ZYNQ HLS工具系列(一) HLS图像处理入门
ZYNQ开发之HLS图像处理入门
HLS(High Level Synthesis)即高层次综合,和以前Verilog及VHDL不一样,通过它可以用C/C++、SystemC及OPENCL编写FPGA程序,实现相应功能,大大加快开发的速度,使软件工程师可以参与到项目中,使硬件工程师可以增加工作效率
OPENCV是开源计算机视觉库,支持C/C++、PYTHON等多种语言,OPENCV的设计可以直接运行在ZYNQ的PS上,但是用ARM处理高清视频处理的时候,可能就会处理不过来。于是HLS OPENCV就这样出现了(硬件加速),HLS Opencv是HLS自带的、可综合成HDL的OpenCV库函数(因为并不是所有的OpenCV库函数都可以综合成HDL),HLS OPENCV具体的函数操作方法,将写在理论系列(一) HLS OPENCV函数,本文主要是针对HLS的入门操作
一、运行环境
这个HLS的版本很重要!!!
之前尝试用HLS普通的仿真没问题,但是对图像进行C仿真(调用HLS带的函数),仿真编译的时间就很长,而且结果报错:
cc1plus.exe:-1: error: out of memory allocating ……
解决方法:不要使用2017.1和2017.2的HLS,降到2016.4,或者升级到2017.3(本文2017.3)
二、搭建HLS工程
1.新建工程,根据向导设置相关参数
新建工程的最后一步,新建了一个solution1,时钟周期就默认10ns,然后选择芯片型号,完成工程的创建2.新建文件
新建三个文件test.cpp(测试文件)、image_core.cpp(算法核心)以及image_core.h,文件内容
test.cpp:
#include "image_core.h"
#include "opencv/cv.h"
#include "opencv/cxcore.h"
#include "opencv/highgui.h"
#include "hls_opencv.h"
#define INPUT_IMAGE "test.jpg"
int main (int argc, char** argv) {
IplImage* src = cvLoadImage(INPUT_IMAGE,0);//读图片灰度
IplImage* dst = cvCreateImage(cvGetSize(src), src->depth, src->nChannels);
AXI_STREAM_IN src_axi;
AXI_STREAM_OUT dst_axi;
IplImage2AXIvideo(src, src_axi); //将图像转为数据流
image_core(src_axi, dst_axi, src->height, src->width);//输入数据流,进行处理,输出数据流
AXIvideo2IplImage(dst_axi, dst); //将输出流转回图片
cvShowImage("src",src);
cvShowImage("dst",dst);
cvWaitKey(0);
cvReleaseImage(&src);
cvReleaseImage(&dst);
return 0;
}image_core.cpp:
#include "image_core.h"
void image_core(AXI_STREAM_IN& input, AXI_STREAM_OUT& output, int rows, int cols){
#pragma HLS RESOURCE variable=input core=AXI4Stream metadata="-bus_bundle INPUT_STREAM"
#pragma HLS RESOURCE variable=output core=AXI4Stream metadata="-bus_bundle OUTPUT_STREAM"
#pragma HLS INTERFACE ap_none port=cols
#pragma HLS INTERFACE ap_none port=rows
#pragma HLS interface ap_ctrl_none port=return
RGB_IMAGE img_0(rows, cols);
RGB_IMAGE img_1(rows, cols);
#pragma HLS DATAFLOW // must use data flow to stream the data
hls::AXIvideo2Mat(input, img_0); //读输入到img_0
hls::Sobel<1,0,3>(img_0, img_1); //Sobel算子,边缘提取
hls::Mat2AXIvideo(img_1, output); //img_1写到输出
}image_core.h:
#ifndef _IMAGE_CORE_H_
#define _IMAGE_CORE_H_
#include"hls_video.h" //调用可以综合的视频库
//图像最大尺寸
#define MAX_WIDTH 800
#define MAX_HEIGHT 600
//定义图像处理核,要用到的结构体
typedef hls::stream24,1,1,1> > AXI_STREAM_IN;
typedef hls::stream24,1,1,1> > AXI_STREAM_OUT;
typedef hls::Mat RGB_IMAGE;
//硬件综合的顶层
void image_core(AXI_STREAM_IN& src_axi, AXI_STREAM_OUT& dst_axi, int rows, int cols);
#endif 3.添加文件到相应位置
将上述三个文件放在工程目录下,然后如图添加:
h文件,不需要添加,放在工程目录下即可4.运行仿真
点击Run C Simulation按钮,然后直接点确定
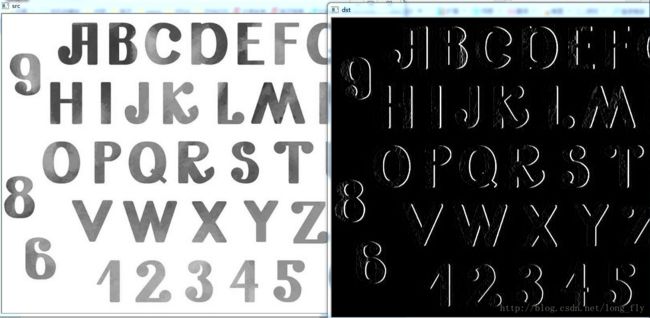
按空格键,关闭图片5.生成IP核
点击Run C Synthesis,综合完毕后,然后点击Export RTL

生成完毕后,即可通过VIVADO调用HLS的IP核(image_core)