51单片机入门实验教程(流水灯、蜂鸣器、中断、串口通信)
目录
C语言知识点:
51单片机简单实验
51单片机引脚图
1、点亮led灯
2、闪烁led灯
3、led流水灯
4、蜂鸣器
6、中断
6.1、中断的定义
6.2、中断源、中断寄存器和中断优先级
6.3、中断处理过程
7、外部中断
8、定时器和计数器中断
8.1、CPU时序的有关知识
8.2、51单片机定时器/计数器
8.3、定时/计数器的工作方式
9、串口通信
9.1、串口通信的原理
9.2、80C51的串行口
9.3、串行口的工作方式
C语言知识点:
1、sbit:
sbit 变量名=地址名; //在给某个引脚取名的时候2、#typedef使用:重新定义一些常用的关键词
typedef unsigned char u8; //使u8可定义无符号字符型
typedef unsigned int u16; //使u16可定义无符号整型3、#define
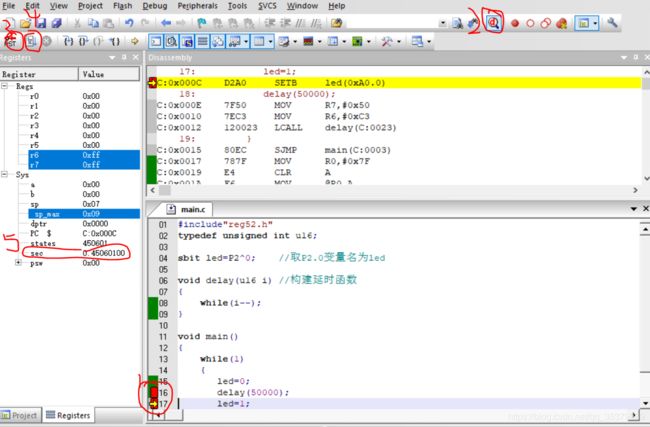
#define A P0 //用A来定义成P04、延时函数:可通过设置断点(在左侧行数栏双击)进行debug调试查看具体延时时间
void delay(u16 i) //i为1时,大约延时10us
{
while(i--);
}
5、循环左移右移函数(包含在intrins.h库函数中)
_crol_(a,b); //循环左移函数,a是左移值,b是左移的位数
_cror_(a,b); //循环右移函数,a是右移值,b是右移的位数
51单片机简单实验
51单片机引脚图
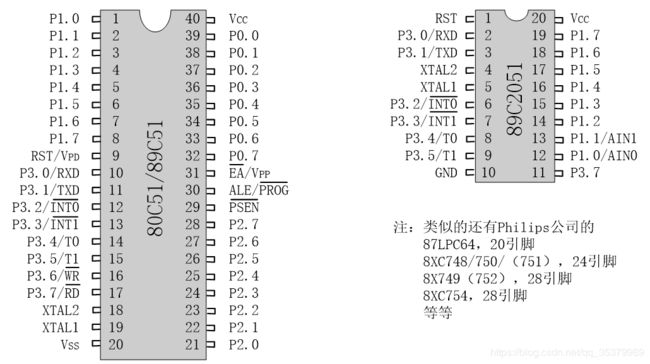
P3口第二功能各引脚功能定义:
P3.0:RXD串行口输入
P3.1:TXD串行口输出
P3.2:INT0外部中断0输入
P3.3:INT1外部中断1输入
P3.4:T0定时器0外部输入
P3.5:T1定时器1外部输入
P3.6:WR外部写控制
P3.7:RD外部读控制
1、点亮led灯
这里我的开发板上led灯当引脚输出为低电平时点亮,故选取了P2.0引脚使其输出低电平(此处可根据自己led连接或者板上电路来设置高低电平)
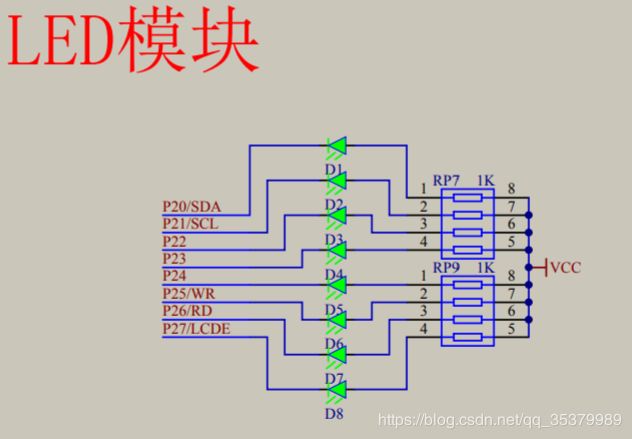
#include"reg52.h"
sbit led=P2^0; //取P2.0变量名为led
void main()
{
while(1)
{
led=0;
}
}2、闪烁led灯
闪烁程序上即为在点亮后进行延时一段时间在熄灭再延时,执行如此循环,故可在上一个程序中修改为:
#include"reg52.h"
typedef unsigned int u16;
sbit led=P2^0; //取P2.0变量名为led
void delay(u16 i) //构建延时函数
{
while(i--);
}
void main()
{
while(1)
{
led=0;
delay(50000);
led=1;
delay(50000);
}
}3、led流水灯
#include"reg52.h"
#include"intrins.h"
#define led P2 //将P2定义为led
typedef unsigned int u16;
typedef unsigned char u8;
void delay(u16 i) //构建延时函数
{
while(i--);
}
void main()
{
u8 i;
led=0xfe; //1111 1110
delay(50000); //延时450ms
while(1)
{
for(i=0;i<7;i++)
{
led=_crol_(led,1);
delay(500000);
}
}
}4、蜂鸣器


无源蜂鸣器(压电式蜂鸣器):左边第一张图即有绿色电路板,由多谐振荡器、压电蜂鸣片等组成,接通电源后(1.5v~15v直流工作电压),多谐振荡器起振,输出1.5~2.5kHZ的音频信号,发声。需要形成脉冲控制,改变单片机输出波形的频率(脉冲周期),就可以控制蜂鸣器音调,产生不同音色、音调的声音;改变输出电平的高低电平占空比,则可以控制蜂鸣器的声音大小
有源蜂鸣器(电磁式蜂鸣器):下部无绿色电路板,内部含有振荡器电路,接通电源后,振荡器产生音频信号电流通过电磁线圈,使电磁线圈产生磁场,周期性振动地发声。可通过单片机高低电平直接控制
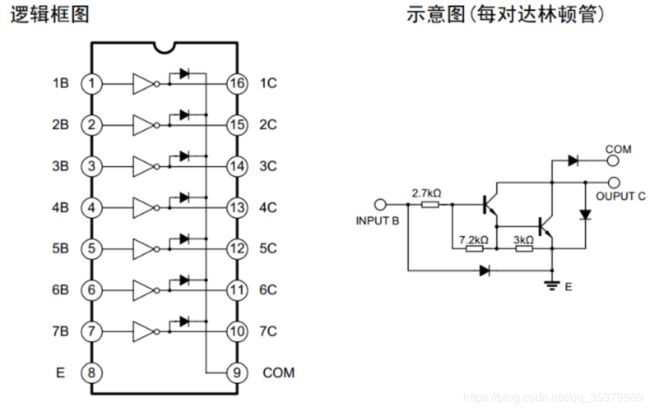
ULN2003:高耐压、大电流达林顿陈列,由七个npn达林顿管组成(com接VCC,E接GND)
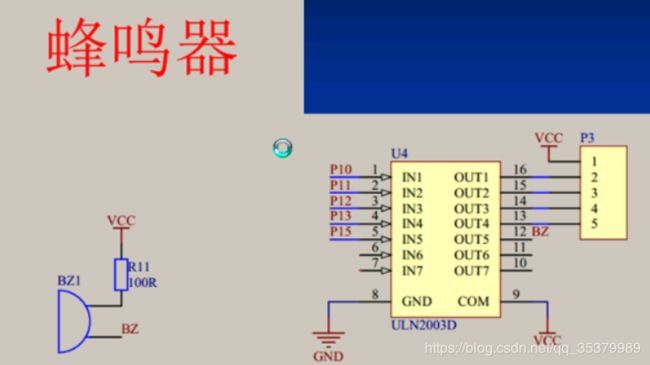
这里我的开发板上蜂鸣器连接引脚P1^5故可设置如下程序:
#include"reg52.h"
typedef unsigned int u16;
sbit beep=P1^5;
void delay(u16 i) //延时函数
{
while(i--);
}
void main()
{
while(1)
{
beep=~beep; //取反
delay(10); //延时100us,不同延时频率不同声音不同
}
}6、中断
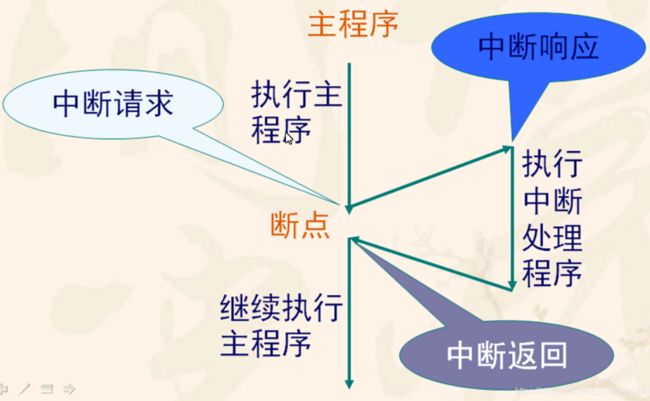
6.1、中断的定义
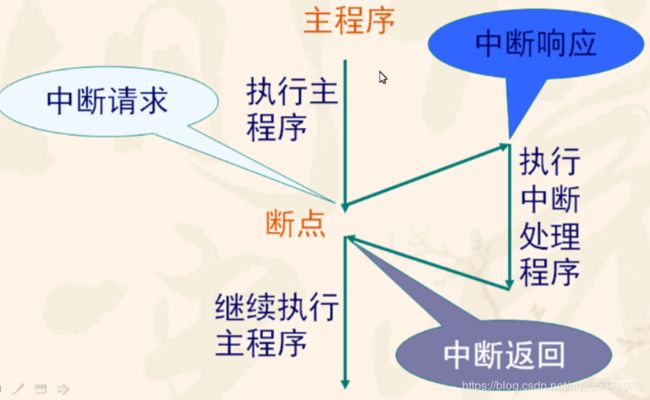
CPU在处理某一事件时,发生另一事件B请求CPU迅速去处理(中断发生),CPU暂时中断当前的工作,转去处理需要迅速处理的事件(中断响应和中断服务),待中断事件处理完成后继续处理原事件(中断返回)
引起CPU中断的根源称为中断源,CPU暂时中断原来的事件转向中断事件,处理完成后回到原来的地方(即断点),实现中断功能的部件称为中断系统。
中断的优点:分时操作:CPU可以分时为多个I/O设备服务,提高计算机的利用率、实时响应:CPU能够及时处理应用系统的随机事件,实时性大大增强、可靠性高:CPU具有处理设备故障及掉电等突发事件能力,使可靠性提高、解决了快速主机预慢速I/O设备的数据传输问题
6.2、中断源、中断寄存器和中断优先级
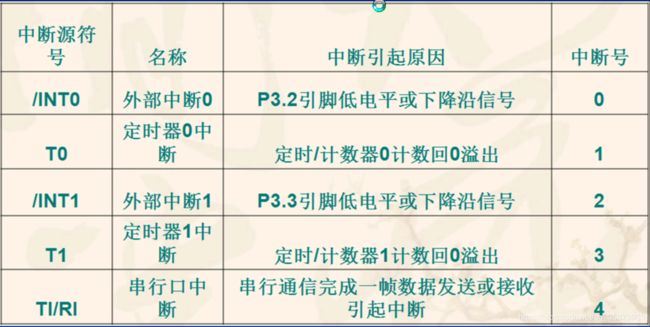
89C51的中断系统有5个中断源,2个中断优先级,可实现二级中断嵌套。五个中断源如图由上至下对应为外部中断0、定时器0、外部中断1、定时器1、串口中断,其中断优先级由上至下递减;TCON中的IT0和IT1可决定INT0和INT1低电平有效还是下降沿有效;对应的中断标志位IE0、TF0(定时器0溢出)、IE1、TF1(定时器1溢出)为1时触发中断,当RX或TX串行口接受或者发送完成RI或TI置1触发中断;
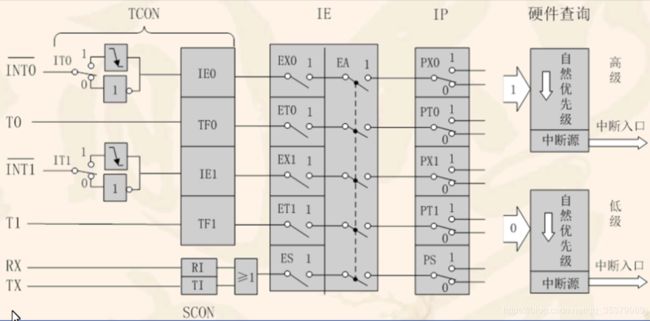
CPU对中断系统所有中断及某个中断源的开放和屏蔽是由中断寄存器IE控制的。
EX0(IE.0):外部中断0允许位;ET0(IE.1):定时/计数器T0中断允许位;EX1(IE.2):外部中断1允许位;ET1(定时/计数器T1中断允许位);ES(IE.4)串行口中断允许位;EA(IE.7):CPU中断总允许位

TCON中断请求标志。

IT0(TCON.0),外部中断0触发方式控制位。当IT0=0时,为电平触发方式;当IT0=1时,为边沿触发方式(下降沿有效)。
IE0(TCON.1),外部中断0中断请求标志位。发生中断后标志位置一。
IT1(TCON.2),外部中断1触发方式控制位。
IE1(TCON.3),外部中断1中断请求标志位。
TF0(TCON.5),定时/计数器T0溢出请求标志位。
TF1(TCON.7),定时/计数器T1溢出中断请求标志位。
同一优先级的中断请求不止一个时,则有中断优先级的排队问题。其排列如图所示:

中断源
正在进行的中断过程不能被新的同级或低级优先级的中断请求所中断,进行的低优先级中断服务可被高优先级中断请求所中断。
6.3、中断处理过程
中断响应条件:
中断源有中断请求;
此中断源的中断标志位为1;
CPU开中断(即EA=1)。
使用中断,需要做什么
想使用的中断是哪个?选择而响应的中断号;
希望触发的条件是什么?
希望在中断之后干什么?
以外部中断0为例
EA=1; //打开总中断开关
EX0=1; //打开外部中断0
IT0=0/1; //设置外部中断的触发方式,0为低电平1为下降沿
中断服务函数
void int0 () interrupt 0 using 1 //int0为函数名称,() interrupt为固定格式,0位中断号,using1可不写
{
do anything that you want
}7、外部中断
51单片机中断系统结构
P3.0:RXD串行口输入
P3.1:TXD串行口输出
P3.2:INT0外部中断0输入
P3.3:INT1外部中断1输入
P3.4:T0定时器0外部输入
P3.5:T1定时器1外部输入
外部中断实验:
将开关连接至单片机的P3.2口(外部中断0),按下开关使得连接至P2.0的小灯点亮状态进行取反。
#include "reg52.h"
typedef unsigned int u16;
typedef unsigned char u8;
sbit key = P3 ^ 2; //定义按键key
sbit led = P2 ^ 0; //定义P2.0为led口
void delay(u16 i) //构建延时函数
{
while (i--);
}
void Int0Init() //构建中断初始化函数
{
EA = 1;
EX0 = 1;
IT0 = 1;
}
void main()
{
Int0Init(); //设置外部中断0
while (1);
}
void Int0() interrupt 0 //中断响应程序
{
delay(1000); //延时消抖
if (key == 0)
led = ~led;
}8、定时器和计数器中断
8.1、CPU时序的有关知识
振荡周期:为单片机提供定时信号的振荡源的周期(即为晶振周期或外加振荡周期)(一般外界晶振为12M,一个振荡周期为1/12us)
状态周期:2个振荡周期为1个状态周期,用S表示。(若为12m晶振,一个状态周期为1/6us)
机器周期:1个机器周期含6个状态周期,12个振荡周期。(若为12m晶振,一个机器周期=12x1/12m,即为1us)
指令周期:完成1条指令所占用的全部时间,以机器周期为单位。(若为12m晶振,1~4us)
8.2、51单片机定时器/计数器
8.2.1 需要了解的知识
51单片机有两组定时器/计数器,因为既可以定时,又可以计数。
定时器/计数器和单片机CPU是相互独立的。定时器/计数器工作过程不需要CPU的参与。可以增加单片机的效率,一些简单的重复加1的工作可以交给定时器/计数器处理。同时实现精确定时的作用。
51单片机中的定时器/计数器是根据机器内部的时钟或者是外部的脉冲信号对寄存器的数据加1。
8.2.2 工作原理
定时/计数器实际上是一个加1的计数器。它随着计数器的输入脉冲进行自加1,也就是每来一个脉冲计数器就自动加1,当加到计数器全为1时,再输入一个脉冲就使计数器回零,且计数器的溢出使得相应的中断标志位置一,同CPU发出中断请求。
可见,由溢出时计数器的值减去计数器的初值才是加1计数器的值。
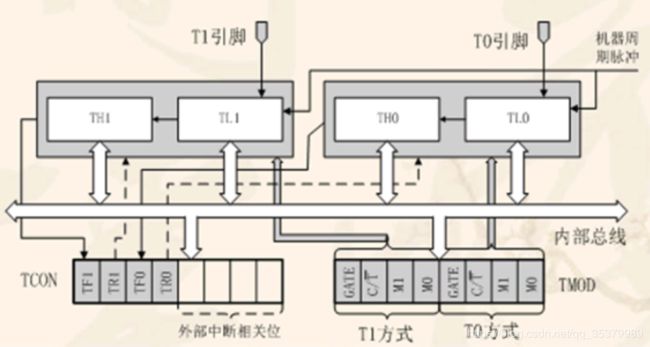
定时/计数器的实质是加1计数器(16位),由高8位和低8位两个寄存器THx和TLx组成。TMOD是定时/计数器的工作方式寄存器,确定工作方式和功能;TCON是控制寄存器,控制T0、T1的启动停止及设置溢出标志。
8.2.3、定时/计数器的控制
定时/计数器工作由两个特殊功能寄存器控制。TMOD用于设置其工作方式;TCON用于控制其启动和中断申请。
(1)工作方式寄存器TMOD
工作方式寄存器TMOD用于设置定时/计数器的工作方式,低四位用于T0,高四位用于T1。格式如下:

GATE是门控位,用于控制定时器的启动是否受中断源的影响。GATE位0时,只要软件使TCON中的TR0和TR1位1,就可以使定时器/计数器工作;GATE=1时,需要外部中断INT0/1也为高电平时,TR0或TR1为1,才能启动定时/计数器工作。
C/T:定时/计数模式选择位。C/T=0为定时模式;C/T=1为计数模式。
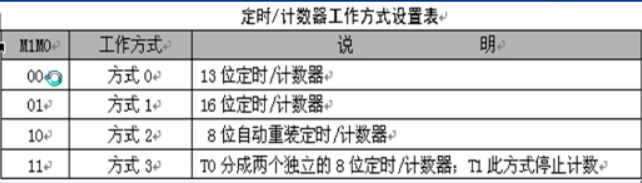
M1 M0:工作方式设置位。定时/计数器有四种工作方式。(一般使用方式1和方式2)
(2)控制寄存器TCON
TCON的高4位用于控制定时/计数器的启动和中断。格式如下:

TF1(TCON.7):T1溢出中断请求标志位。T1计数溢出时由硬件自动置1,CPU响应中断后TF1由硬件自动清0。T1工作时,CPU可随时查询TF1的状态,TF1可用作查询测试的标志。TF1也可用软件置1或清0。
TR1(TCON.6):T1运行控制位。TR1置1时,T1开始工作;TR1置0时,T1停止工作。TR1由软件置1或清0.
TF0(TCON.5):T0溢出中断请求标志位,其功能与TF1类同。
TR0(TCON.4):T0运行控制位,其功能与TR1类同。
8.3、定时/计数器的工作方式
1、方式0
方式0位13位计数器,由TL0的低5位(高3位未用)和TH0的8位组成。TL0的低5位溢出时向TH0进位,TH0溢出时,置位TCON中的TF0的标志,向CPU发出中断请求。
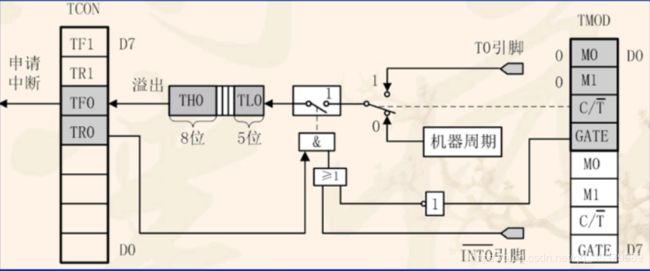
定时器模式有:N=t/Tcy,定时器的初值还可以采用计数个数直接取补法获得
计数器初值计算公式为:X=2^13-N,计数模式时计数脉冲是T0引脚上的外部脉冲获得
门控位GATE具有特殊的作用。当GATE=0时,经反向后使或门输出为1,此时仅由TR0控制与门的开启,与门输出1时,控制开关接通,计数开始;当GATE=1时,由外中断引脚信号控制或门的输出,此时控制与门的开启由外部中断引脚信号和TR0共同控制。
2、方式1
方式1的计数位数是16位,由TL0作为低8位,TH0作为高8位,组成了16加1计数器。
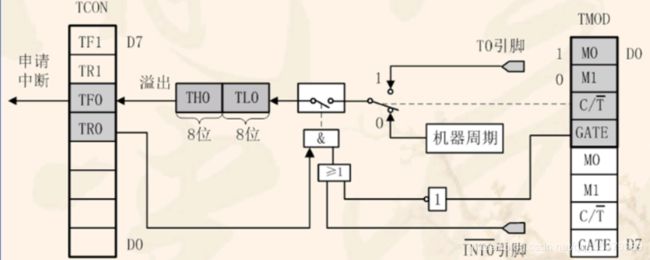
计数个数与计数初值的关系为:X=2^16-N
3、方式2
方式2位自动重装初值的8位计数方式。(只要低8位计满就会重新装载)
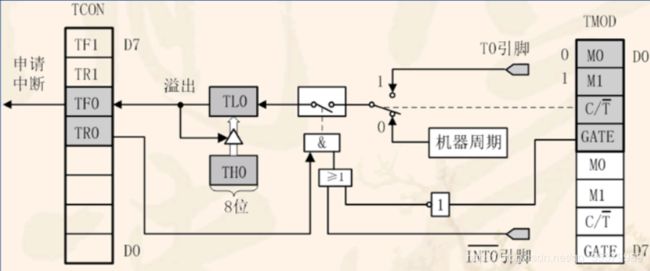
计数与计数初值的关系为:X=2^8-N,适合于用作较精确的脉冲信号发生器。
4、方式3
方式3只适用于定时/计数器T0,定时器T1处于方式3时相当于TR1=0,停止计数。
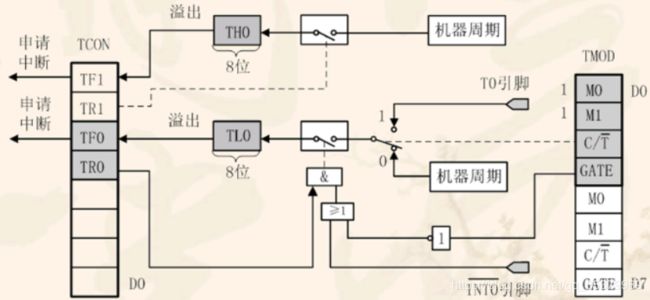
工作方式3将T0分成两个的8位计数器TL0和TH0。
使用定时/计数器该做哪些工作:
对TMOD赋值,以确定T0和T1的工作方式。
计算初值,并将其写入TH0、TL0或TH1、TL1。
中断方式时,对EA赋值,开放定时器中断。
使TR0或TR1置位,启动定时/计数器定时或计数
计数器初值的计算
机器周期也就是完成一个基本操作所需要的时间。
机器周期=1/单片机的时钟频率
51单片机的时钟频率是外部时钟的12分频。也就是说当外部晶振的频率输入到单片机里面的时候要进行12分频。当使用12M晶振,那么单片机内部的时钟频率就是12/12MHZ,机器周期=1us
定时1ms的初值是多少呢?1ms=1000us。也就是要数1000个数,初值=65535-1000+1(因为实际上计数器记到66636才溢出)=64536=FC18H
8.4、定时器中断例程
时间小灯间隔1s的闪烁,连接led至P2^0口,使用定时器0进行定时
#include "reg52.h"
typedef unsigned int u16;
typedef unsigned char u8;
sbit led = P2 ^ 0;
void time0Init()
{
TMOD = 0x01; //定时器0门控位设置为0,设置为定时器模式,计数模式1
TH0 = 0xFC; //设置定时器初值
TL0 = 0x18;
EA = 1; //开启总中断
ET0 = 1; //打开定时器0中断允许
TR0 = 1; //打开定时器
}
void main()
{
time0Init();
while (1);
}
void time0() interrupt 1
{
static u16 i; //设置静态变量,每过1ms即执行一次中断加1
TH0 = 0xFC; //赋予初值
TL0 = 0x18;
i++;
if (i == 1000) //u16累加至1000即过1s后i清0 led状态取反
{
i = 0;
led = ~led;
}
}9、串口通信
9.1、串口通信的原理
计算机通信是指计算机与外部设备或计算机与计算机之间的信息交换。通信有并行通信和串行通信两种。
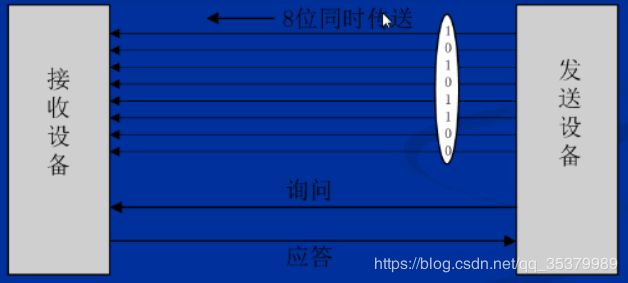
并行通信:将数据字节的各位用多条数据线同时进行传送。
并行通信特点:控制简单、传输速度快;由于传输线较多,长距离传送成本高且接受的各位同时接收存在困难。
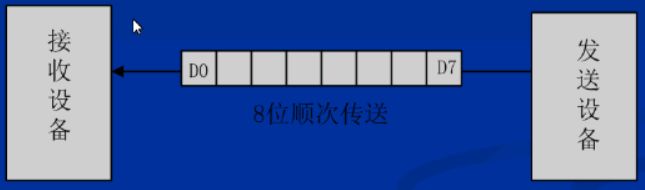
串行通信:将数据字节分成一位一位的形式在一条传输线上逐个地传送。
串行通信的特点:传输线少,长距离传送时成本低,且可以利用电话网等现成的设备,但数据的传送控制比2并行通信复杂。
串行通信的基本概念
一、异步通信与同步通信
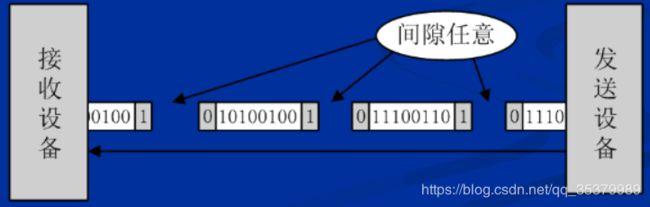
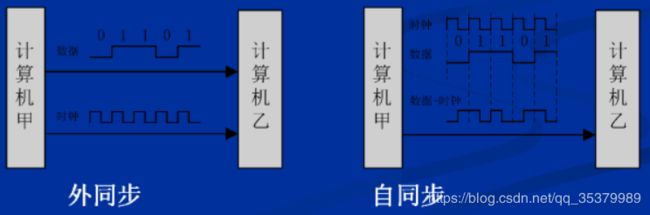
1、异步通信:通信的发送与接收设备使用各自的时钟控制数据的发送和接收过程。为使双方的收发协调,要求发送和接收的时钟尽可能一致。
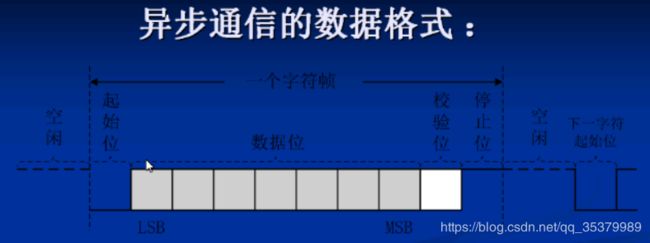
异步通信是以字符(构成的帧)为单位进行传输,字符与字符之间的间隙(时间间隔)是任意的,但同一字符内的各位之间的距离均为“位间隔”的整数倍。
异步通信的特点:不要求收发双方时钟的严格一致,实现容易,设备开销较小,但每个字符要附加2~3位用于起止位,各帧之间还有间隔,因此传输效率不高。
2、同步通信:建立发送方时钟对接收方时钟的直接控制,使双方达到完全同步。此时,传输数据的位之间的距离均为“位间隔”的整数倍,同时传送的字符间不留间隙,即保持位同步关系,也保持字符同步关系。发送方对接收方的同步可以通过两种两种方法实现。(数据加时钟形式传送)
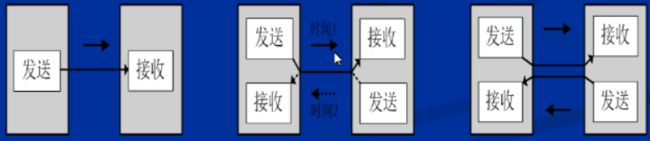
二、串行通信的传输方向
单工:数据仅能沿一个方向,不能实现反向传输。
半双工:数据可以沿两个方向,但需要分时进行。
全双工:数据可以同时进行双向传输。
串行通信常见的错误校验
1、奇偶校验:发送数据时,数据位尾随的1位为奇偶校验位(1或0)。奇校验时,数据中的“1”的个数与校验位“1”的个数之和为奇数;偶校验时,数据中“1”的个数与校验位“1”的个数之和应为偶数。接收字符时,对“1”的个数进行校验,若发现不一致,则说明传输数据中出现了差错。(如传输数据为1101110数据位1的个数为5奇数,若为奇校验则校验位为0)
2、代码和校验
3、循环冗余校验
三、传输速率
1、比特率:每秒传输二进制代码的位数,单位是:位/秒(bps)。如每秒钟传送240个字符,而每个字符格式包含10位(1个起始位、1个停止位、8个数据位),这时比特率为:
10位X240个/秒=2400bps
2、传输距离与传输速率之间的关系
串行接口或终端直接传送串行信息位流的最大距离与传输速率及传输线的电气特性有关。传输距离随传输速率的增加而减小。
四、串行通信接口标准
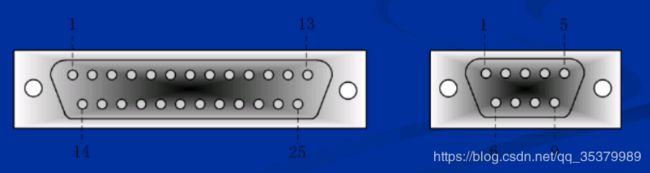
1、RS-232C接口:EIA(美国电子工业协会)修订,定义了数据终端设备与数据通信设备之间的物理接口标准。
(1)机械特性:RS-232C接口规定使用25针连接器,连接器的尺寸及每个插针的排列位置都有明确的定义。
(2)过程特性:过程特性规定了信号之间的时序关系,以便正确地接收和发送数据。
远程通信连接(RTS请求发送,DSR数据建立就绪,TXD发送数据,RXD接收数据)
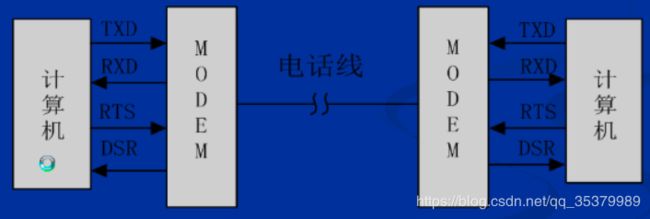
近程通信连接
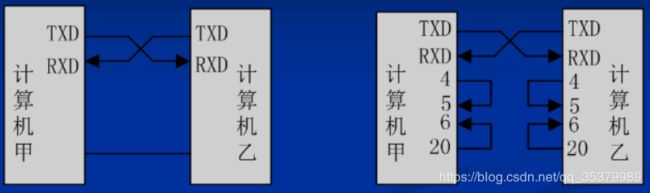
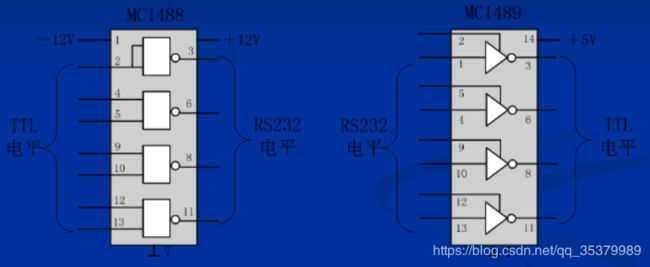
RS-232C电平与TTL电平转换驱动电路(将5V的单片机电平转换为12V的计算机串口电平,将12V的计算机电平转换为计算机的12V电平)
2、采用RS-232C接口存在的问题(通常使用在通信距离短的设备)
传输距离短,传输速率低:受电容允许值的约束,使用传输距离一般不要超过15m。最高传送速率为20Kbps。
有电平漂移:RS232C要求收发双方共地。通信距离较大时,收发双方的地电位差别较大,在信号地上将有比较大的地电流并产生压降。
抗干扰能力差:RS-232C在电平转换时采用单端输入输出,在传输过程中当干扰和噪声混在正常的信号中。为了提高信噪比,RS-232C总线标准不得不采用较大的电压摆幅。
9.2、80C51的串行口
80C51串行口结构
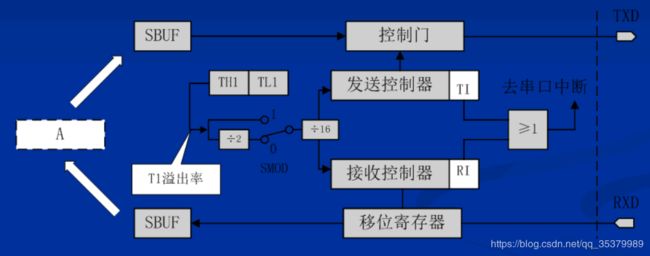
有两个物理上独立的接收、发送缓冲器SBUF,它们占用同一地址99H(因此在编程时通常无论接收还是发送都写SBUF);接收器是双缓存结构;发送缓冲器由于是CPU主动进行发送,不会产生重叠错误。
1、80C51串行口的控制寄存器
SCON是一个特殊功能寄存器,用以设定串行口的工作方式、接收/发送控制以及设置状态标志:

SM0和SM1为工作方式选择位,可以选择四种工作方式:(通常采用方式1)

SM2,多机通信控制位,主要用于方式2和方式3.当接收机的SM2=1时可以利用收到的RB8来控制是否激活RI(RB8=0时不激活RI,收到信息丢弃)。当SM2=0时,不论收到的RB8为0和1,均可以使收到的数据进入SBUF,并激活RI。通过SM2,可以实现多机通信。方式0时,SM2必须是0。在方式1时,如果SM2=1,则只有接收到有效停止位时,RI才置1.
REN,允许串行接收位,由软件置REN=1,则启动串行口接收数据;若软件置REN=0,则禁止接收。
TB8,在方式2或方式3中,时发送数据的第九位,在方式0和方式1中,该位未用。
RB8,在方式2或方式3中,是接收到数据的第九位。
TI,发送中断标志位。在方式0时,当串行发送第8位数据结束时(或其他方式,串行发送停止位的开始时),由内部硬件使TI置1,向CPU发中断申请。在中断服务程序中,必须用软件将其清0,取消此中断申请。
RI接收中断标志位。在方式0时,当串行口接收第8位数据结束时(或其他方式,串行接收停止位的中间时),由内部硬件使RI置1,向CPU发出中断申请。也必须在中断服务程序中,用软件将其清0,取消中断申请。
PCON中只有一位SMOD与串行口工作有关:

SMOD(PCON.7) 波特率倍增位。在串行口方式1、方式2、方式3时,波特率与SMOD有关,当SMOD=1时,波特率提高一倍。复位时,SMOD=0.
9.3、串行口的工作方式
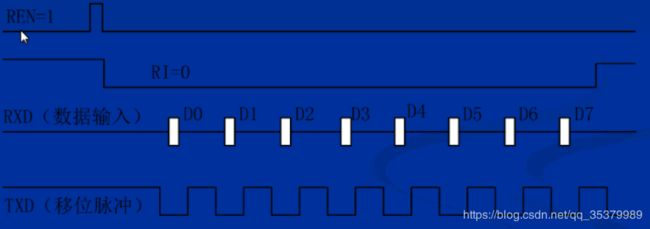
1、方式0
方式0时,串行口位同步移位寄存器的输入输出方式。主要用于扩展并行输入或输出口。数据由RXD(P3.0)引脚输入或输出,同步移位脉冲由TXD(P3.1)引脚输出。发送和接收均为8位数据,低位在先,高位在后。波特率固定为fosc/12。
发送时,如图先发送低位后发送高位,发送完成后TI置1
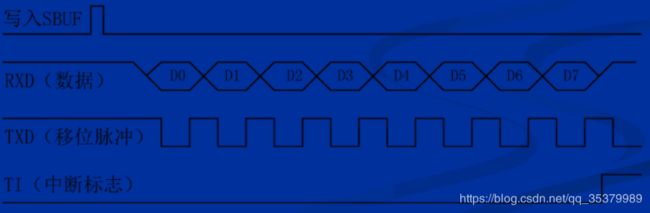
接收时,当接收完成后RI由硬件置1.
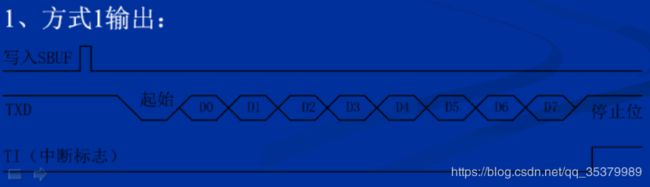
2、方式1
方式1是10位数据的异步通信口。TXD位数据发送引脚,RXD为数据接收引脚,传送一帧数据的格式如图所示。其中1位起始位,8位数据位,1位停止位。

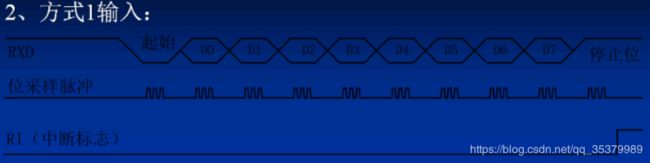
用软件置REN为1,接收器以所选择波特率的16倍速率采样RXD引脚电平,检测到RXD引脚输入电平发生负跳变时,则说明起始位有效,将