zynq pl配置linux中断
zynq pl配置linux中断
一、zynq工程如图所示
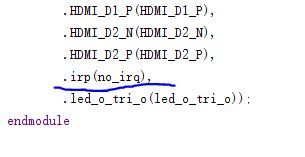
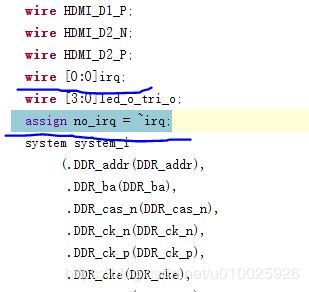
下图所示为zynq的pl工程图,请注意途中画蓝色框内,在图一左侧的蓝色框内,请在vivado约束条件中设置irq[0:0]与板子上的按键连接具体约束条件见。在右侧蓝框内的xlconcat_0中,由于In0[0:0]连接别的设备,In1[0:0]连接外部按键,故In0[0:0]的中断号为61,In1[0:0]的中断号为62。图二是将中断连接到zynq的IRQ_F2P[1:0]中。
图一:

图二:

二、zynq中断号的由来
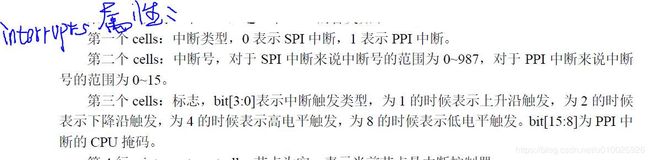
- Zynq的中断类型有:
软件中断(Software Generated Interrupt, SGI,中断号0-15)(16–26 reserved)
私有外设中断(Private Peripheral Interrupt, PPI,中断号27-31),
共享外设中断(Shared Peripheral Interrupt, SPI,中断号32-95). - 私有外设中断(PPI):每个CPU都有一组PPI,包括全局定时器、私有看门狗定时器、私有定时器和来自PL的FIQ/IRQ.
- 软件中断(SGI)被路由到一个或者两个CPU上,通过写ICDSGIR寄存器产生SGI.
- 共享外设中断(SPI)由PS和PL上的各种I/O控制器和存储器控制器产生,这些中断信号被路由的CPU.
- 通用中断控制器(GIC)是核心资源,用于集中管理从PS和PL产生的中断信号的资源集合。控制器可以使能、关使能、屏蔽中断源和改变中断源的优先级,并且会将中断送到对应的CPU中,CPU通过私有总线访问这些寄存器。
- 中断控制器(ICC,Interrupt Controller CPU)和中断控制器分配器(ICD, Interrupt Controller Distributor)是GIC寄存器子集。
- (外部)中断请求(IRQ)、快速中断请求(FIQ)。
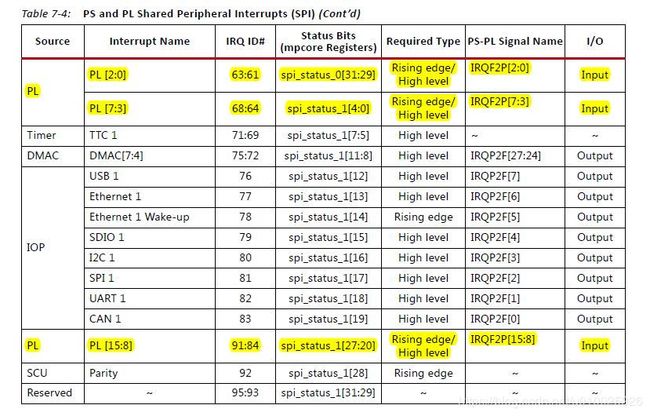
- a、对于非 SPI中断,则对应到Linux 的中断标号,为芯片datasheet的中断号 -16。
例如中断号为 30,则对应的linux 中断号为 30 -16 = 14。
b、对于SPI 中断,则对应的 linux 中断标号,为芯片 datasheet 的中断号 -32。
例如:IRQ_F2P中断,中断号为 61,则对应的 linux 中断号为 61 - 32 = 29。 - 总上所述,下图为u585-zynq的数据手册中截取的部分内容,详细信息请参考该数据手册,该表画黄色的区域标识pl的中断号。由于In0[0:0]在前,In1[0:0]在后,分配中断号的时候,In0[0:0]会被先分配,故之前提到的In0[0:0]为61,In1[0:0]为62。
三、vivado中约束条件
四、设备树内增加如下内容
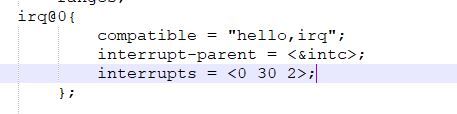
其中interrupts = <0 32 2>;内的0代表的是SPI中断,32对应的中断号,2代表中断触发方式为下降沿触发。触发方式一共有4中,分别是上升沿触发(1),下降沿触发(2),高电平触发(4),低电平触发(8)。
五、驱动代码
// An highlighted block
#include 六、应用代码
// An highlighted block
#include 七、后面讲介绍基于AXI_GPIO的pl中断
axi_gpio我已经学习了一段时间,由于对FPGA不是特别熟悉,所以走了一些弯路,后面写一些经验体会吧,希望能给大家有所帮助。