0. SSD原理一步一步阐释


SSD这种检测方法咋感觉有点像FPN,特征金字塔,在较底层的特征有着较高的分辨率,在较高的特征有着较低的分辨率,它在高分辨率和低分便率都进行class predict和box predict。让我们首先了解一下anchor box是个什么东西。
我们知道,proposal的提取是每个像素点都会提取一遍anchor,也就是prior的区域,那么问题来了:
- 所谓每一个像素点,是所有的像素点吗?如果不是第一个提取proposal的像素点是哪个?
- 如果size是原尺寸的一半,也就是scale 0.5,那么它的不同ratio得到的具体size怎么计算?
上面两个问题中,首先是proposal开始的第一个像素点开始的位置,这里其实应该是从最大的scale的中心位置开始,比如,下面的anchor中,最大的scale是1,也就是原图,那么它的中心位置就是所有像素点的开始。那么问题又来了,这是第一个像素点,那最后一个像素点呢?为什么要从scale为1的中心位置开始作为一个像素点进行proposal的提取呢?
import mxnet as mx
from mxnet import nd
from mxnet.contrib.ndarray import MultiBoxPrior
from mxnet.gluon import nn
from mxnet import gluon
n = 40
w = 40
h = 40
x = nd.random_uniform(shape=(1, 3, w, h))
y = MultiBoxPrior(x, sizes=[0.5, 0.25, 0.1], ratios=[1, 2, 0.5])
# 我们的到了8000个proposal, 如果是每一个像素点都提取9个anchor,那么应该是14400个anchor,但是实际上只有8000个
# 这是为毛呢
print(y.shape)
# 按照每行每列的anchor来shape一下, 这5怎么来的呢,我草
boxes = y.reshape((w, h, -1, 4))
print(boxes.shape)
(1, 8000, 4)
(40, 40, 5, 4)
按道理,这里如果说每一个像素都提取9个anchor,那么应该是会产生14400个anchor,但是这个MultiBoxPrior却只产生了8000个anchor。为什么会这样呢?在教程里面有这么一句话,来仔细理解一下:
The first i boxes are generated from sizes[i], ratios[0] if i≤n
otherwise sizes[0], ratios[i-n].
其中n指的是n中sizes,这句话的意思是,我们有n个sizes,m个ratios,那么产生的boxes并不是我们想象的n*m,而是n+m-1:
i = 1, sizes[0], ratios[0]
i = 2, sizes[1], ratios[0]
i = 3, sizes[2], ratios[0]
i = 4, sizes[0], ratios[1]
i = 5, sizes[0], ratios[2]
为什么是1-5?因为3+3-1=5, 为什么ratios[0]的时候对应这个3个sizes,而ratios[1]和ratios[2]都只对应了sizes[0]呢??
我们看看具体的数值:
i = 1, sizes[0]:0.5, ratios[0]:1
i = 2, sizes[1]:0.25, ratios[0]:1
i = 3, sizes[2]:0.1, ratios[0]:1
i = 4, sizes[0]:0.5, ratios[1]:2
i = 5, sizes[0]:0.5, ratios[2]:0.5
我们算是看明白了:
- 这样做基于样本中大部分物体是正方形的,这样从0.5-0.1,确保都有比例为1的anchor;
- 在均匀尺度也就是0.5这个size上,不大不小,覆盖了2, 0.5,1等极端比例,这就意味着,在均匀物体上,尽量把多个尺度检测出来。
- 再仔细看看,为什么size在四分之一和十分之的时候只有1的ratios呢?这是因为这个时候基本上都是小物体了,有两个原因这么做,首先第一个是样本中小物体都是方形的,第二个是小物体没有必要去追求非主流尺度,因为十分之一非常非常小了,非主流尺度反而会不准确。
这样一来,生成8000个anchor也就不足为奇了。但是问题又来了。按照这个理论,我改一下sizes和ratios的顺序,生成的框不就是不同了么?那这么做还有什么意义呢?这个MultiBoxPrior里面处理的逻辑究竟是怎么样的呢?
import matplotlib.pyplot as plt
def box_to_rect(box, color, linewidth=3):
"""convert an anchor box to a matplotlib rectangle"""
box = box.asnumpy()
return plt.Rectangle(
(box[0], box[1]), (box[2]-box[0]), (box[3]-box[1]),
fill=False, edgecolor=color, linewidth=linewidth)
colors = ['blue', 'green', 'red', 'black', 'magenta']
plt.imshow(nd.ones((n, n, 3)).asnumpy())
anchors = boxes[20, 20, :, :]
for i in range(anchors.shape[0]):
plt.gca().add_patch(box_to_rect(anchors[i,:]*n, colors[i]))
plt.show()

从图上来看,更加清晰了,看到没,在最里面的十分之一的size里面,并没有1:2或者是2:1这样的ratios,所以跟上面的是一致的。但是我想不通,如果是增加1:2和2:1在小的size上,那么会有什么不同呢?为什么不加呢?(如果你想明白了这个问题,可以给我submit一个PR来让大家理解一下。)
1. SSD 构建一二三
带着一些疑问和不解,我们继续来进入最复杂的三个部分:
- 预测类别
- 预测boxes
- 降采样,以及SSD中独有的,在每层降采样中都预测类别和boxes,并把多层的结果融合到一起
# 这个类别预测网络,简直他妈的精简到想哭,简单到只有一层卷积,这个卷积的通道数
# 是anchor的个数乘以类别,anchor指的是每个像素点的个数,那么相当于是,
# 每个anchor都会生成一个类别
def class_predictor(num_anchors, num_classes):
return nn.Conv2D(num_anchors * (num_classes + 1), 3, padding=1)
cls_pred = class_predictor(5, 10)
cls_pred.initialize()
x = nd.zeros([2, 3, 20, 20])
print('class prediction: ', cls_pred(x).shape)
class prediction: (2, 55, 20, 20)
这个类别预测最终输出了55,因为anchor是5,类别是10,加一是因为加上了背景这个类别,那么很显然,这个class predictor就可以对输入的特征,得到的每一个anchor都预测一个类别了。这里的2是什么?batch_size吗?还有那里的卷积的stride为什么是3?
def box_predictor(num_anchors):
return nn.Conv2D(num_anchors * 4, 3, padding=1)
box_pred = box_predictor(10)
box_pred.initialize()
x = nd.zeros([2, 3, 20, 20])
print('box prediction: ', box_pred(x).shape)
box prediction: (2, 40, 20, 20)
def down_sample(num_filters):
out = nn.HybridSequential()
for _ in range(2):
out.add(nn.Conv2D(num_filters, 3, strides=1, padding=1))
out.add(nn.BatchNorm(in_channels=num_filters))
out.add(nn.Activation('relu'))
out.add(nn.MaxPool2D(2))
return out
blk = down_sample(10)
blk.initialize()
x = nd.zeros([2, 3, 20, 20])
print('before: ', x.shape, 'after: ', blk(x).shape)
before: (2, 3, 20, 20) after: (2, 10, 10, 10)
feat1 = nd.zeros((2, 8, 20, 20))
print('Feature map 1', feat1.shape)
cls_pred1 = class_predictor(5, 10)
cls_pred1.initialize()
y1 = cls_pred1(feat1)
print('Class prediction for feature map 1', y1.shape)
# down-sample
ds = down_sample(16)
ds.initialize()
feat2 = ds(feat1)
print('Feature map 2', feat2.shape)
cls_pred2 = class_predictor(3, 10)
cls_pred2.initialize()
y2 = cls_pred2(feat2)
print('Class prediction for feature map 2', y2.shape)
Feature map 1 (2, 8, 20, 20)
Class prediction for feature map 1 (2, 55, 20, 20)
Feature map 2 (2, 16, 10, 10)
Class prediction for feature map 2 (2, 33, 10, 10)
def flatten_prediction(pred):
return nd.flatten(nd.transpose(pred, axes=(0, 2, 3, 1)))
def concat_predictions(preds):
return nd.concat(*preds, dim=1)
flat_y1 = flatten_prediction(y1)
print('Flatten class prediction 1', flat_y1.shape)
flat_y2 = flatten_prediction(y2)
print('Flatten class prediction 2', flat_y2.shape)
print('Concat class predictions', concat_predictions([flat_y1, flat_y2]).shape)
Flatten class prediction 1 (2, 22000)
Flatten class prediction 2 (2, 3300)
Concat class predictions (2, 25300)
这里,将两层featuremap出来的class predictor的预测concat到一起,但是是falatten之后,在concat。这样的话,两层的特征出来之后,我每层特征都做class predict,得到的结果我concat到一起。
def body():
out = nn.HybridSequential()
for f in [16, 32, 64]:
out.add(down_sample(f))
return out
b_net = body()
b_net.initialize()
x = nd.zeros([2, 3, 256, 256])
print('body network: ', b_net(x).shape)
body network: (2, 64, 32, 32)
def toy_ssd_model(num_anchors, num_classes):
"""return SSD modules"""
downsamples = nn.Sequential()
class_preds = nn.Sequential()
box_preds = nn.Sequential()
downsamples.add(down_sample(128))
downsamples.add(down_sample(128))
downsamples.add(down_sample(128))
for scale in range(5):
class_preds.add(class_predictor(num_anchors, num_classes))
box_preds.add(box_predictor(num_anchors))
return body(), downsamples, class_preds, box_preds
print(toy_ssd_model(5, 2))
def toy_ssd_forward(x, body, downsamples, class_preds, box_preds, sizes, ratios):
# extract feature with the body network
x = body(x)
# for each scale, add anchors, box and class predictions,
# then compute the input to next scale
default_anchors = []
predicted_boxes = []
predicted_classes = []
for i in range(5):
default_anchors.append(MultiBoxPrior(x, sizes=sizes[i], ratios=ratios[i]))
predicted_boxes.append(flatten_prediction(box_preds[i](x)))
predicted_classes.append(flatten_prediction(class_preds[i](x)))
if i < 3:
x = downsamples[i](x)
elif i == 3:
# simply use the pooling layer
x = nd.Pooling(x, global_pool=True, pool_type='max', kernel=(4, 4))
return default_anchors, predicted_classes, predicted_boxes
class ToySSD(gluon.Block):
def __init__(self, num_classes, **kwargs):
super(ToySSD, self).__init__(**kwargs)
# anchor box sizes for 4 feature scales
self.anchor_sizes = [[.2, .272], [.37, .447], [.54, .619], [.71, .79], [.88, .961]]
# anchor box ratios for 4 feature scales
self.anchor_ratios = [[1, 2, .5]] * 5
self.num_classes = num_classes
with self.name_scope():
self.body, self.downsamples, self.class_preds, self.box_preds = toy_ssd_model(4, num_classes)
def forward(self, x):
default_anchors, predicted_classes, predicted_boxes = toy_ssd_forward(x, self.body, self.downsamples,
self.class_preds, self.box_preds, self.anchor_sizes, self.anchor_ratios)
# we want to concatenate anchors, class predictions, box predictions from different layers
anchors = concat_predictions(default_anchors)
box_preds = concat_predictions(predicted_boxes)
class_preds = concat_predictions(predicted_classes)
# it is better to have class predictions reshaped for softmax computation
class_preds = nd.reshape(class_preds, shape=(0, -1, self.num_classes + 1))
return anchors, class_preds, box_preds
net = ToySSD(5)
net.initialize()
x = nd.zeros((1, 3, 256, 256))
default_anchors, class_predictions, box_predictions = net(x)
print('Outputs:', 'anchors', default_anchors.shape, 'class prediction', class_predictions.shape, 'box prediction', box_predictions.shape)
Outputs: anchors (1, 5444, 4) class prediction (1, 5444, 6) box prediction (1, 21776)
2. 下载数据开始训练
我们这次用到的数据集是皮卡丘检测数据集,这个数据集只有1000张图片,已经做好了mxnet所需要的rec格式。如果你想要自己制作这种数据集,以便mxnet可以更好的导入,也没有问题。网上有很多制作检测数据集的教程,大家可以去搜索一下。
from mxnet.test_utils import download
import os.path as osp
def verified(file_path, sha1hash):
import hashlib
sha1 = hashlib.sha1()
with open(file_path, 'rb') as f:
while True:
data = f.read(1048576)
if not data:
break
sha1.update(data)
matched = sha1.hexdigest() == sha1hash
if not matched:
print('Found hash mismatch in file {}, possibly due to incomplete download.'.format(file_path))
return matched
url_format = 'https://apache-mxnet.s3-accelerate.amazonaws.com/gluon/dataset/pikachu/{}'
hashes = {'train.rec': 'e6bcb6ffba1ac04ff8a9b1115e650af56ee969c8',
'train.idx': 'dcf7318b2602c06428b9988470c731621716c393',
'val.rec': 'd6c33f799b4d058e82f2cb5bd9a976f69d72d520'}
for k, v in hashes.items():
fname = 'pikachu_' + k
target = osp.join('data', fname)
url = url_format.format(k)
if not osp.exists(target) or not verified(target, v):
print('Downloading', target, url)
download(url, fname=fname, dirname='data', overwrite=True)
文件下载以后我们就可以写迭代器来获取图片数据了。
import mxnet.image as image
data_shape = 256
batch_size = 32
def get_iterators(data_shape, batch_size):
class_names = ['pikachu']
num_class = len(class_names)
train_iter = image.ImageDetIter(
batch_size=batch_size,
data_shape=(3, data_shape, data_shape),
path_imgrec='./data/pikachu_train.rec',
path_imgidx='./data/pikachu_train.idx',
shuffle=True,
mean=True,
rand_crop=1,
min_object_covered=0.95,
max_attempts=200)
val_iter = image.ImageDetIter(
batch_size=batch_size,
data_shape=(3, data_shape, data_shape),
path_imgrec='./data/pikachu_val.rec',
shuffle=False,
mean=True)
return train_iter, val_iter, class_names, num_class
train_data, test_data, class_names, num_class = get_iterators(data_shape, batch_size)
batch = train_data.next()
print(batch)
让我们读取一张图片看看,长啥样:
import numpy as np
img = batch.data[0][0].asnumpy() # grab the first image, convert to numpy array
img = img.transpose((1, 2, 0)) # we want channel to be the last dimension
img += np.array([123, 117, 104])
img = img.astype(np.uint8) # use uint8 (0-255)
# draw bounding boxes on image
for label in batch.label[0][0].asnumpy():
if label[0] < 0:
break
print(label)
xmin, ymin, xmax, ymax = [int(x * data_shape) for x in label[1:5]]
rect = plt.Rectangle((xmin, ymin), xmax - xmin, ymax - ymin, fill=False, edgecolor=(1, 0, 0), linewidth=1)
plt.gca().add_patch(rect)
plt.imshow(img)
plt.show()

from mxnet.contrib.ndarray import MultiBoxTarget
def training_targets(default_anchors, class_predicts, labels):
class_predicts = nd.transpose(class_predicts, axes=(0, 2, 1))
z = MultiBoxTarget(*[default_anchors, labels, class_predicts])
box_target = z[0] # box offset target for (x, y, width, height)
box_mask = z[1] # mask is used to ignore box offsets we don't want to penalize, e.g. negative samples
cls_target = z[2] # cls_target is an array of labels for all anchors boxes
return box_target, box_mask, cls_target
class FocalLoss(gluon.loss.Loss):
def __init__(self, axis=-1, alpha=0.25, gamma=2, batch_axis=0, **kwargs):
super(FocalLoss, self).__init__(None, batch_axis, **kwargs)
self._axis = axis
self._alpha = alpha
self._gamma = gamma
def hybrid_forward(self, F, output, label):
output = F.softmax(output)
pt = F.pick(output, label, axis=self._axis, keepdims=True)
loss = -self._alpha * ((1 - pt) ** self._gamma) * F.log(pt)
return F.mean(loss, axis=self._batch_axis, exclude=True)
class SmoothL1Loss(gluon.loss.Loss):
def __init__(self, batch_axis=0, **kwargs):
super(SmoothL1Loss, self).__init__(None, batch_axis, **kwargs)
def hybrid_forward(self, F, output, label, mask):
loss = F.smooth_l1((output - label) * mask, scalar=1.0)
return F.mean(loss, self._batch_axis, exclude=True)
cls_loss = FocalLoss()
box_loss = SmoothL1Loss()
cls_metric = mx.metric.Accuracy()
box_metric = mx.metric.MAE()
ctx = mx.gpu() # it may takes too long to train using CPU
try:
_ = nd.zeros(1, ctx=ctx)
# pad label for cuda implementation
train_data.reshape(label_shape=(3, 5))
train_data = test_data.sync_label_shape(train_data)
except mx.base.MXNetError as err:
print('No GPU enabled, fall back to CPU, sit back and be patient...')
ctx = mx.cpu()
net = ToySSD(num_class)
net.initialize(mx.init.Xavier(magnitude=2), ctx=ctx)
net.collect_params().reset_ctx(ctx)
trainer = gluon.Trainer(net.collect_params(), 'sgd', {'learning_rate': 0.1, 'wd': 5e-4})
epochs = 150 # set larger to get better performance
log_interval = 20
from_scratch = False # set to True to train from scratch
if from_scratch:
start_epoch = 0
else:
import os
start_epoch = 148
pretrained = 'ssd_pretrained.params'
sha1 = 'fbb7d872d76355fff1790d864c2238decdb452bc'
url = 'https://apache-mxnet.s3-accelerate.amazonaws.com/gluon/models/ssd_pikachu-fbb7d872.params'
if not os.path.exists(pretrained):
print('Downloading', pretrained, url)
download(url, fname=pretrained, overwrite=True)
net.load_params(pretrained, ctx)
import time
from mxnet import autograd as ag
for epoch in range(start_epoch, epochs):
# reset iterator and tick
train_data.reset()
cls_metric.reset()
box_metric.reset()
tic = time.time()
# iterate through all batch
for i, batch in enumerate(train_data):
btic = time.time()
# record gradients
with ag.record():
x = batch.data[0].as_in_context(ctx)
y = batch.label[0].as_in_context(ctx)
default_anchors, class_predictions, box_predictions = net(x)
box_target, box_mask, cls_target = training_targets(default_anchors, class_predictions, y)
# losses
loss1 = cls_loss(class_predictions, cls_target)
loss2 = box_loss(box_predictions, box_target, box_mask)
# sum all losses
loss = loss1 + loss2
# backpropagate
loss.backward()
# apply
trainer.step(batch_size)
# update metrics
cls_metric.update([cls_target], [nd.transpose(class_predictions, (0, 2, 1))])
box_metric.update([box_target], [box_predictions * box_mask])
if (i + 1) % log_interval == 0:
name1, val1 = cls_metric.get()
name2, val2 = box_metric.get()
print('[Epoch %d Batch %d] speed: %f samples/s, training: %s=%f, %s=%f'
%(epoch ,i, batch_size/(time.time()-btic), name1, val1, name2, val2))
# end of epoch logging
name1, val1 = cls_metric.get()
name2, val2 = box_metric.get()
print('[Epoch %d] training: %s=%f, %s=%f'%(epoch, name1, val1, name2, val2))
print('[Epoch %d] time cost: %f'%(epoch, time.time()-tic))
# we can save the trained parameters to disk
net.save_params('ssd_%d.params' % epochs)
import numpy as np
import cv2
def preprocess(image):
"""Takes an image and apply preprocess"""
# resize to data_shape
image = cv2.resize(image, (data_shape, data_shape))
# swap BGR to RGB
image = image[:, :, (2, 1, 0)]
# convert to float before subtracting mean
image = image.astype(np.float32)
# subtract mean
image -= np.array([123, 117, 104])
# organize as [batch-channel-height-width]
image = np.transpose(image, (2, 0, 1))
image = image[np.newaxis, :]
# convert to ndarray
image = nd.array(image)
return image
image = cv2.imread('/Users/jintian/Downloads/images.jpeg')
x = preprocess(image)
print('x', x.shape)
anchors, cls_preds, box_preds = net(x.as_in_context(ctx))
print('anchors', anchors)
print('class predictions', cls_preds)
print('box delta predictions', box_preds)
from mxnet.contrib.ndarray import MultiBoxDetection
# convert predictions to probabilities using softmax
cls_probs = nd.SoftmaxActivation(nd.transpose(cls_preds, (0, 2, 1)), mode='channel')
# apply shifts to anchors boxes, non-maximum-suppression, etc...
output = MultiBoxDetection(*[cls_probs, box_preds, anchors], force_suppress=True, clip=False)
print(output)
上面训练完之后,就可以直接预测啦,结果还是非常不错的:
def display(img, out, thresh=0.5):
import random
import matplotlib as mpl
mpl.rcParams['figure.figsize'] = (10,10)
pens = dict()
plt.clf()
plt.imshow(img)
for det in out:
cid = int(det[0])
if cid < 0:
continue
score = det[1]
if score < thresh:
continue
if cid not in pens:
pens[cid] = (random.random(), random.random(), random.random())
scales = [img.shape[1], img.shape[0]] * 2
xmin, ymin, xmax, ymax = [int(p * s) for p, s in zip(det[2:6].tolist(), scales)]
rect = plt.Rectangle((xmin, ymin), xmax - xmin, ymax - ymin, fill=False,
edgecolor=pens[cid], linewidth=3)
plt.gca().add_patch(rect)
text = class_names[cid]
plt.gca().text(xmin, ymin-2, '{:s} {:.3f}'.format(text, score),
bbox=dict(facecolor=pens[cid], alpha=0.5),
fontsize=12, color='white')
plt.show()
display(image[:, :, (2, 1, 0)], output[0].asnumpy(), thresh=0.45)
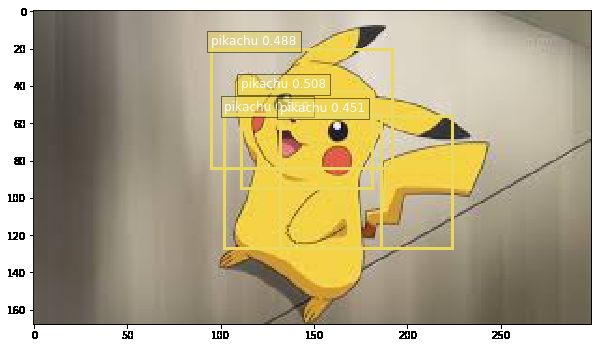
3. 整体代码构建
上面更多的是以ipython notebook的形式一步一步展示,如果你想要一个完成的python工程代码,可以从我的repo中获取: 传送门. 最后来看一下我们最终结果怎么样:
看上去还是非常不错的哈!!