License is distributed on an "AS IS"
%% basis, WITHOUT WARRANTY OF ANY KIND, either express or implied. See the
%% License for the specific language governing rights and limitations
%% under the License.
%%
%% The Original Code is RabbitMQ.
%%
%% The Initial Developer of the Original Code is GoPivotal, Inc.
%% Copyright (c) 2007-2020 VMware, Inc. or its affiliates. All rights reserved.
%%
-module(gm).
%% Guaranteed Multicast
%% ====================
%%
%% This module provides the ability to create named groups of
%% processes to which members can be dynamically added and removed,
%% and for messages to be broadcast within the group that are
%% guaranteed to reach all members of the group during the lifetime of
%% the message. The lifetime of a message is defined as being, at a
%% minimum, the time from which the message is first sent to any
%% member of the group, up until the time at which it is known by the
%% member who published the message that the message has reached all
%% group members.
%%
%% The guarantee given is that provided a message, once sent, makes it
%% to members who do not all leave the group, the message will
%% continue to propagate to all group members.
%%
%% Another way of stating the guarantee is that if member P publishes
%% messages m and m', then for all members P', if P' is a member of
%% the group prior to the publication of m, and P' receives m', then
%% P' will receive m.
%%
%% Note that only local-ordering is enforced: i.e. if member P sends
%% message m and then message m', then for-all members P', if P'
%% receives m and m', then they will receive m' after m. Causality
%% ordering is _not_ enforced. I.e. if member P receives message m
%% and as a result publishes message m', there is no guarantee that
%% other members P' will receive m before m'.
%%
%%
%% API Use
%% -------
%%
%% Mnesia must be started. Use the idempotent create_tables/0 function
%% to create the tables required.
%%
%% start_link/3
%% Provide the group name, the callback module name, and any arguments
%% you wish to be passed into the callback module's functions. The
%% joined/2 function will be called when we have joined the group,
%% with the arguments passed to start_link and a list of the current
%% members of the group. See the callbacks specs and the comments
%% below for further details of the callback functions.
%%
%% leave/1
%% Provide the Pid. Removes the Pid from the group. The callback
%% handle_terminate/2 function will be called.
%%
%% broadcast/2
%% Provide the Pid and a Message. The message will be sent to all
%% members of the group as per the guarantees given above. This is a
%% cast and the function call will return immediately. There is no
%% guarantee that the message will reach any member of the group.
%%
%% confirmed_broadcast/2
%% Provide the Pid and a Message. As per broadcast/2 except that this
%% is a call, not a cast, and only returns 'ok' once the Message has
%% reached every member of the group. Do not call
%% confirmed_broadcast/2 directly from the callback module otherwise
%% you will deadlock the entire group.
%%
%% info/1
%% Provide the Pid. Returns a proplist with various facts, including
%% the group name and the current group members.
%%
%% validate_members/2
%% Check whether a given member list agrees with the chosen member's
%% view. Any differences will be communicated via the members_changed
%% callback. If there are no differences then there will be no reply.
%% Note that members will not necessarily share the same view.
%%
%% forget_group/1
%% Provide the group name. Removes its mnesia record. Makes no attempt
%% to ensure the group is empty.
%%
%% Implementation Overview
%% -----------------------
%%
%% One possible means of implementation would be a fan-out from the
%% sender to every member of the group. This would require that the
%% group is fully connected, and, in the event that the original
%% sender of the message disappears from the group before the message
%% has made it to every member of the group, raises questions as to
%% who is responsible for sending on the message to new group members.
%% In particular, the issue is with [ Pid ! Msg || Pid <- Members ] -
%% if the sender dies part way through, who is responsible for
%% ensuring that the remaining Members receive the Msg? In the event
%% that within the group, messages sent are broadcast from a subset of
%% the members, the fan-out arrangement has the potential to
%% substantially impact the CPU and network workload of such members,
%% as such members would have to accommodate the cost of sending each
%% message to every group member.
%%
%% Instead, if the members of the group are arranged in a chain, then
%% it becomes easier to reason about who within the group has received
%% each message and who has not. It eases issues of responsibility: in
%% the event of a group member disappearing, the nearest upstream
%% member of the chain is responsible for ensuring that messages
%% continue to propagate down the chain. It also results in equal
%% distribution of sending and receiving workload, even if all
%% messages are being sent from just a single group member. This
%% configuration has the further advantage that it is not necessary
%% for every group member to know of every other group member, and
%% even that a group member does not have to be accessible from all
%% other group members.
%%
%% Performance is kept high by permitting pipelining and all
%% communication between joined group members is asynchronous. In the
%% chain A -> B -> C -> D, if A sends a message to the group, it will
%% not directly contact C or D. However, it must know that D receives
%% the message (in addition to B and C) before it can consider the
%% message fully sent. A simplistic implementation would require that
%% D replies to C, C replies to B and B then replies to A. This would
%% result in a propagation delay of twice the length of the chain. It
%% would also require, in the event of the failure of C, that D knows
%% to directly contact B and issue the necessary replies. Instead, the
%% chain forms a ring: D sends the message on to A: D does not
%% distinguish A as the sender, merely as the next member (downstream)
%% within the chain (which has now become a ring). When A receives
%% from D messages that A sent, it knows that all members have
%% received the message. However, the message is not dead yet: if C
%% died as B was sending to C, then B would need to detect the death
%% of C and forward the message on to D instead: thus every node has
%% to remember every message published until it is told that it can
%% forget about the message. This is essential not just for dealing
%% with failure of members, but also for the addition of new members.
%%
%% Thus once A receives the message back again, it then sends to B an
%% acknowledgement for the message, indicating that B can now forget
%% about the message. B does so, and forwards the ack to C. C forgets
%% the message, and forwards the ack to D, which forgets the message
%% and finally forwards the ack back to A. At this point, A takes no
%% further action: the message and its acknowledgement have made it to
%% every member of the group. The message is now dead, and any new
%% member joining the group at this point will not receive the
%% message.
%%
%% We therefore have two roles:
%%
%% 1. The sender, who upon receiving their own messages back, must
%% then send out acknowledgements, and upon receiving their own
%% acknowledgements back perform no further action.
%%
%% 2. The other group members who upon receiving messages and
%% acknowledgements must update their own internal state accordingly
%% (the sending member must also do this in order to be able to
%% accommodate failures), and forwards messages on to their downstream
%% neighbours.
%%
%%
%% Implementation: It gets trickier
%% --------------------------------
%%
%% Chain A -> B -> C -> D
%%
%% A publishes a message which B receives. A now dies. B and D will
%% detect the death of A, and will link up, thus the chain is now B ->
%% C -> D. B forwards A's message on to C, who forwards it to D, who
%% forwards it to B. Thus B is now responsible for A's messages - both
%% publications and acknowledgements that were in flight at the point
%% at which A died. Even worse is that this is transitive: after B
%% forwards A's message to C, B dies as well. Now C is not only
%% responsible for B's in-flight messages, but is also responsible for
%% A's in-flight messages.
%%
%% Lemma 1: A member can only determine which dead members they have
%% inherited responsibility for if there is a total ordering on the
%% conflicting additions and subtractions of members from the group.
%%
%% Consider the simultaneous death of B and addition of B' that
%% transitions a chain from A -> B -> C to A -> B' -> C. Either B' or
%% C is responsible for in-flight messages from B. It is easy to
%% ensure that at least one of them thinks they have inherited B, but
%% if we do not ensure that exactly one of them inherits B, then we
%% could have B' converting publishes to acks, which then will crash C
%% as C does not believe it has issued acks for those messages.
%%
%% More complex scenarios are easy to concoct: A -> B -> C -> D -> E
%% becoming A -> C' -> E. Who has inherited which of B, C and D?
%%
%% However, for non-conflicting membership changes, only a partial
%% ordering is required. For example, A -> B -> C becoming A -> A' ->
%% B. The addition of A', between A and B can have no conflicts with
%% the death of C: it is clear that A has inherited C's messages.
%%
%% For ease of implementation, we adopt the simple solution, of
%% imposing a total order on all membership changes.
%%
%% On the death of a member, it is ensured the dead member's
%% neighbours become aware of the death, and the upstream neighbour
%% now sends to its new downstream neighbour its state, including the
%% messages pending acknowledgement. The downstream neighbour can then
%% use this to calculate which publishes and acknowledgements it has
%% missed out on, due to the death of its old upstream. Thus the
%% downstream can catch up, and continues the propagation of messages
%% through the group.
%%
%% Lemma 2: When a member is joining, it must synchronously
%% communicate with its upstream member in order to receive its
%% starting state atomically with its addition to the group.
%%
%% New members must start with the same state as their nearest
%% upstream neighbour. This ensures that it is not surprised by
%% acknowledgements they are sent, and that should their downstream
%% neighbour die, they are able to send the correct state to their new
%% downstream neighbour to ensure it can catch up. Thus in the
%% transition A -> B -> C becomes A -> A' -> B -> C becomes A -> A' ->
%% C, A' must start with the state of A, so that it can send C the
%% correct state when B dies, allowing C to detect any missed
%% messages.
%%
%% If A' starts by adding itself to the group membership, A could then
%% die, without A' having received the necessary state from A. This
%% would leave A' responsible for in-flight messages from A, but
%% having the least knowledge of all, of those messages. Thus A' must
%% start by synchronously calling A, which then immediately sends A'
%% back its state. A then adds A' to the group. If A dies at this
%% point then A' will be able to see this (as A' will fail to appear
%% in the group membership), and thus A' will ignore the state it
%% receives from A, and will simply repeat the process, trying to now
%% join downstream from some other member. This ensures that should
%% the upstream die as soon as the new member has been joined, the new
%% member is guaranteed to receive the correct state, allowing it to
%% correctly process messages inherited due to the death of its
%% upstream neighbour.
%%
%% The canonical definition of the group membership is held by a
%% distributed database. Whilst this allows the total ordering of
%% changes to be achieved, it is nevertheless undesirable to have to
%% query this database for the current view, upon receiving each
%% message. Instead, we wish for members to be able to cache a view of
%% the group membership, which then requires a cache invalidation
%% mechanism. Each member maintains its own view of the group
%% membership. Thus when the group's membership changes, members may
%% need to become aware of such changes in order to be able to
%% accurately process messages they receive. Because of the
%% requirement of a total ordering of conflicting membership changes,
%% it is not possible to use the guaranteed broadcast mechanism to
%% communicate these changes: to achieve the necessary ordering, it
%% would be necessary for such messages to be published by exactly one
%% member, which can not be guaranteed given that such a member could
%% die.
%%
%% The total ordering we enforce on membership changes gives rise to a
%% view version number: every change to the membership creates a
%% different view, and the total ordering permits a simple
%% monotonically increasing view version number.
%%
%% Lemma 3: If a message is sent from a member that holds view version
%% N, it can be correctly processed by any member receiving the
%% message with a view version >= N.
%%
%% Initially, let us suppose that each view contains the ordering of
%% every member that was ever part of the group. Dead members are
%% marked as such. Thus we have a ring of members, some of which are
%% dead, and are thus inherited by the nearest alive downstream
%% member.
%%
%% In the chain A -> B -> C, all three members initially have view
%% version 1, which reflects reality. B publishes a message, which is
%% forward by C to A. B now dies, which A notices very quickly. Thus A
%% updates the view, creating version 2. It now forwards B's
%% publication, sending that message to its new downstream neighbour,
%% C. This happens before C is aware of the death of B. C must become
%% aware of the view change before it interprets the message its
%% received, otherwise it will fail to learn of the death of B, and
%% thus will not realise it has inherited B's messages (and will
%% likely crash).
%%
%% Thus very simply, we have that each subsequent view contains more
%% information than the preceding view.
%%
%% However, to avoid the views growing indefinitely, we need to be
%% able to delete members which have died _and_ for which no messages
%% are in-flight. This requires that upon inheriting a dead member, we
%% know the last publication sent by the dead member (this is easy: we
%% inherit a member because we are the nearest downstream member which
%% implies that we know at least as much than everyone else about the
%% publications of the dead member), and we know the earliest message
%% for which the acknowledgement is still in flight.
%%
%% In the chain A -> B -> C, when B dies, A will send to C its state
%% (as C is the new downstream from A), allowing C to calculate which
%% messages it has missed out on (described above). At this point, C
%% also inherits B's messages. If that state from A also includes the
%% last message published by B for which an acknowledgement has been
%% seen, then C knows exactly which further acknowledgements it must
%% receive (also including issuing acknowledgements for publications
%% still in-flight that it receives), after which it is known there
%% are no more messages in flight for B, thus all evidence that B was
%% ever part of the group can be safely removed from the canonical
%% group membership.
%%
%% Thus, for every message that a member sends, it includes with that
%% message its view version. When a member receives a message it will
%% update its view from the canonical copy, should its view be older
%% than the view version included in the message it has received.
%%
%% The state held by each member therefore includes the messages from
%% each publisher pending acknowledgement, the last publication seen
%% from that publisher, and the last acknowledgement from that
%% publisher. In the case of the member's own publications or
%% inherited members, this last acknowledgement seen state indicates
%% the last acknowledgement retired, rather than sent.
%%
%%
%% Proof sketch
%% ------------
%%
%% We need to prove that with the provided operational semantics, we
%% can never reach a state that is not well formed from a well-formed
%% starting state.
%%
%% Operational semantics (small step): straight-forward message
%% sending, process monitoring, state updates.
%%
%% Well formed state: dead members inherited by exactly one non-dead
%% member; for every entry in anyone's pending-acks, either (the
%% publication of the message is in-flight downstream from the member
%% and upstream from the publisher) or (the acknowledgement of the
%% message is in-flight downstream from the publisher and upstream
%% from the member).
%%
%% Proof by induction on the applicable operational semantics.
%%
%%
%% Related work
%% ------------
%%
%% The ring configuration and double traversal of messages around the
%% ring is similar (though developed independently) to the LCR
%% protocol by [Levy 2008]. However, LCR differs in several
%% ways. Firstly, by using vector clocks, it enforces a total order of
%% message delivery, which is unnecessary for our purposes. More
%% significantly, it is built on top of a "group communication system"
%% which performs the group management functions, taking
%% responsibility away from the protocol as to how to cope with safely
%% adding and removing members. When membership changes do occur, the
%% protocol stipulates that every member must perform communication
%% with every other member of the group, to ensure all outstanding
%% deliveries complete, before the entire group transitions to the new
%% view. This, in total, requires two sets of all-to-all synchronous
%% communications.
%%
%% This is not only rather inefficient, but also does not explain what
%% happens upon the failure of a member during this process. It does
%% though entirely avoid the need for inheritance of responsibility of
%% dead members that our protocol incorporates.
%%
%% In [Marandi et al 2010], a Paxos-based protocol is described. This
%% work explicitly focuses on the efficiency of communication. LCR
%% (and our protocol too) are more efficient, but at the cost of
%% higher latency. The Ring-Paxos protocol is itself built on top of
%% IP-multicast, which rules it out for many applications where
%% point-to-point communication is all that can be required. They also
%% have an excellent related work section which I really ought to
%% read...
%%
%%
%% [Levy 2008] The Complexity of Reliable Distributed Storage, 2008.
%% [Marandi et al 2010] Ring Paxos: A High-Throughput Atomic Broadcast
%% Protocol
-behaviour(gen_server2).
-export([create_tables/0, start_link/4, leave/1, broadcast/2, broadcast/3,
confirmed_broadcast/2, info/1, validate_members/2, forget_group/1]).
-export([init/1, handle_call/3, handle_cast/2, handle_info/2, terminate/2,
code_change/3, prioritise_info/3]).
%% For INSTR_MOD callbacks
-export([call/3, cast/2, monitor/1, demonitor/1]).
-export([table_definitions/0]).
-define(GROUP_TABLE, gm_group).
-define(MAX_BUFFER_SIZE, 100000000). %% 100MB
-define(BROADCAST_TIMER, 25).
-define(FORCE_GC_TIMER, 250).
-define(VERSION_START, 0).
-define(SETS, ordsets).
-record(state,
{ self,
left,
right,
group_name,
module,
view,
pub_count,
members_state,
callback_args,
confirms,
broadcast_buffer,
broadcast_buffer_sz,
broadcast_timer,
force_gc_timer,
txn_executor,
shutting_down
}).
-record(gm_group, { name, version, members }).
-record(view_member, { id, aliases, left, right }).
-record(member, { pending_ack, last_pub, last_ack }).
-define(TABLE, {?GROUP_TABLE, [{record_name, gm_group},
{attributes, record_info(fields, gm_group)}]}).
-define(TABLE_MATCH, {match, #gm_group { _ = '_' }}).
-define(TAG, '$gm').
-export_type([group_name/0]).
-type group_name() :: any().
-type txn_fun() :: fun((fun(() -> any())) -> any()).
%% The joined, members_changed and handle_msg callbacks can all return
%% any of the following terms:
%%
%% 'ok' - the callback function returns normally
%%
%% {'stop', Reason} - the callback indicates the member should stop
%% with reason Reason and should leave the group.
%%
%% {'become', Module, Args} - the callback indicates that the callback
%% module should be changed to Module and that the callback functions
%% should now be passed the arguments Args. This allows the callback
%% module to be dynamically changed.
%% Called when we've successfully joined the group. Supplied with Args
%% provided in start_link, plus current group members.
-callback joined(Args :: term(), Members :: [pid()]) ->
ok | {stop, Reason :: term()} | {become, Module :: atom(), Args :: any()}.
%% Supplied with Args provided in start_link, the list of new members
%% and the list of members previously known to us that have since
%% died. Note that if a member joins and dies very quickly, it's
%% possible that we will never see that member appear in either births
%% or deaths. However we are guaranteed that (1) we will see a member
%% joining either in the births here, or in the members passed to
%% joined/2 before receiving any messages from it; and (2) we will not
%% see members die that we have not seen born (or supplied in the
%% members to joined/2).
-callback members_changed(Args :: term(),
Births :: [pid()], Deaths :: [pid()]) ->
ok | {stop, Reason :: term()} | {become, Module :: atom(), Args :: any()}.
%% Supplied with Args provided in start_link, the sender, and the
%% message. This does get called for messages injected by this member,
%% however, in such cases, there is no special significance of this
%% invocation: it does not indicate that the message has made it to
%% any other members, let alone all other members.
-callback handle_msg(Args :: term(), From :: pid(), Message :: term()) ->
ok | {stop, Reason :: term()} | {become, Module :: atom(), Args :: any()}.
%% Called on gm member termination as per rules in gen_server, with
%% the Args provided in start_link plus the termination Reason.
-callback handle_terminate(Args :: term(), Reason :: term()) ->
ok | term().
-spec create_tables() -> 'ok' | {'aborted', any()}.
create_tables() ->
create_tables([?TABLE]).
create_tables([]) ->
ok;
create_tables([{Table, Attributes} | Tables]) ->
case mnesia:create_table(Table, Attributes) of
{atomic, ok} -> create_tables(Tables);
{aborted, {already_exists, Table}} -> create_tables(Tables);
Err -> Err
end.
table_definitions() ->
{Name, Attributes} = ?TABLE,
[{Name, [?TABLE_MATCH | Attributes]}].
-spec start_link(group_name(), atom(), any(), txn_fun()) ->
rabbit_types:ok_pid_or_error().
start_link(GroupName, Module, Args, TxnFun) ->
gen_server2:start_link(?MODULE, [GroupName, Module, Args, TxnFun],
[{spawn_opt, [{fullsweep_after, 0}]}]).
-spec leave(pid()) -> 'ok'.
leave(Server) ->
gen_server2:cast(Server, leave).
-spec broadcast(pid(), any()) -> 'ok'.
broadcast(Server, Msg) -> broadcast(Server, Msg, 0).
broadcast(Server, Msg, SizeHint) ->
gen_server2:cast(Server, {broadcast, Msg, SizeHint}).
-spec confirmed_broadcast(pid(), any()) -> 'ok'.
confirmed_broadcast(Server, Msg) ->
gen_server2:call(Server, {confirmed_broadcast, Msg}, infinity).
-spec info(pid()) -> rabbit_types:infos().
info(Server) ->
gen_server2:call(Server, info, infinity).
-spec validate_members(pid(), [pid()]) -> 'ok'.
validate_members(Server, Members) ->
gen_server2:cast(Server, {validate_members, Members}).
-spec forget_group(group_name()) -> 'ok'.
forget_group(GroupName) ->
{atomic, ok} = mnesia:sync_transaction(
fun () ->
mnesia:delete({?GROUP_TABLE, GroupName})
end),
ok.
init([GroupName, Module, Args, TxnFun]) ->
put(process_name, {?MODULE, GroupName}),
Self = make_member(GroupName),
gen_server2:cast(self(), join),
{ok, #state { self = Self,
left = {Self, undefined},
right = {Self, undefined},
group_name = GroupName,
module = Module,
view = undefined,
pub_count = -1,
members_state = undefined,
callback_args = Args,
confirms = queue:new(),
broadcast_buffer = [],
broadcast_buffer_sz = 0,
broadcast_timer = undefined,
force_gc_timer = undefined,
txn_executor = TxnFun,
shutting_down = false }}.
handle_call({confirmed_broadcast, _Msg}, _From,
State = #state { shutting_down = {true, _} }) ->
reply(shutting_down, State);
handle_call({confirmed_broadcast, _Msg}, _From,
State = #state { members_state = undefined }) ->
reply(not_joined, State);
handle_call({confirmed_broadcast, Msg}, _From,
State = #state { self = Self,
right = {Self, undefined},
module = Module,
callback_args = Args }) ->
handle_callback_result({Module:handle_msg(Args, get_pid(Self), Msg),
ok, State});
handle_call({confirmed_broadcast, Msg}, From, State) ->
{Result, State1 = #state { pub_count = PubCount, confirms = Confirms }} =
internal_broadcast(Msg, 0, State),
Confirms1 = queue:in({PubCount, From}, Confirms),
handle_callback_result({Result, flush_broadcast_buffer(
State1 #state { confirms = Confirms1 })});
handle_call(info, _From,
State = #state { members_state = undefined }) ->
reply(not_joined, State);
handle_call(info, _From, State = #state { group_name = GroupName,
module = Module,
view = View }) ->
reply([{group_name, GroupName},
{module, Module},
{group_members, get_pids(alive_view_members(View))}], State);
handle_call({add_on_right, _NewMember}, _From,
State = #state { members_state = undefined }) ->
reply(not_ready, State);
handle_call({add_on_right, NewMember}, _From,
State = #state { self = Self,
group_name = GroupName,
members_state = MembersState,
txn_executor = TxnFun }) ->
try
Group = record_new_member_in_group(
NewMember, Self, GroupName, TxnFun),
View1 = group_to_view(check_membership(Self, Group)),
MembersState1 = remove_erased_members(MembersState, View1),
ok = send_right(NewMember, View1,
{catchup, Self, prepare_members_state(MembersState1)}),
{Result, State1} = change_view(View1, State #state {
members_state = MembersState1 }),
handle_callback_result({Result, {ok, Group}, State1})
catch
lost_membership ->
{stop, shutdown, State}
end.
%% add_on_right causes a catchup to be sent immediately from the left,
%% so we can never see this from the left neighbour. However, it's
%% possible for the right neighbour to send us a check_neighbours
%% immediately before that. We can't possibly handle it, but if we're
%% in this state we know a catchup is coming imminently anyway. So
%% just ignore it.
handle_cast({?TAG, _ReqVer, check_neighbours},
State = #state { members_state = undefined }) ->
noreply(State);
handle_cast({?TAG, ReqVer, Msg},
State = #state { view = View,
self = Self,
members_state = MembersState,
group_name = GroupName }) ->
try
{Result, State1} =
case needs_view_update(ReqVer, View) of
true ->
View1 = group_to_view(
check_membership(Self,
dirty_read_group(GroupName))),
MemberState1 = remove_erased_members(MembersState, View1),
change_view(View1, State #state {
members_state = MemberState1 });
false -> {ok, State}
end,
handle_callback_result(
if_callback_success(
Result, fun handle_msg_true/3, fun handle_msg_false/3, Msg, State1))
catch
lost_membership ->
{stop, shutdown, State}
end;
handle_cast({broadcast, _Msg, _SizeHint},
State = #state { shutting_down = {true, _} }) ->
noreply(State);
handle_cast({broadcast, _Msg, _SizeHint},
State = #state { members_state = undefined }) ->
noreply(State);
handle_cast({broadcast, Msg, _SizeHint},
State = #state { self = Self,
right = {Self, undefined},
module = Module,
callback_args = Args }) ->
handle_callback_result({Module:handle_msg(Args, get_pid(Self), Msg),
State});
handle_cast({broadcast, Msg, SizeHint}, State) ->
{Result, State1} = internal_broadcast(Msg, SizeHint, State),
handle_callback_result({Result, maybe_flush_broadcast_buffer(State1)});
handle_cast(join, State = #state { self = Self,
group_name = GroupName,
members_state = undefined,
module = Module,
callback_args = Args,
txn_executor = TxnFun }) ->
try
View = join_group(Self, GroupName, TxnFun),
MembersState =
case alive_view_members(View) of
[Self] -> blank_member_state();
_ -> undefined
end,
State1 = check_neighbours(State #state { view = View,
members_state = MembersState }),
handle_callback_result(
{Module:joined(Args, get_pids(all_known_members(View))), State1})
catch
lost_membership ->
{stop, shutdown, State}
end;
handle_cast({validate_members, OldMembers},
State = #state { view = View,
module = Module,
callback_args = Args }) ->
NewMembers = get_pids(all_known_members(View)),
Births = NewMembers -- OldMembers,
Deaths = OldMembers -- NewMembers,
case {Births, Deaths} of
{[], []} -> noreply(State);
_ -> Result = Module:members_changed(Args, Births, Deaths),
handle_callback_result({Result, State})
end;
handle_cast(leave, State) ->
{stop, normal, State}.
handle_info(force_gc, State) ->
garbage_collect(),
noreply(State #state { force_gc_timer = undefined });
handle_info(flush, State) ->
noreply(
flush_broadcast_buffer(State #state { broadcast_timer = undefined }));
handle_info(timeout, State) ->
noreply(flush_broadcast_buffer(State));
handle_info({'DOWN', _MRef, process, _Pid, _Reason},
State = #state { shutting_down =
{true, {shutdown, ring_shutdown}} }) ->
noreply(State);
handle_info({'DOWN', MRef, process, _Pid, Reason},
State = #state { self = Self,
left = Left,
right = Right,
group_name = GroupName,
confirms = Confirms,
txn_executor = TxnFun }) ->
try
check_membership(GroupName),
Member = case {Left, Right} of
{{Member1, MRef}, _} -> Member1;
{_, {Member1, MRef}} -> Member1;
_ -> undefined
end,
case {Member, Reason} of
{undefined, _} ->
noreply(State);
{_, {shutdown, ring_shutdown}} ->
noreply(State);
_ ->
%% In the event of a partial partition we could see another member
%% go down and then remove them from Mnesia. While they can
%% recover from this they'd have to restart the queue - not
%% ideal. So let's sleep here briefly just in case this was caused
%% by a partial partition; in which case by the time we record the
%% member death in Mnesia we will probably be in a full
%% partition and will not be assassinating another member.
timer:sleep(100),
View1 = group_to_view(record_dead_member_in_group(Self,
Member, GroupName, TxnFun, true)),
handle_callback_result(
case alive_view_members(View1) of
[Self] -> maybe_erase_aliases(
State #state {
members_state = blank_member_state(),
confirms = purge_confirms(Confirms) },
View1);
_ -> change_view(View1, State)
end)
end
catch
lost_membership ->
{stop, shutdown, State}
end;
handle_info(_, State) ->
%% Discard any unexpected messages, such as late replies from neighbour_call/2
%% TODO: For #gm_group{} related info messages, it could be worthwhile to
%% change_view/2, as this might reflect an alteration in the gm group, meaning
%% we now need to update our state. see rabbitmq-server#914.
noreply(State).
terminate(Reason, #state { module = Module, callback_args = Args }) ->
Module:handle_terminate(Args, Reason).
code_change(_OldVsn, State, _Extra) ->
{ok, State}.
prioritise_info(flush, _Len, _State) ->
1;
%% DOWN messages should not overtake initial catchups; if they do we
%% will receive a DOWN we do not know what to do with.
prioritise_info({'DOWN', _MRef, process, _Pid, _Reason}, _Len,
#state { members_state = undefined }) ->
0;
%% We should not prioritise DOWN messages from our left since
%% otherwise the DOWN can overtake any last activity from the left,
%% causing that activity to be lost.
prioritise_info({'DOWN', _MRef, process, LeftPid, _Reason}, _Len,
#state { left = {{_LeftVer, LeftPid}, _MRef2} }) ->
0;
%% But prioritise all other DOWNs - we want to make sure we are not
%% sending activity into the void for too long because our right is
%% down but we don't know it.
prioritise_info({'DOWN', _MRef, process, _Pid, _Reason}, _Len, _State) ->
1;
prioritise_info(_, _Len, _State) ->
0.
handle_msg(check_neighbours, State) ->
%% no-op - it's already been done by the calling handle_cast
{ok, State};
handle_msg({catchup, Left, MembersStateLeft},
State = #state { self = Self,
left = {Left, _MRefL},
right = {Right, _MRefR},
view = View,
members_state = undefined }) ->
ok = send_right(Right, View, {catchup, Self, MembersStateLeft}),
MembersStateLeft1 = build_members_state(MembersStateLeft),
{ok, State #state { members_state = MembersStateLeft1 }};
handle_msg({catchup, Left, MembersStateLeft},
State = #state { self = Self,
left = {Left, _MRefL},
view = View,
members_state = MembersState })
when MembersState =/= undefined ->
MembersStateLeft1 = build_members_state(MembersStateLeft),
AllMembers = lists:usort(maps:keys(MembersState) ++
maps:keys(MembersStateLeft1)),
{MembersState1, Activity} =
lists:foldl(
fun (Id, MembersStateActivity) ->
#member { pending_ack = PALeft, last_ack = LA } =
find_member_or_blank(Id, MembersStateLeft1),
with_member_acc(
fun (#member { pending_ack = PA } = Member, Activity1) ->
case is_member_alias(Id, Self, View) of
true ->
{_AcksInFlight, Pubs, _PA1} =
find_prefix_common_suffix(PALeft, PA),
{Member #member { last_ack = LA },
activity_cons(Id, pubs_from_queue(Pubs),
[], Activity1)};
false ->
{Acks, _Common, Pubs} =
find_prefix_common_suffix(PA, PALeft),
{Member,
activity_cons(Id, pubs_from_queue(Pubs),
acks_from_queue(Acks),
Activity1)}
end
end, Id, MembersStateActivity)
end, {MembersState, activity_nil()}, AllMembers),
handle_msg({activity, Left, activity_finalise(Activity)},
State #state { members_state = MembersState1 });
handle_msg({catchup, _NotLeft, _MembersState}, State) ->
{ok, State};
handle_msg({activity, Left, Activity},
State = #state { self = Self,
group_name = GroupName,
left = {Left, _MRefL},
view = View,
members_state = MembersState,
confirms = Confirms })
when MembersState =/= undefined ->
try
%% If we have to stop, do it asap so we avoid any ack confirmation
%% Membership must be checked again by erase_members_in_group, as the
%% node can be marked as dead on the meanwhile
check_membership(GroupName),
{MembersState1, {Confirms1, Activity1}} =
calculate_activity(MembersState, Confirms, Activity, Self, View),
State1 = State #state { members_state = MembersState1,
confirms = Confirms1 },
Activity3 = activity_finalise(Activity1),
ok = maybe_send_activity(Activity3, State1),
{Result, State2} = maybe_erase_aliases(State1, View),
if_callback_success(
Result, fun activity_true/3, fun activity_false/3, Activity3, State2)
catch
lost_membership ->
{{stop, shutdown}, State}
end;
handle_msg({activity, _NotLeft, _Activity}, State) ->
{ok, State}.
noreply(State) ->
{noreply, ensure_timers(State), flush_timeout(State)}.
reply(Reply, State) ->
{reply, Reply, ensure_timers(State), flush_timeout(State)}.
ensure_timers(State) ->
ensure_force_gc_timer(ensure_broadcast_timer(State)).
flush_timeout(#state{broadcast_buffer = []}) -> infinity;
flush_timeout(_) -> 0.
ensure_force_gc_timer(State = #state { force_gc_timer = TRef })
when is_reference(TRef) ->
State;
ensure_force_gc_timer(State = #state { force_gc_timer = undefined }) ->
TRef = erlang:send_after(?FORCE_GC_TIMER, self(), force_gc),
State #state { force_gc_timer = TRef }.
ensure_broadcast_timer(State = #state { broadcast_buffer = [],
broadcast_timer = undefined }) ->
State;
ensure_broadcast_timer(State = #state { broadcast_buffer = [],
broadcast_timer = TRef }) ->
_ = erlang:cancel_timer(TRef),
State #state { broadcast_timer = undefined };
ensure_broadcast_timer(State = #state { broadcast_timer = undefined }) ->
TRef = erlang:send_after(?BROADCAST_TIMER, self(), flush),
State #state { broadcast_timer = TRef };
ensure_broadcast_timer(State) ->
State.
internal_broadcast(Msg, SizeHint,
State = #state { self = Self,
pub_count = PubCount,
module = Module,
callback_args = Args,
broadcast_buffer = Buffer,
broadcast_buffer_sz = BufferSize }) ->
PubCount1 = PubCount + 1,
{Module:handle_msg(Args, get_pid(Self), Msg),
State #state { pub_count = PubCount1,
broadcast_buffer = [{PubCount1, Msg} | Buffer],
broadcast_buffer_sz = BufferSize + SizeHint}}.
%% The Erlang distribution mechanism has an interesting quirk - it
%% will kill the VM cold with "Absurdly large distribution output data
%% buffer" if you attempt to send a message which serialises out to
%% more than 2^31 bytes in size. It's therefore a very good idea to
%% make sure that we don't exceed that size!
%%
%% Now, we could figure out the size of messages as they come in using
%% size(term_to_binary(Msg)) or similar. The trouble is, that requires
%% us to serialise the message only to throw the serialised form
%% away. Hard to believe that's a sensible thing to do. So instead we
%% accept a size hint from the application, via broadcast/3. This size
%% hint can be the size of anything in the message which we expect
%% could be large, and we just ignore the size of any small bits of
%% the message term. Therefore MAX_BUFFER_SIZE is set somewhat
%% conservatively at 100MB - but the buffer is only to allow us to
%% buffer tiny messages anyway, so 100MB is plenty.
maybe_flush_broadcast_buffer(State = #state{broadcast_buffer_sz = Size}) ->
case Size > ?MAX_BUFFER_SIZE of
true -> flush_broadcast_buffer(State);
false -> State
end.
flush_broadcast_buffer(State = #state { broadcast_buffer = [] }) ->
State;
flush_broadcast_buffer(State = #state { self = Self,
members_state = MembersState,
broadcast_buffer = Buffer,
pub_count = PubCount }) ->
[{PubCount, _Msg}|_] = Buffer, %% ASSERTION match on PubCount
Pubs = lists:reverse(Buffer),
Activity = activity_cons(Self, Pubs, [], activity_nil()),
ok = maybe_send_activity(activity_finalise(Activity), State),
MembersState1 = with_member(
fun (Member = #member { pending_ack = PA }) ->
PA1 = queue:join(PA, queue:from_list(Pubs)),
Member #member { pending_ack = PA1,
last_pub = PubCount }
end, Self, MembersState),
State #state { members_state = MembersState1,
broadcast_buffer = [],
broadcast_buffer_sz = 0 }.
%% ---------------------------------------------------------------------------
%% View construction and inspection
%% ---------------------------------------------------------------------------
needs_view_update(ReqVer, {Ver, _View}) -> Ver < ReqVer.
view_version({Ver, _View}) -> Ver.
is_member_alive({dead, _Member}) -> false;
is_member_alive(_) -> true.
is_member_alias(Self, Self, _View) ->
true;
is_member_alias(Member, Self, View) ->
?SETS:is_element(Member,
((fetch_view_member(Self, View)) #view_member.aliases)).
dead_member_id({dead, Member}) -> Member.
store_view_member(VMember = #view_member { id = Id }, {Ver, View}) ->
{Ver, maps:put(Id, VMember, View)}.
with_view_member(Fun, View, Id) ->
store_view_member(Fun(fetch_view_member(Id, View)), View).
fetch_view_member(Id, {_Ver, View}) -> maps:get(Id, View).
find_view_member(Id, {_Ver, View}) -> maps:find(Id, View).
blank_view(Ver) -> {Ver, maps:new()}.
alive_view_members({_Ver, View}) -> maps:keys(View).
all_known_members({_Ver, View}) ->
maps:fold(
fun (Member, #view_member { aliases = Aliases }, Acc) ->
?SETS:to_list(Aliases) ++ [Member | Acc]
end, [], View).
group_to_view(#gm_group { members = Members, version = Ver }) ->
Alive = lists:filter(fun is_member_alive/1, Members),
[_|_] = Alive, %% ASSERTION - can't have all dead members
add_aliases(link_view(Alive ++ Alive ++ Alive, blank_view(Ver)), Members).
link_view([Left, Middle, Right | Rest], View) ->
case find_view_member(Middle, View) of
error ->
link_view(
[Middle, Right | Rest],
store_view_member(#view_member { id = Middle,
aliases = ?SETS:new(),
left = Left,
right = Right }, View));
{ok, _} ->
View
end;
link_view(_, View) ->
View.
add_aliases(View, Members) ->
Members1 = ensure_alive_suffix(Members),
{EmptyDeadSet, View1} =
lists:foldl(
fun (Member, {DeadAcc, ViewAcc}) ->
case is_member_alive(Member) of
true ->
{?SETS:new(),
with_view_member(
fun (VMember =
#view_member { aliases = Aliases }) ->
VMember #view_member {
aliases = ?SETS:union(Aliases, DeadAcc) }
end, ViewAcc, Member)};
false ->
{?SETS:add_element(dead_member_id(Member), DeadAcc),
ViewAcc}
end
end, {?SETS:new(), View}, Members1),
0 = ?SETS:size(EmptyDeadSet), %% ASSERTION
View1.
ensure_alive_suffix(Members) ->
queue:to_list(ensure_alive_suffix1(queue:from_list(Members))).
ensure_alive_suffix1(MembersQ) ->
{{value, Member}, MembersQ1} = queue:out_r(MembersQ),
case is_member_alive(Member) of
true -> MembersQ;
false -> ensure_alive_suffix1(queue:in_r(Member, MembersQ1))
end.
%% ---------------------------------------------------------------------------
%% View modification
%% ---------------------------------------------------------------------------
join_group(Self, GroupName, TxnFun) ->
join_group(Self, GroupName, dirty_read_group(GroupName), TxnFun).
join_group(Self, GroupName, {error, not_found}, TxnFun) ->
join_group(Self, GroupName,
prune_or_create_group(Self, GroupName, TxnFun), TxnFun);
join_group(Self, _GroupName, #gm_group { members = [Self] } = Group, _TxnFun) ->
group_to_view(Group);
join_group(Self, GroupName, #gm_group { members = Members } = Group, TxnFun) ->
case lists:member(Self, Members) of
true ->
group_to_view(Group);
false ->
case lists:filter(fun is_member_alive/1, Members) of
[] ->
join_group(Self, GroupName,
prune_or_create_group(Self, GroupName, TxnFun),
TxnFun);
Alive ->
Left = lists:nth(rand:uniform(length(Alive)), Alive),
Handler =
fun () ->
join_group(
Self, GroupName,
record_dead_member_in_group(Self,
Left, GroupName, TxnFun, false),
TxnFun)
end,
try
case neighbour_call(Left, {add_on_right, Self}) of
{ok, Group1} -> group_to_view(Group1);
not_ready -> join_group(Self, GroupName, TxnFun)
end
catch
exit:{R, _}
when R =:= noproc; R =:= normal; R =:= shutdown ->
Handler();
exit:{{R, _}, _}
when R =:= nodedown; R =:= shutdown ->
Handler()
end
end
end.
dirty_read_group(GroupName) ->
case mnesia:dirty_read(?GROUP_TABLE, GroupName) of
[] -> {error, not_found};
[Group] -> Group
end.
read_group(GroupName) ->
case mnesia:read({?GROUP_TABLE, GroupName}) of
[] -> {error, not_found};
[Group] -> Group
end.
write_group(Group) -> mnesia:write(?GROUP_TABLE, Group, write), Group.
prune_or_create_group(Self, GroupName, TxnFun) ->
TxnFun(
fun () ->
GroupNew = #gm_group { name = GroupName,
members = [Self],
version = get_version(Self) },
case read_group(GroupName) of
{error, not_found} ->
write_group(GroupNew);
Group = #gm_group { members = Members } ->
case lists:any(fun is_member_alive/1, Members) of
true -> Group;
false -> write_group(GroupNew)
end
end
end).
record_dead_member_in_group(Self, Member, GroupName, TxnFun, Verify) ->
Fun =
fun () ->
try
Group = #gm_group { members = Members, version = Ver } =
case Verify of
true ->
check_membership(Self, read_group(GroupName));
false ->
check_group(read_group(GroupName))
end,
case lists:splitwith(
fun (Member1) -> Member1 =/= Member end, Members) of
{_Members1, []} -> %% not found - already recorded dead
Group;
{Members1, [Member | Members2]} ->
Members3 = Members1 ++ [{dead, Member} | Members2],
write_group(Group #gm_group { members = Members3,
version = Ver + 1 })
end
catch
lost_membership ->
%% The transaction must not be abruptly crashed, but
%% leave the gen_server to stop normally
{error, lost_membership}
end
end,
handle_lost_membership_in_txn(TxnFun, Fun).
handle_lost_membership_in_txn(TxnFun, Fun) ->
case TxnFun(Fun) of
{error, lost_membership = T} ->
throw(T);
Any ->
Any
end.
record_new_member_in_group(NewMember, Left, GroupName, TxnFun) ->
Fun =
fun () ->
try
Group = #gm_group { members = Members, version = Ver } =
check_membership(Left, read_group(GroupName)),
case lists:member(NewMember, Members) of
true ->
%% This avois duplicates during partial partitions,
%% as inconsistent views might happen during them
rabbit_log:warning("(~p) GM avoiding duplicate of ~p",
[self(), NewMember]),
Group;
false ->
{Prefix, [Left | Suffix]} =
lists:splitwith(fun (M) -> M =/= Left end, Members),
write_group(Group #gm_group {
members = Prefix ++ [Left, NewMember | Suffix],
version = Ver + 1 })
end
catch
lost_membership ->
%% The transaction must not be abruptly crashed, but
%% leave the gen_server to stop normally
{error, lost_membership}
end
end,
handle_lost_membership_in_txn(TxnFun, Fun).
erase_members_in_group(Self, Members, GroupName, TxnFun) ->
DeadMembers = [{dead, Id} || Id <- Members],
Fun =
fun () ->
try
Group = #gm_group { members = [_|_] = Members1, version = Ver } =
check_membership(Self, read_group(GroupName)),
case Members1 -- DeadMembers of
Members1 -> Group;
Members2 -> write_group(
Group #gm_group { members = Members2,
version = Ver + 1 })
end
catch
lost_membership ->
%% The transaction must not be abruptly crashed, but
%% leave the gen_server to stop normally
{error, lost_membership}
end
end,
handle_lost_membership_in_txn(TxnFun, Fun).
maybe_erase_aliases(State = #state { self = Self,
group_name = GroupName,
members_state = MembersState,
txn_executor = TxnFun }, View) ->
#view_member { aliases = Aliases } = fetch_view_member(Self, View),
{Erasable, MembersState1}
= ?SETS:fold(
fun (Id, {ErasableAcc, MembersStateAcc} = Acc) ->
#member { last_pub = LP, last_ack = LA } =
find_member_or_blank(Id, MembersState),
case can_erase_view_member(Self, Id, LA, LP) of
true -> {[Id | ErasableAcc],
erase_member(Id, MembersStateAcc)};
false -> Acc
end
end, {[], MembersState}, Aliases),
View1 = case Erasable of
[] -> View;
_ -> group_to_view(
erase_members_in_group(Self, Erasable, GroupName, TxnFun))
end,
change_view(View1, State #state { members_state = MembersState1 }).
can_erase_view_member(Self, Self, _LA, _LP) -> false;
can_erase_view_member(_Self, _Id, N, N) -> true;
can_erase_view_member(_Self, _Id, _LA, _LP) -> false.
neighbour_cast(N, Msg) -> ?INSTR_MOD:cast(get_pid(N), Msg).
neighbour_call(N, Msg) -> ?INSTR_MOD:call(get_pid(N), Msg, infinity).
%% ---------------------------------------------------------------------------
%% View monitoring and maintenance
%% ---------------------------------------------------------------------------
ensure_neighbour(_Ver, Self, {Self, undefined}, Self) ->
{Self, undefined};
ensure_neighbour(Ver, Self, {Self, undefined}, RealNeighbour) ->
ok = neighbour_cast(RealNeighbour, {?TAG, Ver, check_neighbours}),
{RealNeighbour, maybe_monitor(RealNeighbour, Self)};
ensure_neighbour(_Ver, _Self, {RealNeighbour, MRef}, RealNeighbour) ->
{RealNeighbour, MRef};
ensure_neighbour(Ver, Self, {RealNeighbour, MRef}, Neighbour) ->
true = ?INSTR_MOD:demonitor(MRef),
Msg = {?TAG, Ver, check_neighbours},
ok = neighbour_cast(RealNeighbour, Msg),
ok = case Neighbour of
Self -> ok;
_ -> neighbour_cast(Neighbour, Msg)
end,
{Neighbour, maybe_monitor(Neighbour, Self)}.
maybe_monitor( Self, Self) -> undefined;
maybe_monitor(Other, _Self) -> ?INSTR_MOD:monitor(get_pid(Other)).
check_neighbours(State = #state { self = Self,
left = Left,
right = Right,
view = View,
broadcast_buffer = Buffer }) ->
#view_member { left = VLeft, right = VRight }
= fetch_view_member(Self, View),
Ver = view_version(View),
Left1 = ensure_neighbour(Ver, Self, Left, VLeft),
Right1 = ensure_neighbour(Ver, Self, Right, VRight),
Buffer1 = case Right1 of
{Self, undefined} -> [];
_ -> Buffer
end,
State1 = State #state { left = Left1, right = Right1,
broadcast_buffer = Buffer1 },
ok = maybe_send_catchup(Right, State1),
State1.
maybe_send_catchup(Right, #state { right = Right }) ->
ok;
maybe_send_catchup(_Right, #state { self = Self,
right = {Self, undefined} }) ->
ok;
maybe_send_catchup(_Right, #state { members_state = undefined }) ->
ok;
maybe_send_catchup(_Right, #state { self = Self,
right = {Right, _MRef},
view = View,
members_state = MembersState }) ->
send_right(Right, View,
{catchup, Self, prepare_members_state(MembersState)}).
%% ---------------------------------------------------------------------------
%% Catch_up delta detection
%% ---------------------------------------------------------------------------
find_prefix_common_suffix(A, B) ->
{Prefix, A1} = find_prefix(A, B, queue:new()),
{Common, Suffix} = find_common(A1, B, queue:new()),
{Prefix, Common, Suffix}.
%% Returns the elements of A that occur before the first element of B,
%% plus the remainder of A.
find_prefix(A, B, Prefix) ->
case {queue:out(A), queue:out(B)} of
{{{value, Val}, _A1}, {{value, Val}, _B1}} ->
{Prefix, A};
{{empty, A1}, {{value, _A}, _B1}} ->
{Prefix, A1};
{{{value, {NumA, _MsgA} = Val}, A1},
{{value, {NumB, _MsgB}}, _B1}} when NumA < NumB ->
find_prefix(A1, B, queue:in(Val, Prefix));
{_, {empty, _B1}} ->
{A, Prefix} %% Prefix well be empty here
end.
%% A should be a prefix of B. Returns the commonality plus the
%% remainder of B.
find_common(A, B, Common) ->
case {queue:out(A), queue:out(B)} of
{{{value, Val}, A1}, {{value, Val}, B1}} ->
find_common(A1, B1, queue:in(Val, Common));
{{empty, _A}, _} ->
{Common, B};
%% Drop value from B.
%% Match value to avoid infinite loop, since {empty, B} = queue:out(B).
{_, {{value, _}, B1}} ->
find_common(A, B1, Common);
%% Drop value from A. Empty A should be matched by second close.
{{{value, _}, A1}, _} ->
find_common(A1, B, Common)
end.
%% ---------------------------------------------------------------------------
%% Members helpers
%% ---------------------------------------------------------------------------
with_member(Fun, Id, MembersState) ->
store_member(
Id, Fun(find_member_or_blank(Id, MembersState)), MembersState).
with_member_acc(Fun, Id, {MembersState, Acc}) ->
{MemberState, Acc1} = Fun(find_member_or_blank(Id, MembersState), Acc),
{store_member(Id, MemberState, MembersState), Acc1}.
find_member_or_blank(Id, MembersState) ->
case maps:find(Id, MembersState) of
{ok, Result} -> Result;
error -> blank_member()
end.
erase_member(Id, MembersState) -> maps:remove(Id, MembersState).
blank_member() ->
#member { pending_ack = queue:new(), last_pub = -1, last_ack = -1 }.
blank_member_state() -> maps:new().
store_member(Id, MemberState, MembersState) ->
maps:put(Id, MemberState, MembersState).
prepare_members_state(MembersState) -> maps:to_list(MembersState).
build_members_state(MembersStateList) -> maps:from_list(MembersStateList).
make_member(GroupName) ->
{case dirty_read_group(GroupName) of
#gm_group { version = Version } -> Version;
{error, not_found} -> ?VERSION_START
end, self()}.
remove_erased_members(MembersState, View) ->
lists:foldl(fun (Id, MembersState1) ->
store_member(Id, find_member_or_blank(Id, MembersState),
MembersState1)
end, blank_member_state(), all_known_members(View)).
get_version({Version, _Pid}) -> Version.
get_pid({_Version, Pid}) -> Pid.
get_pids(Ids) -> [Pid || {_Version, Pid} <- Ids].
%% ---------------------------------------------------------------------------
%% Activity assembly
%% ---------------------------------------------------------------------------
activity_nil() -> queue:new().
activity_cons( _Id, [], [], Tail) -> Tail;
activity_cons(Sender, Pubs, Acks, Tail) -> queue:in({Sender, Pubs, Acks}, Tail).
activity_finalise(Activity) -> queue:to_list(Activity).
maybe_send_activity([], _State) ->
ok;
maybe_send_activity(Activity, #state { self = Self,
right = {Right, _MRefR},
view = View }) ->
send_right(Right, View, {activity, Self, Activity}).
send_right(Right, View, Msg) ->
ok = neighbour_cast(Right, {?TAG, view_version(View), Msg}).
calculate_activity(MembersState, Confirms, Activity, Self, View) ->
lists:foldl(
fun ({Id, Pubs, Acks}, MembersStateConfirmsActivity) ->
with_member_acc(
fun (Member = #member { pending_ack = PA,
last_pub = LP,
last_ack = LA },
{Confirms2, Activity2}) ->
case is_member_alias(Id, Self, View) of
true ->
{ToAck, PA1} =
find_common(queue_from_pubs(Pubs), PA,
queue:new()),
LA1 = last_ack(Acks, LA),
AckNums = acks_from_queue(ToAck),
Confirms3 = maybe_confirm(
Self, Id, Confirms2, AckNums),
{Member #member { pending_ack = PA1,
last_ack = LA1 },
{Confirms3,
activity_cons(
Id, [], AckNums, Activity2)}};
false ->
PA1 = apply_acks(Acks, join_pubs(PA, Pubs)),
LA1 = last_ack(Acks, LA),
LP1 = last_pub(Pubs, LP),
{Member #member { pending_ack = PA1,
last_pub = LP1,
last_ack = LA1 },
{Confirms2,
activity_cons(Id, Pubs, Acks, Activity2)}}
end
end, Id, MembersStateConfirmsActivity)
end, {MembersState, {Confirms, activity_nil()}}, Activity).
callback(Args, Module, Activity) ->
Result =
lists:foldl(
fun ({Id, Pubs, _Acks}, {Args1, Module1, ok}) ->
lists:foldl(fun ({_PubNum, Pub}, Acc = {Args2, Module2, ok}) ->
case Module2:handle_msg(
Args2, get_pid(Id), Pub) of
ok ->
Acc;
{become, Module3, Args3} ->
{Args3, Module3, ok};
{stop, _Reason} = Error ->
Error
end;
(_, Error = {stop, _Reason}) ->
Error
end, {Args1, Module1, ok}, Pubs);
(_, Error = {stop, _Reason}) ->
Error
end, {Args, Module, ok}, Activity),
case Result of
{Args, Module, ok} -> ok;
{Args1, Module1, ok} -> {become, Module1, Args1};
{stop, _Reason} = Error -> Error
end.
change_view(View, State = #state { view = View0,
module = Module,
callback_args = Args }) ->
OldMembers = all_known_members(View0),
NewMembers = all_known_members(View),
Births = NewMembers -- OldMembers,
Deaths = OldMembers -- NewMembers,
Result = case {Births, Deaths} of
{[], []} -> ok;
_ -> Module:members_changed(
Args, get_pids(Births), get_pids(Deaths))
end,
{Result, check_neighbours(State #state { view = View })}.
handle_callback_result({Result, State}) ->
if_callback_success(
Result, fun no_reply_true/3, fun no_reply_false/3, undefined, State);
handle_callback_result({Result, Reply, State}) ->
if_callback_success(
Result, fun reply_true/3, fun reply_false/3, Reply, State).
no_reply_true (_Result, _Undefined, State) -> noreply(State).
no_reply_false({stop, Reason}, _Undefined, State) -> {stop, Reason, State}.
reply_true (_Result, Reply, State) -> reply(Reply, State).
reply_false({stop, Reason}, Reply, State) -> {stop, Reason, Reply, State}.
handle_msg_true (_Result, Msg, State) -> handle_msg(Msg, State).
handle_msg_false(Result, _Msg, State) -> {Result, State}.
activity_true(_Result, Activity, State = #state { module = Module,
callback_args = Args }) ->
{callback(Args, Module, Activity), State}.
activity_false(Result, _Activity, State) ->
{Result, State}.
if_callback_success(Result, True, False, Arg, State) ->
{NewResult, NewState} = maybe_stop(Result, State),
if_callback_success1(NewResult, True, False, Arg, NewState).
if_callback_success1(ok, True, _False, Arg, State) ->
True(ok, Arg, State);
if_callback_success1(
{become, Module, Args} = Result, True, _False, Arg, State) ->
True(Result, Arg, State #state { module = Module,
callback_args = Args });
if_callback_success1({stop, _Reason} = Result, _True, False, Arg, State) ->
False(Result, Arg, State).
maybe_stop({stop, Reason}, #state{ shutting_down = false } = State) ->
ShuttingDown = {true, Reason},
case has_pending_messages(State) of
true -> {ok, State #state{ shutting_down = ShuttingDown }};
false -> {{stop, Reason}, State #state{ shutting_down = ShuttingDown }}
end;
maybe_stop(Result, #state{ shutting_down = false } = State) ->
{Result, State};
maybe_stop(Result, #state{ shutting_down = {true, Reason} } = State) ->
case has_pending_messages(State) of
true -> {Result, State};
false -> {{stop, Reason}, State}
end.
has_pending_messages(#state{ broadcast_buffer = Buffer })
when Buffer =/= [] ->
true;
has_pending_messages(#state{ members_state = MembersState }) ->
MembersWithPubAckMismatches = maps:filter(fun(_Id, #member{last_pub = LP, last_ack = LA}) ->
LP =/= LA
end, MembersState),
0 =/= maps:size(MembersWithPubAckMismatches).
maybe_confirm(_Self, _Id, Confirms, []) ->
Confirms;
maybe_confirm(Self, Self, Confirms, [PubNum | PubNums]) ->
case queue:out(Confirms) of
{empty, _Confirms} ->
Confirms;
{{value, {PubNum, From}}, Confirms1} ->
gen_server2:reply(From, ok),
maybe_confirm(Self, Self, Confirms1, PubNums);
{{value, {PubNum1, _From}}, _Confirms} when PubNum1 > PubNum ->
maybe_confirm(Self, Self, Confirms, PubNums)
end;
maybe_confirm(_Self, _Id, Confirms, _PubNums) ->
Confirms.
purge_confirms(Confirms) ->
_ = [gen_server2:reply(From, ok) || {_PubNum, From} <- queue:to_list(Confirms)],
queue:new().
%% ---------------------------------------------------------------------------
%% Msg transformation
%% ---------------------------------------------------------------------------
acks_from_queue(Q) -> [PubNum || {PubNum, _Msg} <- queue:to_list(Q)].
pubs_from_queue(Q) -> queue:to_list(Q).
queue_from_pubs(Pubs) -> queue:from_list(Pubs).
apply_acks( [], Pubs) -> Pubs;
apply_acks(List, Pubs) -> {_, Pubs1} = queue:split(length(List), Pubs),
Pubs1.
join_pubs(Q, []) -> Q;
join_pubs(Q, Pubs) -> queue:join(Q, queue_from_pubs(Pubs)).
last_ack( [], LA) -> LA;
last_ack(List, LA) -> LA1 = lists:last(List),
true = LA1 > LA, %% ASSERTION
LA1.
last_pub( [], LP) -> LP;
last_pub(List, LP) -> {PubNum, _Msg} = lists:last(List),
true = PubNum > LP, %% ASSERTION
PubNum.
%% ---------------------------------------------------------------------------
%% Uninstrumented versions
call(Pid, Msg, Timeout) -> gen_server2:call(Pid, Msg, Timeout).
cast(Pid, Msg) -> gen_server2:cast(Pid, Msg).
monitor(Pid) -> erlang:monitor(process, Pid).
demonitor(MRef) -> erlang:demonitor(MRef).
check_membership(Self, #gm_group{members = M} = Group) ->
case lists:member(Self, M) of
true ->
Group;
false ->
throw(lost_membership)
end;
check_membership(_Self, {error, not_found}) ->
throw(lost_membership).
check_membership(GroupName) ->
case dirty_read_group(GroupName) of
#gm_group{members = M} ->
case lists:keymember(self(), 2, M) of
true ->
ok;
false ->
throw(lost_membership)
end;
{error, not_found} ->
throw(lost_membership)
end.
check_group({error, not_found}) ->
throw(lost_membership);
check_group(Any) ->
Any.
故障节点消息同步
当闭环中某个节点故障,需要故障节点上游节点经信息同步到故障节点的下游节点,需要决定哪个节点上的信息是最新的,RabbitMQ在每个节点设置view变量,
如A->B->C->D->E变为A->E,假设A、B、C、D、E最初都有view值x。B、C、D同时退出时,A获悉B的退出消息,view值更新为x+1;E获悉D的退出消息,view值更新为x+2;然后A监控C,获悉C退出,view值更新为x+3;A继续获取下游节点E,向E发送自身状态,E的view值小于A,所以E先更新自身view(view值将更新为x+3),然后处理消息。(这是一种可能的顺序,真实的顺序按照节点收到退出消息顺序确定。)
GM的实现可直接查看源码,有很好的代码注释:
https://github.com/rabbitmq/rabbitmq-server/blob/stable/src/gm.erl
Master提升
GM保证了集群中slave节点挂掉时,消息不会丢失。当master节点挂掉时,最老的slave节点将被提升为master,此时channel发给原master的消息可能并没有通过原master的GM广播出来,所以该场景下需要额外的机制来确保消息不丢失。
RabbitMQ通过以下方法解决该问题:channel进程在收到生产者消息后,将消息发送给所有的队列进程,队列进程缓存从channel收到的消息(amqqueue缓存队列)。当队列进程从gm收到该消息后,将消息入BQ队列,并删除缓存消息。当master挂掉时,新的master通过对比gm缓存和amqqueue缓存,获取上述channel已发出、原master未通过gm转发的消息。新master此时会将未确认(consume ack)的消费消息退回BQ队列(requeue),然后将上面获取的原master未转发消息入BQ队列(同时在gm广播进行同步)。
对于消费消息,channel只用与master通信,master将消费信息在集群中同步。当master挂掉时,新提升的master将未确认的消费消息退回BQ队列(由于新master不知道消费者是否ack,所以只能将消息退回队列);已确认的消费消息由新master继续在集群中同步,不用退回队列。
该机制确保了RabbitMQ的可靠交付(at-least-once delivery)。
该部分代码在slave中:https://github.com/rabbitmq/rabbitmq-server/blob/stable/src/rabbit_mirror_queue_slave.erl#L551