STM32F4的电压实时检测
本人最近课程设计学习STM32F4系列,在此进行学习记录!本次记录完成的结课项目!
课程实训涉及STM32基本知识,GPIO,外部中断EXTI,串口USART,ADC以及DMA,最后贴有注解代码!
一、任务
A:按键控制ADC开始工作
B:通过旋转滑动变阻器改变电压,随着电压的不同,通过点亮LED灯发出警告,当电压达到最大值,蜂鸣器叫。
C:串口输出当前电压值。
二、过程
1、代码风格
考虑该项目相当于于之前的实验来说,体量更大,所以在编写代码的时候,分成了main函数,头文件,函数定义c文件三个部分。使代码更便于阅读与修改。在.h文件中对函数进行声明,在.c文件对所有函数进行定义。
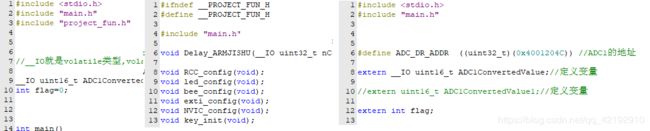
2、volatile类型理解
volatile是一个类型修饰符(type specifier),在库函数的代码中定义位“__IO”。volatile的作用是作为指令关键字,确保本条指令不会因编译器的优化而省略,且要求每次直接读值。
volatile的变量是说这变量可能会被意想不到地改变,这样,编译器就不会去假设这个变量的值了。
而在使用ADC读取实时读取电压值的时候就应该使用该类型。
3、小问题
1、串口中断标志
只需要发和收,所以在发的时候不需要中断否则会程序无功能。
2、外部变量的使用
应该在主函数中定义变量,然后在其他.c文件中使用extern来使用外部变量进行传参。否则会导致传参失败。
3、RCC的知识
在使用RCC时钟配置函数,应该在main函数中首先调用,否则会出错。
三、成果
圆满完成了项目要求。
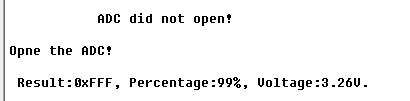
在对STM32复位后,初始化ADC是关闭的,串口打印出“ADC DID NOT OPEN”的信息。
当按下了WAKEUP KEY之后,通过外部中断EXTI响应打开了ADC,串口打印出“OPEN THE ADC”信息,并实时发送电压信息。
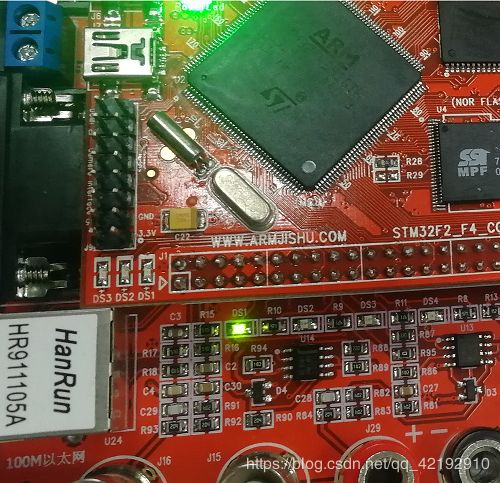
通过调节电位器旋钮进行LED灯的点亮,其中电压比小于25,点亮一盏灯;电压比小于50,点亮两盏灯;电压比小于75,点亮3盏灯,电压比大于75,四盏灯全亮,当电压比达到98及更高的时候,蜂鸣器鸣叫。
四、代码
1、main.c文件
#include 2、project_fun.h文件
#ifndef __PROJECT_FUN_H
#define __PROJECT_FUN_H
#include "main.h"
void Delay_ARMJISHU(__IO uint32_t nCount);
void RCC_config(void);
void led_config(void);
void bee_config(void);
void exti_config(void);
void NVIC_config(void);
void key_init(void);
void Res_config(void);
int fputc(int ch, FILE *f);
int fgetc(FILE *f);
void uart_config(void);
void usart_sendbyte(USART_TypeDef* USARTx,uint16_t ch);
void usart_sendstring(USART_TypeDef* USARTx,char * str);
void GPIO_config(void);
void ADC_Config(void);
void DMA_Configuration(void);
#endif
3、project_fun.c文件
#include