如何用sunrise连接KMR(Kuka Mobile Robot)
如何用sunrise连接KMR(Kuka Mobile Robot)、iiwa
iiwa是库卡的一款7轴协作机器人产品,如图所示。sunrise是库卡的一款协作机器人iiwa专用的上位机软件,可用于对iiwa进行编程以及配置相关硬件设备(如PLC、抓手设备)或软件包(如抓手设备的软件包)。
 iiwa机器人搭载在一款AGV移动小车上,这款AGV小车和iiwa合称为KMR(kuka mobile robot)即库卡移动机器人,如下图所示。本博客sunrise连接的对象就是它,掌握了sunrise连接这个复杂的机器人之后,对于sunrise连接单独的iiwa机器人也就得心应手了。
iiwa机器人搭载在一款AGV移动小车上,这款AGV小车和iiwa合称为KMR(kuka mobile robot)即库卡移动机器人,如下图所示。本博客sunrise连接的对象就是它,掌握了sunrise连接这个复杂的机器人之后,对于sunrise连接单独的iiwa机器人也就得心应手了。
一、sunrise、WorkVisual的下载和安装
workvisual在这里起到的只是辅助作用,workvisual本来是用于库卡工业机器人的,sunrise因为不能配置总线和IO映射(IO映射这个词听的高大上,其实指的就是配置外部设备IO口和机器人自带的IO口的一一对应关系,让他们对应的IO口建立联系),所以采用workvisual来完成这部分功能,但是控制iiwa机器人运动主要还是靠sunrise。
sunrise和workvisual的下载
这两个软件我目前并不知道在哪里下载,如果有读到本博客的朋友可以在评论区告知一下,这里我就直接放百度云的下载链接了,这里还有必要强调一下,软件对应的版本很重要,这是搞应用或者开发最坑爹的地方,很烦,但是也没办法,下面的两个是相对应的版本。
sunrise的版本是1.16.1.9:
链接:https://pan.baidu.com/s/1Q-URawmPL4cEngW0O70Rng
提取码:lyux
workvisual的版本是5.0:
链接:https://pan.baidu.com/s/1YURr9lrq4djWn2hWEjHIiQ
提取码:dwat
1.1sunrise的安装
sunrise先傻瓜式安装完毕,如图所示。

1.2workvisual的安装
workvisual也先傻瓜式安装完毕,如图所示

1.3workvisual与sunrise建立联系
这一步是让workvisual与sunrise建立联系,只需要对一些文件进行操作即可,下面两个文件夹下载一下,同样是百度云链接:
链接:https://pan.baidu.com/s/1htNJHWOtzz7yvt1mcgZ8qw
提取码:h9kr
(1)解压之后进入到0000306891;02;KUKA Sunrise.Mobility Patch WoV 5.0.5文件夹,可以看到有如下这些文件。
将这些东东都复制一下,粘贴到C:\Program Files (x86)\KUKA\WorkVisual 5.0路径下,覆盖之前的文件。
(2)第二个文件夹WorkVisual AddOn中有一个叫sunrise的库卡附加包文件,我们如下操作。
打开workvisual,等待一会,弹出的对话框可以先不管,叉掉,然后选择如图所示的extras-option package management

弹出的对话框中,选择右边窗口左上方的“+”,在弹出的对话框中浏览文件夹中的sunrise文件,点击open即可,如图。
 在这个附加包安装完成之后,会显示附加包的版本,如图所示。这个版本和我们安装的sunrise的版本不一样,这篇博客不会用到这个软件,但是至于后期会不会有影响,还不能得知,这个地方留下一个疑问,以后来解答
在这个附加包安装完成之后,会显示附加包的版本,如图所示。这个版本和我们安装的sunrise的版本不一样,这篇博客不会用到这个软件,但是至于后期会不会有影响,还不能得知,这个地方留下一个疑问,以后来解答

重启一下软件即可完成安装。
1.4sunrise安装软件包
因为机器人的功能比较复杂,涉及到安全以及和各个设备的连接,比如外部电脑,夹爪等外部设备等,因此需要安装软件包,软件包需要去一些地方下载,具体在哪里下载笔者还是不太清楚,后续再完善。现在先提供一些软件包进行安装,通过这些软件包的名字我们可以大概猜到软件包的功能,比如有的是安全方面的,有的是增速控制的,以下是这些软件包的百度云盘链接,放在一个名为opinion的文件夹下:
链接:https://pan.baidu.com/s/1rYb0i9srFVwcjNbGu2N1DA
提取码:bxcc
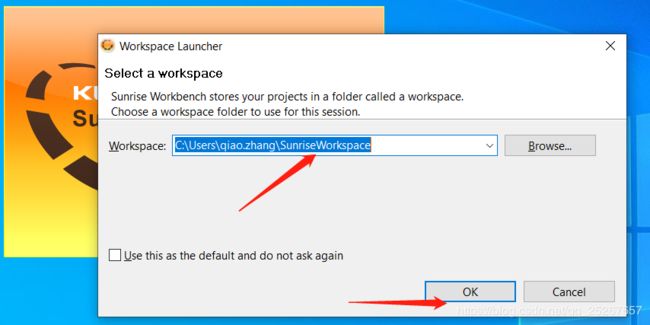
双击桌面sunrise图标之后,出现的下面这个对话框,是让你设置sunrise的项目存放路径,这个自己设置即可,但是不要出现中文路径,点击OK即可打开sunrise。
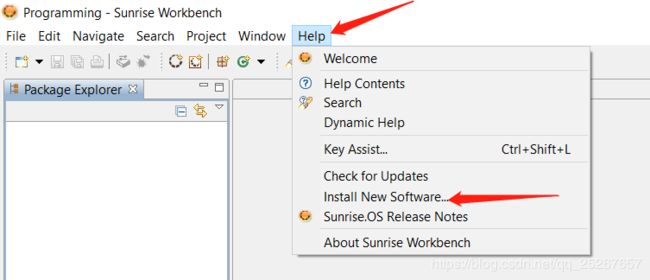
打开之后,点击上方的help-install new software
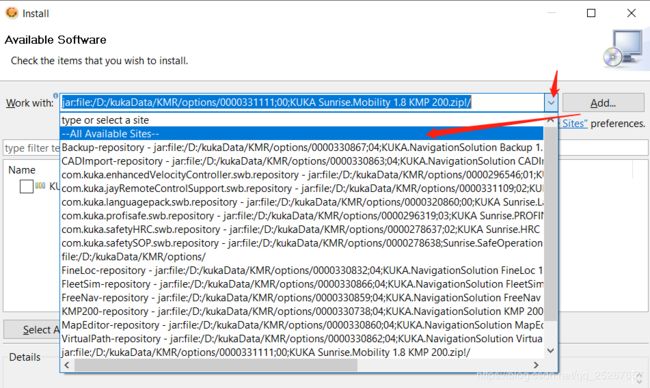
 弹出的对话框如下图所示,同时打开option文件夹,将里面的sunrise软件包一个一个的拖到弹出的对话框中,注意,不要一下子全部选中了拖,这样是拖不了的,要一个一个地拖进去
弹出的对话框如下图所示,同时打开option文件夹,将里面的sunrise软件包一个一个的拖到弹出的对话框中,注意,不要一下子全部选中了拖,这样是拖不了的,要一个一个地拖进去
 全部拖进去之后,在上方的进度条选择all available sites,然后选择下方的select all,再点击next,软件包就开始安装了,安装完毕之后点击finish,软件会提示你重启软件,重启即可。
全部拖进去之后,在上方的进度条选择all available sites,然后选择下方的select all,再点击next,软件包就开始安装了,安装完毕之后点击finish,软件会提示你重启软件,重启即可。

二、sunrise中项目的创建及站点配置
sunrise中要编写程序传给机器人,必须先新建项目,再进行站点配置(站点配置同样写的高大上,听起来很懵逼,但是你可以理解成为将一些外部的软件包下载导入到机器人硬件系统中去,就跟总线一样的,为什么称之为总?线?初学者一听说肯定一脸懵逼,专业词汇嘛,一开始听说都是这样的),项目的创建和站点配置都是准备工作,下面开始说步骤。
2.1新建sunrise项目
点击file-new-sunrise project,会弹出一个对话框,对话框中会有两个选项,一个是让你创建新的项目,另一个是load project from controller(指的是把机器人控制器中已经存在的项目导入到sunrise,因为机器人控制器一下子只准存在一个项目,是一个项目,不是程序,程序可以多个,项目只准一个。当然,从机器人控制器导入项目到电脑是需要你的电脑和机器人先建立IP连接的)。


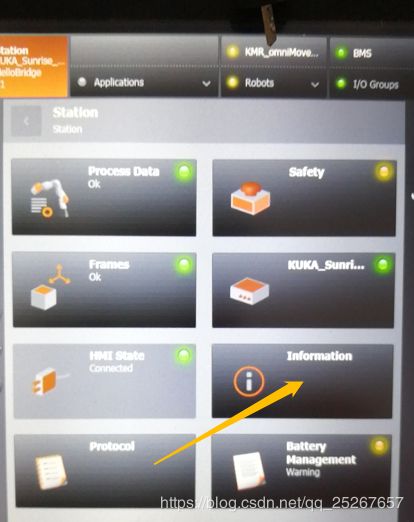
上述弹出的对话框我们选择“创建新的项目”,IP地址我们填写机器人控制柜的IP,机器人控制柜的IP可以在示教器上查到,示教器开机之后的菜单界面的information点进去就可以看到机器人控制器的IP为172.31.1.10,同时我们可以看到对应的sunrise版本和我们安装的是一致的。


输入IP之后点击next,弹出的对话框输入项目的名字,自己命名即可,之后继续点击next,接下来弹出的对话框需要输入机器人的型号,如图所示。这个型号一般在机器人的铭牌上可以看到,iiwa七轴机器人有一个铭牌,下面的AGV小车一样有一个铭牌。
如下图所示,根据两个铭牌,综合起来选择蓝色条所在的机器人型号模板,其中“200”指的是这个移动机器人最大的载重是200kg,点击next,

下一步弹出的对话框,是让我们选择法兰的型号,法兰盘的型号我们可以根据法兰盘上的标签看到,如下图所示。

根据法兰盘的型号,我们选择如下图所示的法兰盘

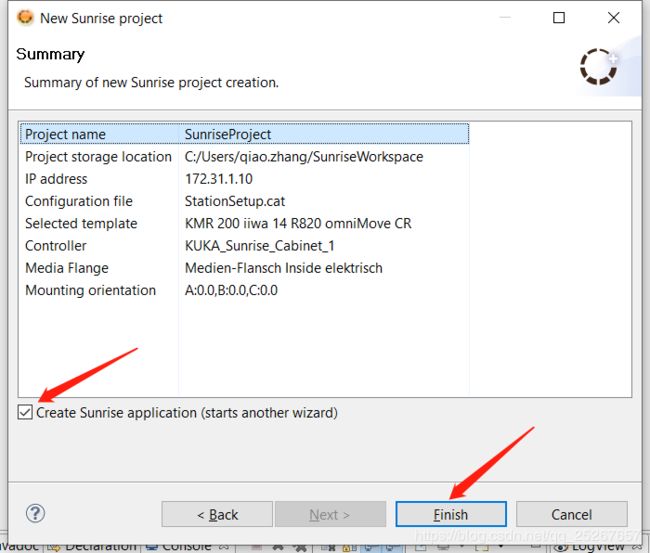
选择好之后点击next,弹出如下图所示的对话框,对话框的信息即我们刚才设置的一些选项,左下角的create new application勾选了之后会自动在这个项目之下创建应用,点击finish。
点击了之后,sunrise会先卡一下,然后弹出一个对话框,如下图所示,选择箭头所指的roboticsAPI application,点击next

弹出的对话框中,可以给你的application命名,点击finish。

点击之后sunrise又会卡一下,然后就直接到了主页面。从页面可以看到左边有一个项目,就是我们创建的项目,展开折叠,可以看到在src/application/里面有一个.java的文件,这个文件已经在右边显示,是一个java程序文件,我们可以在里面写程序,然后传输到iiwa机器人,控制机器人完成相应的运动动作。

2.2sunrise的站点配置
站点配置就是把,首先需要在1.4中导入的sunrise软件包导入到机器人硬件系统,所以首先需要将机器人和电脑进行网络连接,可以用网线,也可以连接机器人发出的WiFi,然后将机器人的静态IP设置成和机器人的IP在同一网段下,如下图所示。
首先在示教器主页上点击information,可以看到机器人的IP为172.31.1.10,若要电脑和机器人的IP在同一网段下,则将IP最后的那个10改成1-254中的任何一个别的数即可(对于IP的说明,可以参考这本书籍,图解TCP/IP,链接:https://pan.baidu.com/s/1OoUrgGtSNd4C6IK82binQQ
提取码:fq40)

电脑先连接机器人
打开控制面板–网络与共享中心–更改适配器设置–右键连接上的那个网络图标(我这里是连的WiFi,所以选第四个)–双击那个带有IPv4的选项–更改机器人的静态IP,如图所示

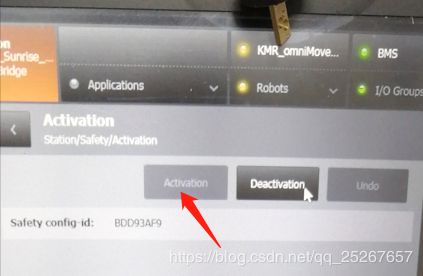
激活机器人的安全模式,在机器人主页点击safety–activation–activation,默认密码是argus


打开sunrise,双击stationsetup.cat,sunrise会卡一下,然后弹出一个界面,如下图所示,需要按照下面箭头所指的四个依次进行设置。


首先是模板,展开之后发现这些都是我们之前选择的机械臂和AGV的型号,不用做任何操作

其次是本次的核心,也就是software,安装sunrise的软件包,自己勾选需要的,后面有错误提示的就不选择,本次我就能选的都选。

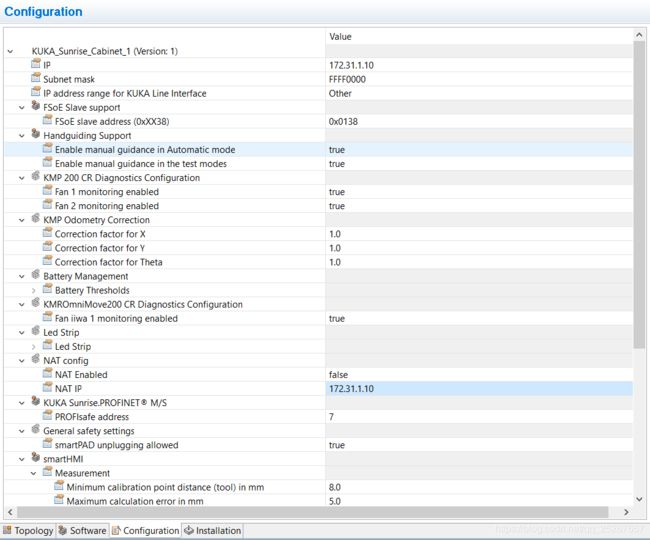
configuration页面也暂时不用管,有些IP可能没有填写,没有填写的就先统一和机器人IP保持一致即可。
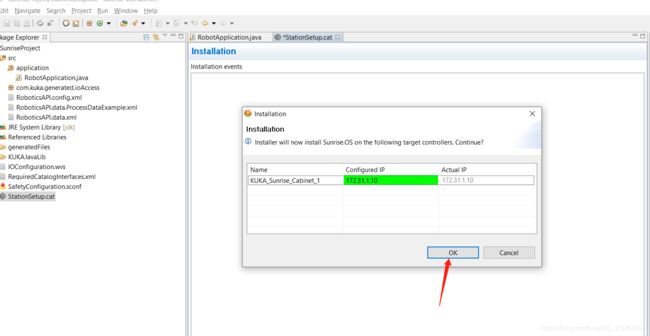
最后在installation页面进行安装,点击install

安装的时候会让你确认IP,点击OK就会开始安装,

安装完毕之后机器人会重启一次,重启完成后激活安全配置,前面说过,在机器人主页点击safety–activation–activation,默认密码是argus
站点配置完毕。
2.3sunrise程序的同步、运行和导出
sunrise程序的同步、运行
在application界面已有的程序中添加下面的程序语句,输出一行文字

@Inject
private ITaskLogger log;//ITaskLogger是类,log是对象
log.info("hello,my first program!");//log是对象,info是方法
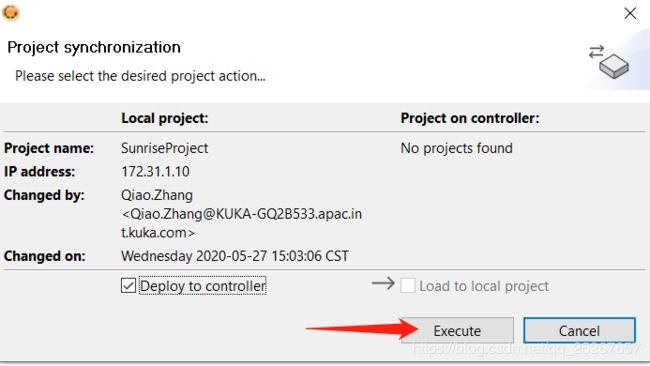
然后点击上面菜单栏的同步按钮,中间的弹框点击execute,程序就会同步到机器人。

如图所示,示教器上面点击application可以看到我们新建的这个程序文件robotapplication,选择这个程序文件,(若是选择了之后,示教器使能按键没反应,则可以看看安全配置是否需要再次激活,前面说过,在机器人主页点击safety–activation–activation,默认密码是argus)

按住使能案件,点击运行

如图所示,程序就成功运行,显示了我们在程序中输入的那一行文字

sunrise程序的导出
若是机器人上存在程序文件,想导出到sunrise,可以采取如下步骤,这个步骤在2.1中最开始说过。
点击file-new-sunrise project,会弹出一个对话框,对话框中会有两个选项,一个是让你创建新的项目,另一个是load project from controller(指的就是把机器人控制器中已经存在的项目导入到sunrise)。
这个页面我们需要输入正确的机器人的IP地址,然后点击next就可以导出了。

三、结语
目前新手一枚,很多地方描述不太专业,也请大家批评指正,另外这个由于涉及到KUKA公司的产品,所以请大家不要广泛传播,谢谢。