出租车轨迹数据地图匹配
地图匹配--千万量级出租车轨迹数据
- 时空轨迹数据的研究点
- 数据样例
- 数据展示
- 地图匹配
- 地图匹配准备
- 地图匹配Python实现
- 地图匹配C#实现
时空轨迹数据是带有时间和空间信息的序列数据,数据获取成本低,覆盖范围广,且拥有时态特性,既可以进行微观个体活动模式的研究,也可以进行宏观活动系统的城市空间结构的研究。今天将分享一套出租车轨迹数据,该数据包含北京市2008年一周内10000+辆出租车、10分钟采样频率、1千万条以上的轨迹。
去看原文
时空轨迹数据的研究点
时空轨迹数据可进行城市动态景观分析,城市公共空间组织与规划,城市人口分布,城市交通可达性、土地利用与交通需求的依赖关系、城市路网脆弱性等研究。同时,利用配有GPS的浮动车数据(Floating Car Data)不仅能够动态追踪移动车辆的连续轨迹,而且由于浮动车辆的运动受限于路网,也能够动态感知城市道路的路网交通状态、拥堵状况、十字路口等重要交通节点的车流量状况,分析出租车轨迹的时空规律等。
例如,轨迹数据可用于提取人流、信息流的方向与强度,对于区域空间结构研究提供了新的视角。轨迹数据也可提取人口分布空间集聚动态规律,有助于交通问题的发现与解决,促进交通分析的精确化、科学化。
数据样例
1,2008-02-02 15:36:08,116.51172,39.92123
1,2008-02-02 15:46:08,116.51135,39.93883
1,2008-02-02 15:46:08,116.51135,39.93883
1,2008-02-02 15:56:08,116.51627,39.91034
1,2008-02-02 16:06:08,116.47186,39.91248
主要包含车辆ID,时间戳,经纬度等信息。
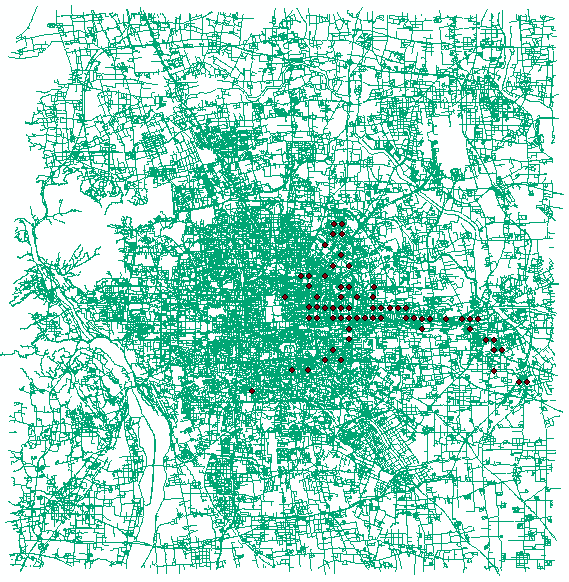
数据展示
路网及轨迹点展示:
一天的某量车辆轨迹动态展示:
某辆出租车多天轨迹2D平面展示:

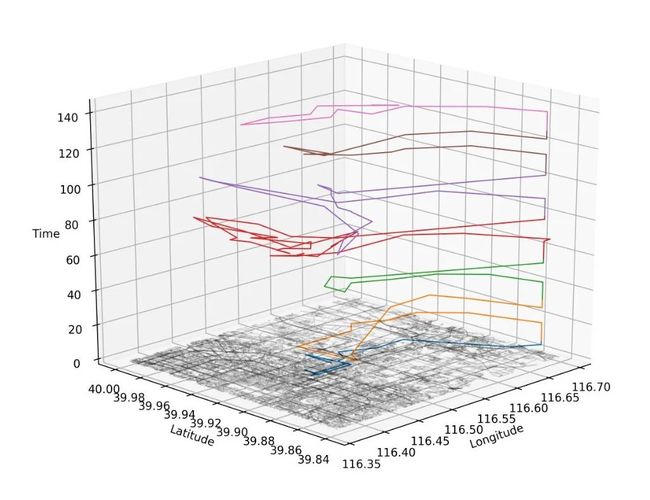
某辆出租车多天轨迹3维展示:
地图匹配
选择部分轨迹序列,由于GPS的误差,出租车轨迹点通常不在路网中;然而,由于出租车是受路网约束的,因此需要进行地图匹配,即将在路网外的GPS点移动到路网上(不是简单的移动到最近的路段上),并且考虑轨迹的连贯性。
原始轨迹数据是不在路网上的:
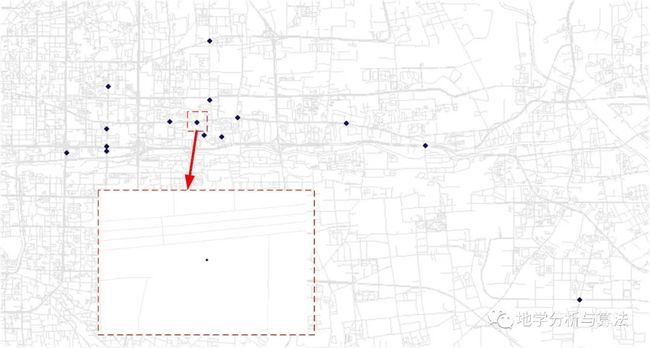
匹配后的点一定是在路网上的。GPS点将在考虑前后轨迹点的同时,找到一个路段上最优的的一个候选点进行匹配(从下图可以看出并非直接移动到最近的路段上):

地图匹配进行轨迹还原:

地图匹配准备
进行时空轨迹数据分析时,地图匹配是一项数据预处理部分重要的工作。此处地图匹配的算法可参考:如何把车辆轨迹数据匹配到路网?此匹配方法适用低频、高频轨迹数据地图匹配,并且考虑匹配轨迹的连贯性,而不是简单的将点移动到最近的路段上。此处给出地图匹配的Python实现和C#实现。
在进行地图匹配之前,首选需要准备路网数据(可从OSM下载),并对轨迹数据进行划分成不同的轨迹段。
以下是路网数据的预处理:
- 路段筛选。从Open Street Map上下载的道路路网不仅包含车辆行驶道路,还包括自行车道、人行道、步行道等非机动道路。因此需要将这部分非机动车道路从路网中移除。
- 路段划分。对于低等级的道路,需要在线的交点处进行划分,将路段分割成更小的单元。即在该交点处能够向左、右行驶,即真实道路十字路口的转向拓扑关系。即下图红色框内需要进行线分割。

- 投影变换。从OSM下载的路网数据通常是WGS84地理坐标系,需要将其从WGS84地理坐标系投影为投影(平面)坐标系 ,以方便距离计算。
- 生成网络数据集。提取交叉路口。
- 空间连接并筛选。生产的网络数据集中存在junctions文件,进行空间连接,即将路网线数据和交叉路口连接起来。对于空间连接数大于2的,则用junctions进行打断。然后去掉空间连接数等于1的,即保证一条路段仅有两个junctions,即最小单元的路段的两端为交叉路口。
- 生成拓扑表。根据空间连接结果生成路段两端点的坐标,长度等信息。然后生成拓扑表。
对于出租车轨迹数据,需要进行以下预处理:
- 按车辆ID对数据进行划分,即同一辆车同一天的数据放在一起,并按时间戳字段进行排序;
- 同车辆ID同天的数据进行轨迹段划分。因为出租车存在数据丢失或者一些其他原因,一辆出租车的轨迹数据并不是按采样间隔连续有数据,会存在很长一段时间段没有数据,因此需要进行轨迹段划分。对排好序的数据相邻两个轨迹点进行时间戳做差求时间间隔,若时间间隔大于给定的阈值,则认为是新的一段轨迹,并设置新的轨迹段ID。
处理好路网数据和轨迹数据,便可以进行地图匹配。
地图匹配Python实现
# -*- coding: utf-8 -*-
# @Author: 武辛
# @Email: [email protected]
# @Note: 如有疑问,可加微信"wxid-3ccc"
def main():
trajectory_data_rootdir = "轨迹数据根路径"
network_path = "BJRoadNet/Beijing_Polyline.shp" # 路网shp文件路径
bufferDis = 50 # 缓冲距离
taix_id = 1 # 出租车辆id
prex = "point_taxi_gps_20xx_by_id" # 保存文件的前缀
# 加载轨迹数据以及基础数据
datas = readTrajectory(trajectory_data_rootdir + "taxi_log_20xx_by_id/%s.txt" % (str(taix_id)))
network = Network.loadNetwork("Beijing_NetworkLink", "NetworkLink")
ArcPy_Util.bindFeatureLayer(network, network_path)
isStop(datas, network_path, bufferDis) # 判断为静止的时段,就不考虑该轨迹点
datas = datas[datas["Day"] == 2]
datas.reset_index(drop = True)
# 匹配部分代码
candinate_points = match(network, datas, bufferDis)
# 匹配结果整理,获取轨迹线、点信息
print("Start to get the matched info...")
route_polylines, route_points = getPolyline_Point_Info(candinate_points, network)
# 匹配前结果存为shp文件
points = [ArcPy_Util.lnglatToXY(coords["LNG"], coords["LAT"], ArcPy_Util.get_spatial_reference(network_path)) for index, coords in datas.iterrows() if not coords["Is_Stop"]]
ArcPy_Util.save_points(points, ArcPy_Util.get_spatial_reference(network_path), "Matched_Taxi_Data/%s_%s.shp" % (prex, str(taix_id)))
# 匹配后结果存为shp文件
ArcPy_Util.save_points(route_points, ArcPy_Util.get_spatial_reference(network_path), "Matched_Taxi_Data/Mathched_%s_%s.shp" % (prex, str(taix_id)))
ArcPy_Util.save_polylines(route_polylines, "Matched_Taxi_Data/%s_%s.shp" % ("polyline", str(taix_id)))
地图匹配C#实现
针对地图匹配的Python实现,采用了采样频率为5-10秒的轨迹数据进行了测试,路网规模的量级大概为(8094节点,18486条边),如下图,匹配6065个节点的时间大概需要3900+秒,可以看出这个匹配效率还是比较慢。
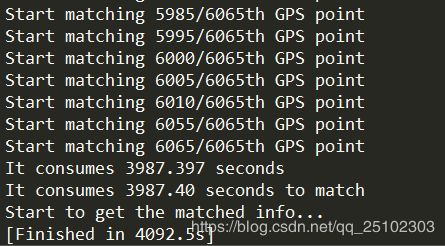
因此,本文采用C语言对该代码进行重写,并进行测试(同样采样频率数据,相同路网情况下)。如下图,可以看出,匹配100个点大概需要3秒,效率相对来说可以接受。

以下是某段轨迹的匹配结果:

原文有源码,更多内容,请关注地学分析与算法。
