4.8 IFFT/FFT
4.8.1 IFFT/FFT原理

1. IFFT、FFT在OFDM系统中的应用
![]()

2、IFFT/FFT原理

 3、DIT的基2FFT算法
3、DIT的基2FFT算法


 4、DIF的基2FFT运算
4、DIF的基2FFT运算

 5、基于
5、基于![]() 的频率抽选FFT算法
的频率抽选FFT算法


4.8.2 基于![]() DIF FFT的硬件 结构
DIF FFT的硬件 结构

1、各级的蝶形运算硬件实现
2、transfer12、 transfer34、transfer56硬件实现

3、transfer23、 transfer45硬件实现

4.8.3 运用IP Core实现IFFT/FFT








matlab
matlab:
function [data_out]=ifft_64(data_in,NumCarrier)
%ifft变换
%data_in为经过bpsk,qpsk,QAM16,QAM64星座映射后的复数信号
%NumCarrier为子载波数量,也即ifft变换长度
LengthSymbol=length(data_in)/NumCarrier;
data_out=zeros(1,length(data_in));
%IFFT处理,ifft函数将进行除以NumCarrier,也即64的因子
%根据硬件设计,ifft的系统缩放比例应设为2+3+2-3位为最好,三级蝶形运算,分别右移2/3/2位,然后为了不影响DAC精度,对输入信号放大左移3位
%故我们对ifft进行6-(2+3+2-3)=2,也即乘以4的处理,得到的幅值刚好在-1---1区间//???
for k=1:LengthSymbol
data_out((k-1)*NumCarrier+1:k*NumCarrier)=ifft(data_in((k-1)*NumCarrier+1:k*NumCarrier))*4;
end暂时不太会用;其实不用看,后来发现变换过程中数据会或多或少丢失,因为matalb采用的是浮点运算,fpga采用的是定点运算测试方案采用:fpgaIFFT变换后的数据,与原数据matlab仿真数据的对比,下面是程序:
时钟模块clk20M-clk60M:
//clk20M-clk60M
module change60(clk20M,clk60M,reset,inEn,outEn,dataInR,dataInI,dataOutR,dataOutI,FFT_set);
input clk20M;
input clk60M;
input reset;
input inEn;
input [7:0]dataInR;
input [7:0]dataInI;
output outEn;
output [7:0]dataOutR;
output [7:0]dataOutI;
output FFT_set;
wire [7:0]dataOutR;
wire [7:0]dataOutI;
reg [7:0]dataInR_buf;
reg [7:0]dataInI_buf;
reg En;
wire clk60M;
always @(posedge clk20M or negedge reset)
begin
if(!reset)
begin
En<=0;
dataInR_buf<=0;
dataInI_buf<=0;
end
else
begin
if(inEn)
begin
dataInR_buf<=dataInR;
dataInI_buf<=dataInI;
En<=1;
end
else
begin
dataInR_buf<=8'b0;
dataInI_buf<=8'b0;
En<=0;
end
end
end
reg mode;
reg [7:0] k;
//以clk20M的写信号
always @(posedge clk20M or negedge reset)
begin
if(!reset)
begin
k<=0;
end
else
begin
if(En)
begin
if(k==63)
k<=0;
else
k<=k+1;
end
end
end
reg [7:0] r;
reg outEn;
reg FFT_set;
reg [7:0] t;
//以clk60M的读信号
always @(posedge clk60M or negedge reset)
begin
if(!reset)
begin
r<=0;
mode<=0;
FFT_set<=0;
outEn<=0;
t<=0;
end
else begin
if(En)
begin
if(r==8'b10111010)
begin
FFT_set<=1; // output FFT_set 6 clock cycle before dataOut
r<=r+1;
end
else if(r==8'b10111100)
begin
outEn<=1; //output outEn 4 clock cycle before dataOut
r<=r+1;
end
else if(r==8'd191)
begin
mode<=1;
r<=0;
end
else begin
r<=r+1;
FFT_set<=0;
outEn<=0;
end
end
else r<=0;
if(mode)
begin
if(t==63)
begin
t<=0;
mode<=0;
end
else t<=t+1;
end
end
end
//实部
rami ramr ( //BRAM for real part: input 20MHz, output 60MHz, depth 64 bytes
.a(k),
.dpra(t),
.clk(clk20M),
.qdpo_clk(clk60M),
.d (dataInR_buf),
.qdpo(dataOutR),
.qdpo_ce(mode),
.we(En));
//虚部
rami rami ( //BRAM for image part: input 20MHz, output 60MHz, depth 64 bytes
.a(k),
.dpra(t),
.clk(clk20M),
.qdpo_clk(clk60M),
.d (dataInI_buf),
.qdpo(dataOutI),
.qdpo_ce(mode),
.we(En));
endmodule时钟模块的测试:
for (j=0;j<=3;j=j+1)
begin
#200
inEn=1;
for (i=0;i<64;i=i+1)
begin
#54
dataInR = {$random}%8;
dataInI = {$random}%8;
end
i=0;
inEn=0;
end
j=0;时钟模块的波形:

change_60:

从现在看来完全正确:但是下一级IFFT IP的复位、开始时钟时序不太明白;继续做。。。

左移三位,八倍的关系;
先做一下原数据与原数据*3后傅里叶变换的对比:
原数据:实部:0 0 1 1 2 2 3 3 4 4 5 5 6 6 7 7 7 7 6 6 5 5 4 4 3 3 2 2 1 1 0 0
0 0 1 1 2 2 3 3 4 4 5 5 6 6 7 7 7 7 6 6 5 5 4 4 3 3 2 2 1 1 0 0
虚部:0
扩大三倍后输出的数据:
xk_re:0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -788 -3 -24 2 -52 -11 -19 -2 -2 -19 -11 -52 2 -24 -3 -788 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
xk_im:0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -239 -2 78 4 -63 -1 16 21 -21 -21 -16 1 63 -4 -78 2 239 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
fft_burst:
module fft_Burst(bitInR,bitInI,inEn,FFT_set,Gclk,rst_n,dv,
bitOutR,bitOutI,outEn);
input [7:0] bitInR;
input [7:0] bitInI;
input inEn;
input FFT_set;
input Gclk;
input rst_n;
output [7:0] bitOutR;
output [7:0] bitOutI;
output outEn;
output dv;
//////////////////////////////////////////////////////////////////////////////////////////////////////
reg [15:0] cnt=0;
reg s_axis_config_tvalid;
reg s_axis_data_tvalid;
reg s_axis_data_tlast;
wire m_axis_data_tvalid;
wire s_axis_data_tready;
//wire m_axis_data_tuser;
reg ctrl_we;
//////////////////////////////////////////////////////////////////////////////////////////////////////
reg start; //start ip core, enable for 1 cycle high. 4 cycles before input data
reg [15:0] xn_re; //input real part register for ip core
reg [15:0] xn_im; //input image part register for ip core
reg [7:0] bitOutR; //output real part register
reg [7:0] bitOutI; //output image part register
reg outEn; //synchronize with output, as handshake with next module
reg [5:0] xn_index; //index of input for ip core
wire clr;
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
assign clr=rst_n; //reset of ip core, enable under high level
/***************************************************************************/
////////////////////////////////////IP时序//////////////////////////////////////
always @(posedge Gclk)
begin
if(clr)
begin
cnt <= cnt + 1'b1;
if(start)
begin
s_axis_data_tvalid <=1;
cnt <= 0;
end
else if(cnt == 16'd62)
begin
s_axis_data_tlast <= 1'b1;
end
else if(cnt == 16'd63)
begin
s_axis_data_tvalid <= 1'b0;
s_axis_data_tlast <= 1'b0;
end
end
end
/******************** Set and control FFT *********************************/
always @ (negedge rst_n or posedge Gclk)
if (!rst_n) //Initialize IP core
begin
start<=1'b0;
ctrl_we<=1'b0;
s_axis_config_tvalid<=1'b0;
s_axis_data_tvalid <= 0;
s_axis_data_tlast <= 0;
xn_re<=16'h0000;
xn_im<=16'h0000;
end
else
begin
if (FFT_set) //if FFT_set is high, enable all write control signals
begin
ctrl_we<=1'b1;
s_axis_config_tvalid <=1'b1;
end
if (inEn) //if inEn is high, enable start and disable all write control signals
begin
start<=1'b1;
ctrl_we<=1'b0;
s_axis_config_tvalid <=1'b0;
end
else
start<=1'b0;
if (s_axis_data_tvalid) //If new data is high, input data.
begin
// xn_re[10:3]<=bitInR; //The input of IP core is 16 bit. notice the high bits which indicate sign of data
// xn_re[11]<=bitInR[7];
// xn_re[12]<=bitInR[7];
// xn_re[13]<=bitInR[7];
// xn_re[14]<=bitInR[7];
// xn_re[15]<=bitInR[7];
// xn_im[10:3]<=bitInI; //we enlarge the input data by 8 times
// xn_im[11]<=bitInI[7];
// xn_im[12]<=bitInI[7];
// xn_im[13]<=bitInI[7];
// xn_im[14]<=bitInI[7];
// xn_im[15]<=bitInI[7];
xn_re[7:0]<=bitInR; //The input of IP core is 16 bit. notice the high bits which indicate sign of data
xn_re[8]<=bitInR[7];
xn_re[9]<=bitInR[7];
xn_re[10]<=bitInR[7];
xn_re[11]<=bitInR[7];
xn_re[12]<=bitInR[7];
xn_re[13]<=bitInR[7];
xn_re[14]<=bitInR[7];
xn_re[15]<=bitInR[7];
xn_im[7:0]<=bitInI; //we enlarge the input data by 8 times
xn_im[8]<=bitInI[7];
xn_im[9]<=bitInI[7];
xn_im[10]<=bitInI[7];
xn_im[11]<=bitInI[7];
xn_im[12]<=bitInI[7];
xn_im[13]<=bitInI[7];
xn_im[14]<=bitInI[7];
xn_im[15]<=bitInI[7];
end
else
begin
xn_re<=16'h0000;
xn_im<=16'h0000;
end
end
/********************************************************************/
/******************** FFT ip core *********************************/
wire [15:0] xk_re;
wire [15:0] xk_im;
always @(negedge rst_n or posedge Gclk)
begin
if(rst_n)
begin
if(s_axis_data_tvalid)
xn_index <= xn_index +1;
end
end
/***************************************************************************/
/******************** IFFT output *********************************/
always @ (negedge rst_n or posedge Gclk)
if (!rst_n)
begin
outEn<=1'b0;
end
else
begin
if (m_axis_data_tvalid) //If dv is enable, output data's lowest 8 bits.
begin
outEn<=1'b1;
end
else
begin
outEn<=1'b0;
end
end
always @ (negedge rst_n or posedge Gclk)
if (!rst_n)
begin
bitOutR<=16'h00;
bitOutI<=16'h00;
end
else
begin
if (outEn) //If dv is enable, output data's lowest 8 bits.
begin
bitOutR <= xk_re[7:0];
bitOutI <= xk_im[7:0];
end
else
begin
bitOutR<=8'h00;
bitOutI<=8'h00;
end
end
fft_text fft_text_inst(
.aclk(Gclk),
.aresetn(clr),
.ctrl_we(ctrl_we),
.xn_im(xn_im),
.xn_re(xn_re),
.s_axis_data_tvalid(s_axis_data_tvalid),
.s_axis_data_tlast(s_axis_data_tlast),
.s_axis_config_tvalid(s_axis_config_tvalid),
.s_axis_data_tready(s_axis_data_tready),
.xk_im(xk_im),
.xk_re(xk_re),
.m_axis_data_tvalid(m_axis_data_tvalid)
);
endmodulefft_text:
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer:
//
// Create Date: 2018/12/10 17:16:18
// Design Name:
// Module Name: xfft_64text
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
module fft_text(
input aclk,
input aresetn,
input [15:0] xn_im,
input [15:0] xn_re,
input s_axis_data_tvalid,
input s_axis_data_tlast,
input s_axis_config_tvalid,
input ctrl_we,
// output reg [15:0] xn_index,
output s_axis_data_tready,
output [15:0] xk_im,
output [15:0] xk_re,
// output [15:0] m_axis_data_tuser,
output m_axis_data_tvalid
);
reg [7:0] s_axis_config_tdata;
wire [31:0] m_axis_data_tdata;
wire [15:0] m_axis_data_tuser;
wire m_axis_data_tlast;
wire s_axis_config_tready;
wire event_frame_started;
wire event_tlast_unexpected;
wire event_tlast_missing;
wire event_status_channel_halt;
wire event_data_in_channel_halt;
wire event_data_out_channel_halt;
wire [31:0] s_axis_data_tdata = {xn_im,xn_re};
assign {xk_im,xk_re} = m_axis_data_tdata;
always @(posedge aclk or negedge aresetn)
begin
if(!aresetn)
begin
s_axis_config_tdata <= 8'b0;
end
else
begin
if(ctrl_we)
s_axis_config_tdata <= 8'b1011100;
end
end
xfft_64 usr_FFT(
.aclk(aclk),
.aresetn(aresetn),
.s_axis_config_tdata(s_axis_config_tdata),
.s_axis_config_tvalid(s_axis_config_tvalid),
.s_axis_config_tready(s_axis_config_tready),
.s_axis_data_tdata(s_axis_data_tdata),
.s_axis_data_tvalid(s_axis_data_tvalid),
.s_axis_data_tready(s_axis_data_tready),
.s_axis_data_tlast(s_axis_data_tlast),
.m_axis_data_tdata(m_axis_data_tdata),
.m_axis_data_tuser(m_axis_data_tuser),
.m_axis_data_tvalid(m_axis_data_tvalid),
.m_axis_data_tready(1'b1),
.m_axis_data_tlast(m_axis_data_tlast),
.event_frame_started(event_frame_started),
.event_tlast_unexpected(event_tlast_unexpected),
.event_tlast_missing(event_tlast_missing),
.event_status_channel_halt(event_status_channel_halt),
.event_data_in_channel_halt(event_data_in_channel_halt),
.event_data_out_channel_halt(event_data_out_channel_halt)
);
endmodule
change20:
//clk60M写clk20M读
module channge20(clk20M,clk60M,reset,inEn,outEn,dataInR,dataInI,dataOutR,dataOutI,bitIndexOut);
input clk20M;
input clk60M;
input reset;
input inEn;
input [7:0]dataInR;
input [7:0]dataInI;
output outEn;
output [7:0]dataOutR;
output [7:0]dataOutI;
output [5:0] bitIndexOut;
reg [5:0] bitIndexOut;
wire [7:0]dataOutR;
wire [7:0]dataOutI;
reg [7:0]dataInR_buf;
reg [7:0]dataInI_buf;
reg En;
wire clk60M;
always @(posedge clk60M or negedge reset)
begin
if(!reset)
begin
En<=0;
dataInR_buf<=0;
dataInI_buf<=0;
end
else begin
if(inEn)
begin
dataInR_buf<=dataInR;
dataInI_buf<=dataInI;
En<=1;
end
else begin
dataInR_buf<=0;
dataInI_buf<=0;
En<=0;
end
end
end
reg mode;
reg [7:0] k;
//clk60M64涓暟鎹啓鍏?
always @(posedge clk60M or negedge reset)
begin
if(!reset)
begin
k<=0;
end
else begin
if(En)
begin
if(k==63)
k<=0;
else
k<=k+1;
end
end
end
reg [7:0] r;
reg modetemp;
reg [1:0] cont;
always @(posedge clk60M or negedge reset)
begin
if(!reset)
begin
r<=0;
modetemp<=0;
end
else begin
if(En)
begin
if(r==63)
begin
modetemp<=1;
r<=0;
end
else
begin
r<=r+1;
modetemp<=0;
end
end
else
begin
r<=0;
modetemp<=0;
end
end
end
always @(posedge clk60M or negedge reset)
begin
if(!reset)
begin
cont<=2'b0;
mode<=0;
end
else
begin
if (cont==2'b11)
begin
mode<=0;
cont<=0;
end
else if (modetemp)
begin
mode<=1;
cont<=cont+1;
end
else
begin
if(mode)
cont<=cont+1;
else
cont<=0;
end
end
end
reg [7:0] t;
reg outEn;
reg flag;
//clk20M 64涓暟鎹鍙?
always @(posedge clk20M or negedge reset)
begin
if(!reset)
begin
t<=0;
outEn<=0;
flag<=0;
end
else begin
if(mode)
begin
flag<=1;
end
if(flag)
begin
outEn<=1;
if(t==63)
begin
t<=0;
flag<=0;
end
else t<=t+1;
end
else outEn<=0;
end
end
always @(posedge clk20M or negedge reset)
begin
if(!reset)
bitIndexOut<=0;
else
bitIndexOut<=t;
end
wire dpo;
data_rom dataromr ( //BRAM for real part: input 60MHz, output 20MHz, depth 64 bytes
.a(k),
.dpra(t),
.clk(clk60M),
.qdpo_clk(clk20M),
.d(dataInR_buf),
.qdpo(dataOutR),
.qdpo_ce(flag),
.we(En),
.dpo(dpo));
data_rom dataromi ( //BRAM for image part: input 60MHz, output 20MHz, depth 64 bytes
.a(k),
.dpra(t),
.clk(clk60M),
.qdpo_clk(clk20M),
.d(dataInI_buf),
.qdpo(dataOutI),
.qdpo_ce(flag),
.we(En),
.dpo(dpo));
endmodule
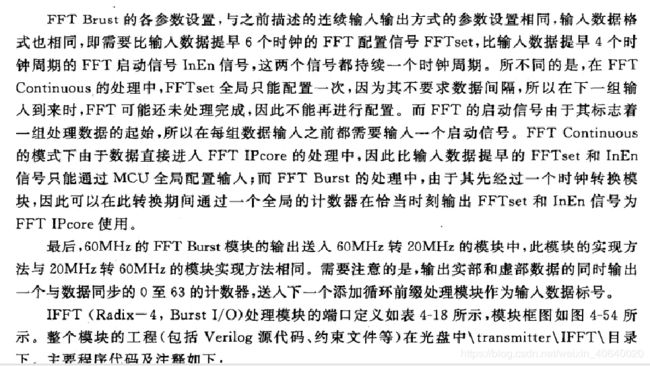
matlab仿真验证程序:
clear;
file_name='C:/Users/lyw/Desktop/fsave.txt';
fid = fopen(file_name,'r');
c = fscanf(fid,'%d');
fclose(fid);
%有符号数
for i=1: length(c)
if(c(i)>200)
b(i) = c(i)-256;
else b(i) = c(i);
end
end
d1=b(1:2:end);
d2=b(2:2:end);
comp1=d1(1:64) + j*d2(1:64);
comp2=d1(65:128) + j*d2(65:128);
%comp2=comp2/3;
c1avr=sum(comp1)/length(comp1);
c1=comp1-c1avr;
% c1=comp1;
c1fft=abs(ifft(c1,64));
c2fft=abs(comp2);
plot(c1);
figure
subplot(2,1,1);
plot(c1fft);
subplot(2,1,2);
plot(c2fft);
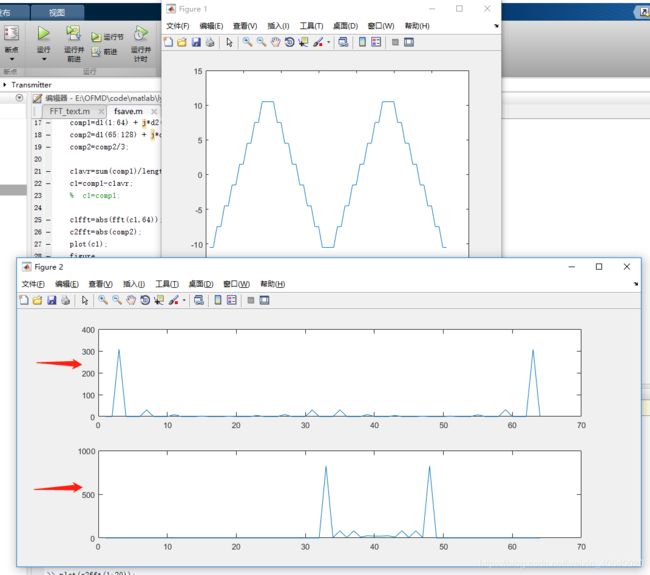
figure
subplot(2,1,1);
plot(c1fft(1:20));
subplot(2,1,2);
plot(c2fft(1:20));
tb:
`timescale 1ns/1ns
module IFFT_tb();
reg clk20M;
reg clk60M;
reg rst_n;
reg inEn;
reg [7:0] dat_c;
wire [7:0]dataInR;
wire [7:0]dataInI;
wire outEn;
wire [7:0]dataOutR;
wire [7:0]dataOutI;
wire [5:0] bitIndex;
IFFT IFFT_inst(
.clk20M(clk20M),
.clk60M(clk60M),
.rst_n(rst_n),
.inEn(inEn),
.dataInR(dataInR),
.dataInI(dataInI),
.outEn(outEn),
.dataOutR(dataOutR),
.dataOutI(dataOutI),
.bitIndex(bitIndex));
integer i=0;
integer j=0;
integer handle1;
initial
begin//sequence block
handle1 =$fopen("C:/Users/lyw/Desktop/fsave.txt");
#200000 $fclose(handle1);
$stop;
end
initial begin
clk20M=0;
clk60M=0;
rst_n=0;
inEn=0;
dat_c = 8'b0;
// dataInR=8'b00000000;
// dataInI=8'b00000000;
#200
rst_n=1;
inEn=1;
for (i=0;i<64;i=i+1)
begin
#60
dat_c <=(dat_c + 4'b1000);
end
inEn=0;
end
always @(posedge clk20M)
begin
if(inEn)
$fwrite(handle1,"%d %d \n",dataInR,dataInI);
else if(outEn)
$fwrite(handle1,"%d %d \n",dataOutR,dataOutI);
end
assign dataInR ={13'b0,{dat_c[7]? ~dat_c[7:4] : dat_c[7:4]}};
assign dataInI =0;
always #30 clk20M = ~clk20M;
always #10 clk60M = ~clk60M;
endmodule在验证过程中出现的问题:
问题1、设置IP疏忽,未顺序输出;
除了幅度不同,还有感觉是在x方向上缩小了;寻找原因中。。。。。在后续的学习过程中,发现设置IP的时候没有选择顺序输出;

output [7 : 0] m_axis_data_tuser,设置为自动scaling时,该端口表示该次转换的截位(压缩倍数);如果scaling不是自动,那么不会有该信号;该信号在一帧数据的整个时间段内都有效;
问题二:采样时钟问题,部分数据丢失;



笔者发现,单独IP采样周期为20ns,而工程的IP为16ns,可能采样时间太短,造成了数据的丢失,把工程IP的数据改为20ns一周期,发现数据的波形基本一致,幅度上会有差异,下面致力于解决幅值上的差异和第一个转换数据的不准确性;
问题3:添加outEn,晚m_axis_data_tvalid一个时钟周期有效;
对整个工程进行测试:
发现处理第一个数,所有都正确;此时没有考虑扩大三倍; 幅值fpga大了1.5倍;

等到后面考虑到ADC转换精度的时候在考虑放大倍数的问题;程序控制如下:

此时考虑到三级蝶形运算的放大倍数,设置 s_axis_config_tdata <= 8'b1011100; scale=101110;进行逆运算;
还是要解决第一个数据不对的问题呀。。。。

后面对输出数据延迟一个时钟周期,fpga输出数据与matlab仿真数据完全吻合,幅度扩大了100倍;基本正确!
总结:fpga IFFT变换输出数据比实际变换后的数据扩大了100倍;(后面根据ADC转换精度决定)输入到IP的数据未经过放大,scale=101110;