无人机动力系统设计之电调芯片参数选型
无人机动力系统设计之电调芯片参数选型
- 1. 源由
- 2. 关键因素
-
- 2.1 电压范围
- 2.2 电流处理能力
- 2.3 控制方式
- 2.4 PWM输出与分辨率
- 2.5 通讯接口
- 2.6 保护功能
- 2.7 支持霍尔传感器与无传感器模式
- 2.8 集成度与外围器件
- 2.9 效率与散热
- 2.10 市场供应与成本
- 3. 因素阐述
-
- 3.1 PWM工作频率
-
- 3.1.1 电机控制芯片
- 3.1.2 单片机算法
-
- 定时器(Timers)
- 电机控制部分
- 3.2 单片机工作频率
-
- Step 1 定时器频率
- Step 2 计数器位数
- Step 3 PWM频率计算
- Step 4 最大PWM周期(最低频率)
- Step 5 最小PWM周期(最高频率)
- Step 6 PWM频率范围
- 4. 考量范围
-
- 4.1 外围规格
- 4.2 量化规格
- 5. 实际设计
- 6. 参考资料
- 7. 附录
-
- 7.1 电调设计方案?
- 7.2 EMI设计考虑?
- 7.3 认证介绍
1. 源由
从动力系统套件的角度来说,桨叶+电机+电调+电池+飞控。
- 桨叶:机械能转势能+克服阻力做工。
- 电机:电能转机械能+热能+电磁能。
- 电调:电能驱动控制+热能。
- 飞控:飞行计划对电能的合理分配。
- 电池:供电主能源(如果油动那就化学能转换电能)。
相对来说,由于无刷电机的控制较为复杂,且存在各种驱动算法。因此在器件选型设计上需要慎之又慎。
为此,结合实际经验和设计细节,对无人机(多旋翼)电调芯片参数选型方面进行一些汇总整理。期望能对后续产品规格和定义提供一些经验和原理。
2. 关键因素
选择适合的BLDC(无刷直流电机)电子调速器芯片,需要根据以下几个关键因素来确定:
2.1 电压范围
- 芯片必须支持目标BLDC电机的工作电压范围。电子调速器常用于各种电压范围,从2S(7.4V)到18S(66.6V),甚至更高,因此芯片的电压耐受能力至关重要。
- 典型的电压规格:
- 小型无人机或电动滑板:3S(11.1V)、6S(22.2V)
- 工业应用或大功率电机:12S(44.4)、18S(66.6V),甚至更高
- 确保芯片的电源输入范围能够覆盖目标应用的电压需求。
2.2 电流处理能力
- 调速器芯片必须能够处理BLDC电机所需的最大电流,特别是在满载时。过大的电流会导致芯片过热或损坏,因此芯片必须具有良好的电流处理能力。
- 从实际使用的情况,电流处理能力分为两种:持续电流和峰值电流。
- 芯片通常需要内置过流保护功能,防止过载时芯片和电机损坏。
2.3 控制方式
- 方波控制、正弦波控制、**FOC(磁场定向控制)**是常见的控制算法:
- 方波控制:简单且成本低,适用于低成本、低效率要求的应用。
- 正弦波控制:相比方波噪音小,效率高,适用于需要平稳运行的场景。
- FOC(磁场定向控制):先进的矢量控制技术,能提供精确的速度和扭矩控制,适用于高精度要求的应用如无人机、机器人。
- 根据应用需求选择支持相应控制方式的芯片。FOC控制芯片适合更复杂的应用场景。
2.4 PWM输出与分辨率
- 调速器通常通过PWM(脉宽调制)信号控制BLDC电机的速度和转矩。芯片的PWM频率和分辨率会影响调速的精度和平滑度。
- 高速旋转的电机需要更高频率的PWM信号,以实现平稳的转速控制。典型的PWM频率范围为20kHz-50kHz。
- 高分辨率的PWM控制(如12位或更高)可以实现更精细的调速。
2.5 通讯接口
- 芯片需要与微控制器或主控制系统进行通讯。常见的接口有:
- UART:常见且简单,适用于低复杂度通讯。
- SPI/I2C:适合速度更快且可靠性高的通讯。
- dshot/bdshot:通过Timer&DMA配置GPIO进行电机的控制和传感通信。
- CAN总线:用于需要抗干扰能力强、长距离传输的工业和无人机应用中。
- 选择芯片时,需根据具体应用选择合适的通讯接口。
2.6 保护功能
- 过压保护、过流保护、过热保护等功能是必要的,以确保电机和调速器在意外情况下不受损坏。
- 一些高端芯片可能还包括霍尔传感器故障检测和锁相保护,以增强系统的安全性和稳定性。
2.7 支持霍尔传感器与无传感器模式
- BLDC电机可以通过霍尔传感器进行位置检测,也可以采用无传感器模式(通过检测反电动势),从而无需额外的传感器。
- 确认芯片是否支持霍尔传感器模式、无传感器模式或两者皆有,以适应不同的电机配置需求。
2.8 集成度与外围器件
- 高度集成的芯片可能内置MOSFET驱动器、电流检测等功能,可以简化电路设计,减少外部元件。
- 低集成度芯片可能需要外部MOSFET和驱动器,设计复杂度增加,但可以提供更高的灵活性。
2.9 效率与散热
- 芯片的效率会直接影响调速器的散热性能。选择低导通损耗的芯片,减少功率消耗和热量生成。
- 在高功率应用中,确保芯片具备良好的散热管理,必要时设计带有散热片或风扇的系统。
2.10 市场供应与成本
- 确保选择的芯片有良好的市场供应链,避免出现长期供货不足或停产的情况。
- 成本与应用需求相匹配,对于大规模生产的应用场景,选择性价比高的芯片尤为重要。
3. 因素阐述
3.1 PWM工作频率
3.1.1 电机控制芯片
- 在芯片规格书的PWM控制部分,通常会列出芯片支持的PWM频率范围,即芯片可以产生的PWM信号频率。这一部分明确了芯片能否提供合适的频率,以控制BLDC电机的转速和扭矩。
- 该频率通常以单位kHz或Hz表示,例如:PWM频率范围:20kHz - 50kHz。
3.1.2 单片机算法
定时器(Timers)
- 很多调速器芯片通过定时器模块产生PWM信号。规格书中的定时器或计时器(Timers)部分会详细描述定时器的频率、时钟源及可配置的分辨率,这些特性决定了PWM信号的最高频率。
- 规格书中可能会描述定时器的频率范围和计数器的位数,这些参数决定了PWM频率的可调范围。比如定时器频率为100 MHz,16位分辨率的计数器可以生成1.5 kHz到几百kHz的PWM信号。
电机控制部分
- 如果软件算法用于电机控制,针对不同控制模式(如FOC或方波控制)和资源配置使用方式,通常固件会给出PWM工作频率范围。
3.2 单片机工作频率
在定时器频率为100 MHz、16位分辨率的情况下,PWM的最低频率为1.5 kHz,最高频率可以达到100 MHz。
这个计算过程基于定时器的频率、计数器的位数(分辨率)以及计数器溢出的时间,进而得到PWM信号的频率范围。下面是具体的计算步骤:
Step 1 定时器频率
- 假设定时器的时钟频率为 100 MHz,即:
f t i m e r = 100 MHz = 100 × 1 0 6 Hz f_{timer} = 100 \, \text{MHz} = 100 \times 10^6 \, \text{Hz} ftimer=100MHz=100×106Hz
Step 2 计数器位数
- 假设计数器的位数是 16位,即计数器可以从
0计数到2^{16} - 1,最大计数值为 65535。
N m a x = 2 16 − 1 = 65535 N_{max} = 2^{16} - 1 = 65535 Nmax=216−1=65535 - 这意味着,计数器在计满65536个时钟周期后,产生一个完整的PWM周期。
Step 3 PWM频率计算
PWM的周期与计数器的最大计数值和定时器频率有关,公式为:
f P W M = f t i m e r N f_{PWM} = \frac{f_{timer}}{N} fPWM=Nftimer
其中,N 是计数器的当前计数值(也称为周期寄存器的值)。为了计算PWM信号的频率范围,我们需要计算当 N 在最大和最小值时的频率。
Step 4 最大PWM周期(最低频率)
当计数器运行到最大值 N_{max} = 65535 时,PWM频率是最低的:
f P W M _ m i n = f t i m e r N m a x = 100 × 1 0 6 65535 ≈ 1525 Hz f_{PWM\_min} = \frac{f_{timer}}{N_{max}} = \frac{100 \times 10^6}{65535} \approx 1525 \, \text{Hz} fPWM_min=Nmaxftimer=65535100×106≈1525Hz
Step 5 最小PWM周期(最高频率)
当计数器运行到最小值 N = 1 时,PWM频率是最高的:
f P W M _ m a x = f t i m e r N = 100 × 1 0 6 1 = 100 kHz f_{PWM\_max} = \frac{f_{timer}}{N} = \frac{100 \times 10^6}{1} = 100 \, \text{kHz} fPWM_max=Nftimer=1100×106=100kHz
Step 6 PWM频率范围
因此,计数器从1到65535时,对应的PWM频率范围是:
f P W M ≈ 1.5 kHz 到 100 MHz f_{PWM} \approx 1.5 \, \text{kHz} \, \text{到} \, 100 \, \text{MHz} fPWM≈1.5kHz到100MHz
4. 考量范围
对于产品设计,我们首先要有一个大体的考量范围,用来甄别项目的难度和PRD中的描述错误,以便在设计规格需求对接的时候,进行相关技术澄清,避免设计需求源头错误导致“乌龙”。
注:因为关于PM的定义有很多:Project Manager/Product Manager/Product Coordinate Manager/Product Schedule Manager。通常对于领域或者产品一知半解的Product Manager,对于产品规格设设计规格是不会很清楚的,也不太有太多概念。此时,必须反复澄清确认。
4.1 外围规格
- 电池供电:电压范围
- 驱动电机:电压范围、最大持续电流、KV值、扭矩范围、工作频率
- 通讯接口:PWM/UART/dshot/bdshot/CAN/SPI/I2C
- 保护措施:过压保护、过流保护、过热保护
- 认真要求:FCC/CE/CCC/RoHS/UL/REACH/ISO 9001
4.2 量化规格
FPV ESC常规指标量化:
- 电压范围:3S(11.1V) ~ 8S(29.6)
- 持续电流:20A ~ 60A
- KV值:1500KV ~ 3000KV
- 扭矩范围:0.1Nm ~ 0.4Nm
- 工作频率:20kHz ~ 50kHz
- 通讯接口:UART/dshot/bdshot/ etc.
5. 实际设计
通常情况下,研发需要根据产品经历提供的PRD量化规格指标和设计指标来进行设计。
- 规格指标:产品说明书的参数
- 设计指标:公司内部明确产品设计的参数
在FPV ESC设计上,通常采用了单片机算法驱动控制的解决方案。因此,参数明确需要注意以下几点:
- 【MOSFET和三相驱动芯片手册】电压最大值:三相驱动芯片(一般问题不大)+大功率MOSFET
- 【MOSFET芯片手册】持续电流:大功率MOSFET
- 【MOSFET芯片手册】峰值电流:大功率MOSFET
- 【电机手册】KV值:一般问题不大
- 【电机手册】扭矩最大值:一般问题不大
- 【MOSFET芯片手册】效率与散热:通过 I 2 R I^2R I2R考虑是否增加散热(当芯片功耗超过 0.5W - 1W 时,通常开始考虑散热问题。这是经验值,具体的阈值取决于芯片材料、封装类型、散热路径等因素);另外,NTC电阻设计时,layout尽量摆放在热量最高的区域,以便在工程样品阶段进行实验验证。
- 【MCU芯片手册】工作频率:单片机(定时器,一般问题不大)
- 【固件功能列表】通讯接口:固件支持功能
其他细节:
- 过压保护、过流保护、过热保护:软硬件设计实现
- 支持霍尔传感器与无传感器模式:FPV ESC通常采用BEMF方式(无传感器模式)
- EMI设计考虑:若需要过认证,比如:FCC/CE等(这块内容实际硬件设计比较复杂,详见附录)
- 市场供应与成本:参照以往案例或者竞品规格进行比对
注:所有设计最终都是需要通过合理的实验步骤和量化数据做最终的研发论证,相关公式推演可以详见参考资料。
6. 参考资料
【1】无人机动力系统设计基础知识
【2】无人机动力系统设计之桨叶推力计算
【3】无人机动力系统设计之电调+电机关键参数推演
7. 附录
7.1 电调设计方案?
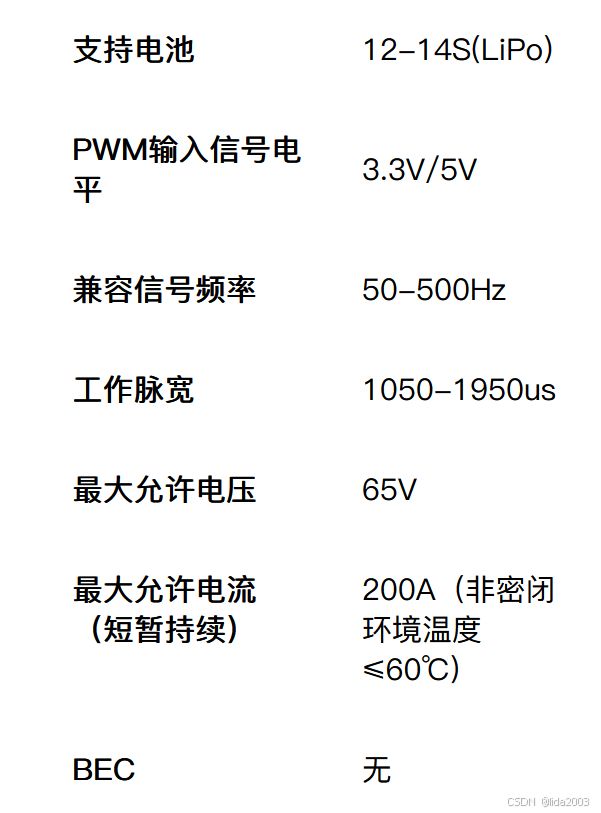
假设,我们需要设计一款ESC单体电调,大致产品规格如下:
请提供一份参考设计方案!回家作业???
7.2 EMI设计考虑?
电磁干扰(EMI,Electromagnetic Interference)是电子设备设计中需要重点考虑的问题,尤其是在FPV电机和**ESC(电子调速器)**等高频电子设备中。良好的EMI设计能够降低噪声干扰,保证系统稳定性,并且符合电磁兼容性(EMC,Electromagnetic Compatibility)标准。
总体方向,可以考虑以下几个方面(有一些软件设计方面可以参考AM32):
- 硬件方面:主要通过去耦电容、滤波器、电源层设计、屏蔽材料和合理的PCB布线来减少EMI。
- 布局与布线:优化走线、接地层和信号线隔离是控制EMI的重要步骤。
- 软件方面:可以通过PWM频率调节、软启动等方式减少瞬态干扰。
良好的EMI设计是硬件与软件相结合的过程,需要在设计初期就综合考虑多个因素,尤其在高速、功率设备如FPV电机和ESC的设计中尤为重要。
EMI 设计的基本原则
EMI设计要从辐射和传导两个主要方面进行考虑:
- 辐射干扰:由电缆、电路或天线等无意中作为天线发射的电磁波引起的干扰。
- 传导干扰:通过电源线或信号线传输的高频干扰信号,直接影响其他电子设备。
为了抑制EMI,需要从电路设计、布局布线、屏蔽和滤波等多个方面综合考虑。
- 电源设计和滤波
(1)电源去耦电容
- 在电源设计中,使用适当的去耦电容来抑制高频干扰,防止噪声从电源线传递到其他电路中。去耦电容通常位于电源和地之间,靠近电路的电源输入端。
(2)EMI滤波器
- 在电源输入端或信号线中加入EMI滤波器,以滤除传导的高频噪声。常用的滤波器包括:
- LC滤波器(电感-电容组合)
- π型滤波器(两个电容和一个电感)
(3)电源层和地层的设计
- 在PCB(印刷电路板)设计中,增加独立的电源层和接地层能够降低电磁干扰。大面积的接地层提供了低阻抗路径,有效减少了电源与信号之间的电磁耦合。
- PCB布局与布线
(1)信号线隔离
- 高速信号线(如PWM信号线)和功率线之间保持足够的物理距离,防止电磁耦合。信号线和电源线平行走线容易引发干扰,应尽量垂直走线。
(2)地线设计
- 单点接地或多点接地策略:重要电路使用单点接地,避免不同接地点间的电流流动产生噪声干扰。
- 信号回流路径:确保高速信号线有稳定的地回路,避免信号在回路上形成大的电流环路,降低辐射干扰。
(3)短路径和扇出设计
- 在高频电路中,保持信号路径最短,避免过长的走线带来额外的辐射干扰。同时,尽量减少信号线的分支,防止信号反射和串扰。
- 屏蔽措施
(1)电磁屏蔽
- 使用金属外壳或导电材料为电路板或敏感电路提供屏蔽,减少电路对外部电磁波的辐射或吸收。这种屏蔽通常用在ESC、FPV电机控制器和敏感的控制电子设备上。
(2)信号线屏蔽
- 对于敏感信号线,如I2C、UART、PWM线,使用屏蔽电缆(如带屏蔽层的绞线)可以有效减少外界电磁干扰。同时,将屏蔽层接地,以引导干扰信号流向地线。
- 噪声源管理
(1)电机与ESC的布置
- 无刷电机与ESC通常是高频噪声源。合理的布置方式可以避免这些噪声源对其他敏感设备(如飞控、电调)产生干扰。可以通过增加距离或者物理屏蔽来降低干扰。
(2)减小电感器的干扰
- 电机驱动电路中使用的电感元件是主要的EMI源。通过使用具有低辐射的磁芯材料、电感器封装和更高效的绕线技术,可以减少电感器对外界的干扰。
- 软件优化
(1)PWM频率的调整
- 适当提高PWM频率(如从20kHz提高到30kHz或更高)可以减少可听噪声和低频电磁干扰。然而,较高的PWM频率也可能增加高频EMI,因此需要权衡。
(2)软启动与软关断
- 在控制无刷电机的ESC中,通过软件实现软启动和软关断可以避免瞬态电流的剧烈变化,减少电流尖峰和辐射干扰。
- 差分信号传输
对于高速信号(如FPV的控制信号、数据线),采用差分信号传输能够有效减少电磁干扰。差分信号通过两条互为反向的信号线传输数据,能够很好地抵消外部电磁场的干扰。
7.3 认证介绍
不同的市场和应用领域可能需要不同的认证,具体的认证要求通常取决于产品的使用环境和目标市场。
-
CE认证(Conformité Européenne)
- 主要在欧洲市场要求,用于确认产品符合欧盟的健康、安全和环保法规。
-
FCC认证(Federal Communications Commission)
- 主要针对美国市场,确保电子产品在电磁兼容性(EMC)方面不会对其他设备产生有害干扰。
-
RoHS认证(Restriction of Hazardous Substances)
- 限制在电子产品中使用有害物质,特别是重金属。这是欧洲市场的一项要求,但全球许多市场都遵循该标准。
-
UL认证(Underwriters Laboratories)
- 美国的安全认证,确保电子设备符合安全标准,特别是在电气安全和防火性能方面。
-
ISO 9001认证
- 这是一个质量管理体系认证,确保制造商遵循良好的生产和管理流程,以生产出高质量的产品。
-
REACH认证(Registration, Evaluation, Authorization, and Restriction of Chemicals)
- 欧盟的化学品管理法规,确保产品中的化学成分是安全的,不对人体和环境造成危害。
-
CCC认证(China Compulsory Certification)
- 中国强制认证,确保电气产品符合中国的安全和质量要求。