基于51单片机智能红外温控风扇设计
1、设计需求及目标
本产品采用单片机+最小系统+数码管显示模块+数码管驱动模块+温度采集模块+人体感应模块+风扇模块+按键模块等构成;
功能描述:
(1)采用DS18B20温度传感器测温,人体感应模块检测是否有人。
(2)共3个按键:1键切换/设置、2键加、3键减。
(3)本设计共三种模式:自动模式、手动模式和自然风模式。
(4)自动模式,按一下1键可以设置温度上限,再按下设置温度下限,均可以按键加减调整。数码管第一位不显示,后三位显示温度值。人体感应模块检测有人时,温度小于下限风扇不转,温度在上下限之间50%转动,大于上限时,风扇全速转动。人离开后,延迟几秒风扇停止转动,起到节能环保的作用。
(5)手动模式,数码管第一位显示风扇档位,后三位显示温度,按2键/3键加减风扇的档位(1、2、3档)。
(6)自然风模式,数码管第一位显示“b”,后三位显示温度,此模式下风扇转动与温度无关,只要人体感应模块检测到有人,就会模拟自然风转动风扇,时快时慢,吹着更舒适;人离开后延迟几秒,风扇停止转动。
2、设计思路及方案
(1)控制芯片选择
以单片机作为控制器,通过编写程序不但能将传感器感测到的温度通过显示电路显示出来,而且用户能通过键盘接口,自由设置上下限动作温度值,满足全方位的需求。并且通过程序判断温度具有极高的精准度,能精确把握环境温度的微小变化。
(2)温度传感器的选择
数字式集成温度传感器DS18B20高度集成化,大大降低了外接放大转换等电路的误差因素,温度误差很小,并且由于其感测温度的原理与上述两种方案的原理有着本质的不同,使得其温度分辨力极高。温度值在器件内部转换成数字量直接输出,简化了系统程序设计,又由于该传感器采用先进的单总线技术(1-WRIE),与单片机的接口变的非常简洁,抗干扰能力强。
(3)显示电路选择
采用五位共阳数码管显示温度,动态扫描显示方式,显示温度明确醒目,在夜间也能看见,功耗极低,显示驱动程序的编写也相对简单,这种显示方式得到广泛应用。
(4)调速方式
采用晶闸管构成无级调速电路。以电位器控制晶闸管的导通角大小,可实现由最大风速到关闭的无级别调速,可将风力调节在关闭无风到最大风之间的任意风力,实现“自由风”。
(5)控制方式
采用继电器,继电器的接有控制晶闸管导通角的电阻的接入电路与否由单片机控制,根据当前温度值在相应管脚送出高/低电平,决定某个继电器的导通角控制电阻是否接入电路。

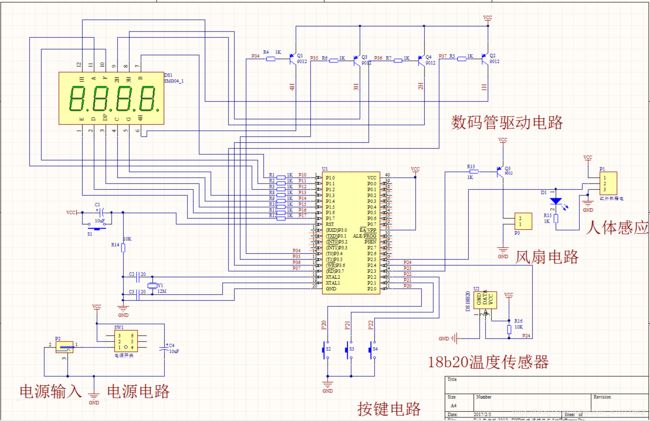
3、硬件电路
4、部分代码
#include //调用单片机头文件
#define uchar unsigned char //无符号字符型 宏定义 变量范围0~255
#define uint unsigned int //无符号整型 宏定义 变量范围0~65535
//数码管段选定义 0 1 2 3 4 5 6 7 8 9
uchar code smg_du[]={0x28,0xe4,0x42,0x72,0xe5,0xa8,0x41,0x77,0x20,0xa0,
0x60,0x25,0x39,0x26,0x31,0x71,0xff}; //断码
//数码管位选定义
uchar code smg_we[]={0xef,0xdf,0xbf,0x7f};
uchar dis_smg[4] = {0};
uchar smg_i = 3; //显示数码管的个位数
sbit dq = P2^4; //18b20 IO口的定义
sbit hw = P2^5;
uchar miao = 30;
uchar flag_en;
bit flag_lj_en; //按键连加使能
bit flag_lj_3_en; //按键连3次连加后使能 加的数就越大了
uchar key_time,key_value; //用做连加的中间变量
bit key_500ms ;
sbit pwm = P2^3;
uchar f_pwm_l ; //越小越慢
uint temperature ; //
bit flag_200ms ;
uchar menu_1; //菜单设计的变量
uint t_high = 250,t_low = 200; //温度上下限值
/***********************1ms延时函数*****************************/
void delay_1ms(uint q)
{
uint i,j;
for(i=0;i= smg_i)
i = 0;
P1 = 0xff; //消隐
P3 = smg_we[i]; //位选
P1 = dis_smg[i]; //段选
}
/***********************18b20初始化函数*****************************/
void init_18b20()
{
bit q;
dq = 1; //把总线拿高
delay_uint(1); //15us
dq = 0; //给复位脉冲
delay_uint(80); //750us
dq = 1; //把总线拿高 等待
delay_uint(10); //110us
q = dq; //读取18b20初始化信号
delay_uint(20); //200us
dq = 1; //把总线拿高 释放总线
}
/*************写18b20内的数据***************/
void write_18b20(uchar dat)
{
uchar i;
for(i=0;i<8;i++)
{ //写数据是低位开始
dq = 0; //把总线拿低写时间隙开始
dq = dat & 0x01; //向18b20总线写数据了
delay_uint(5); // 60us
dq = 1; //释放总线
dat >>= 1;
}
}
/*************读取18b20内的数据***************/
uchar read_18b20()
{
uchar i,value;
for(i=0;i<8;i++)
{
dq = 0; //把总线拿低读时间隙开始
value >>= 1; //读数据是低位开始
dq = 1; //释放总线
if(dq == 1) //开始读写数据
value |= 0x80;
delay_uint(5); //60us 读一个时间隙最少要保持60us的时间
}
return value; //返回数据
}
/*************读取温度的值 读出来的是小数***************/
uint read_temp()
{
uint value;
uchar low; //在读取温度的时候如果中断的太频繁了,就应该把中断给关了,否则会影响到18b20的时序
init_18b20(); //初始化18b20
write_18b20(0xcc); //跳过64位ROM
write_18b20(0x44); //启动一次温度转换命令
delay_uint(50); //500us
init_18b20(); //初始化18b20
write_18b20(0xcc); //跳过64位ROM
write_18b20(0xbe); //发出读取暂存器命令
low = read_18b20(); //读温度低字节
value = read_18b20(); //读温度高字节
value <<= 8; //把温度的高位左移8位
value |= low; //把读出的温度低位放到value的低八位中
value *= 0.625; //转换到温度值 小数
return value; //返回读出的温度 带小数
}
/*************定时器0初始化程序***************/
void time_init()
{
EA = 1; //开总中断
TMOD = 0X21; //定时器0、定时器1工作方式1
ET0 = 1; //开定时器0中断
TR0 = 1; //允许定时器0定时
ET1 = 1; //开定时器0中断
TR1 = 1; //允许定时器0定时
}
/********************独立按键程序*****************/
uchar key_can; //按键值
void key() //独立按键程序
{
static uchar key_new;
key_can = 20; //按键值还原
P2 |= 0x07;
if((P2 & 0x07) != 0x07) //按键按下
{
if(key_500ms == 1) //连加
{
key_500ms = 0;
key_new = 1;
}
delay_1ms(1); //按键消抖动
if(((P2 & 0x07) != 0x07) && (key_new == 1))
{ //确认是按键按下
key_new = 0;
switch(P2 & 0x07)
{
case 0x06: key_can = 1; break; //得到k2键值
case 0x04: key_can = 2; break; //得到k3键值
case 0x02: key_can = 3; break; //得到k4键值
}
flag_lj_en = 1; //连加使能
}
}
else
{
if(key_new == 0)
{
key_new = 1;
flag_lj_en = 0; //关闭连加使能
flag_lj_3_en = 0; //关闭3秒后使能
key_value = 0; //清零
key_time = 0;
key_500ms = 0;
}
}
}
/****************按键处理数码管显示函数***************/
void key_with()
{
if(key_can == 1) //设置键
{
f_pwm_l = 30;
menu_1 ++;
if(menu_1 >= 3)
{
menu_1 = 0;
smg_i = 3; //数码管显示3位
}
}
if(menu_1 == 1) //设置高温
{
smg_i = 4; //数码管显示4位
if(key_can == 2)
{
if(flag_lj_3_en == 0)
t_high ++ ; //按键按下未松开自动加三次
else
t_high += 10; //按键按下未松开自动加三次之后每次自动加10
if(t_high > 990)
t_high = 990;
}
if(key_can == 3)
{
if(flag_lj_3_en == 0)
t_high -- ; //按键按下未松开自动减三次
else
t_high -= 10; //按键按下未松开自动减三次之后每次自动减10
if(t_high <= t_low)
t_high = t_low + 1;
}
dis_smg[0] = smg_du[t_high % 10]; //取小数显示
dis_smg[1] = smg_du[t_high / 10 % 10] & 0xdf; //取个位显示
dis_smg[2] = smg_du[t_high / 100 % 10] ; //取十位显示
dis_smg[3] = 0x64; //H
}
if(menu_1 == 2) //设置低温
{
smg_i = 4; //数码管显示4位
if(key_can == 2)
{
if(flag_lj_3_en == 0)
t_low ++ ; //按键按下未松开自动加三次
else
t_low += 10; //按键按下未松开自动加三次之后每次自动加10
if(t_low >= t_high)
t_low = t_high - 1;
}
if(key_can == 3)
{
if(flag_lj_3_en == 0)
t_low -- ; //按键按下未松开自动减三次
else
t_low -= 10; //按键按下未松开自动加三次之后每次自动加10
if(t_low <= 10)
t_low = 10;
}
dis_smg[0] = smg_du[t_low % 10]; //取小数显示
dis_smg[1] = smg_du[t_low / 10 % 10] & 0xdf; //取个位显示
dis_smg[2] = smg_du[t_low / 100 % 10] ; //取十位显示
dis_smg[3] = 0x3D; //L
}
}
/****************风扇控制函数***************/
void fengshan_kz()
{
if(flag_en == 1)
{
if(temperature >= t_high) //风扇全开
{
TR1 = 1;
pwm = 0;
}
else if((temperature < t_high) && (temperature >= t_low)) //风扇缓慢
{
f_pwm_l = 60;
TR1 = 1;
}
else if(temperature < t_low) //关闭风扇
{
TR1 = 0;
pwm = 1;
}
}
}
/****************主函数***************/
void main()
{
static uchar value;
time_init(); //初始化定时器
while(1)
{
key(); //按键程序
if(key_can < 10)
{
key_with(); //设置温度
}
if(flag_200ms == 1) //200ms 处理一次温度程序
{
flag_200ms = 0;
temperature = read_temp(); //先读出温度的值
if(menu_1 == 0)
{
smg_i = 3;
dis_smg[0] = smg_du[temperature % 10]; //取温度的小数显示
dis_smg[1] = smg_du[temperature / 10 % 10] & 0xdf; //取温度的个位显示
dis_smg[2] = smg_du[temperature / 100 % 10] ; //取温度的十位显示
}
fengshan_kz(); //风扇控制函数
value ++;
if(value >= 4)
{
value = 0;
if(miao != 0)
{
miao --; //时间减1
}
if(miao == 0)
flag_en = 0;
}
if(hw == 1) //感应到人
{
miao = 30;
flag_en = 1;
}
}
display(); //数码管显示函数
}
}
/*************定时器0中断服务程序***************/
void time0_int() interrupt 1
{
static uchar value; //定时2ms中断一次
TH0 = 0xf8;
TL0 = 0x30; //2ms
value++;
if(value >= 150)
{
value = 0;
flag_200ms = 1;
}
if(flag_lj_en == 1) //按下按键使能
{
key_time ++;
if(key_time >= 250) //500ms
{
key_time = 0;
key_500ms = 1; //500ms
key_value ++;
if(key_value > 3)
{
key_value = 10;
flag_lj_3_en = 1; //3次后1.5秒连加大些
}
}
}
}
/*******************定时器1用做单片机模拟PWM 调节***********************/
void Timer1() interrupt 3 //调用定时器1
{
static uchar value_l;
TH1=0x0f; // 定时中断一次
TL1=0xec; //
if(pwm==1)
{
value_l+=3;
if(value_l > f_pwm_l) //高电平
{
value_l=0;
pwm=0;
}
}
else
{
value_l+=3;
if(value_l > 100 - f_pwm_l) //低电平
{
value_l=0;
pwm=1;
}
}
}