基于OpenCV的dnn模块使用ENet进行语义分割
1、说明:
测试的opencv版本为opencv3.4.5
电脑cup:Intel® Xeon(R) W-2125 CPU @ 4.00GHz × 8
2、下载ENet的配置文件:
见https://www.pyimagesearch.com/2018/09/03/semantic-segmentation-with-opencv-and-deep-learning/里面的下载链接
3、C++代码:
#include
#include
#include
void colorizeSegmentation(const cv::Mat &score, cv::Mat &segm, std::vector &colors) {
// score.size = 1 x 20 x 512 x 1024
const int chns = score.size[1];
const int rows = score.size[2];
const int cols = score.size[3];
cv::Mat maxCl = cv::Mat::zeros(rows, cols, CV_8UC1);
cv::Mat maxVal(rows, cols, CV_32FC1, score.data);
for (int ch = 1; ch < chns; ch++)
{
for (int row = 0; row < rows; row++)
{
const float *ptrScore = score.ptr(0, ch, row);
uint8_t *ptrMaxCl = maxCl.ptr(row);
float *ptrMaxVal = maxVal.ptr(row);
for (int col = 0; col < cols; col++)
{
if (ptrScore[col] > ptrMaxVal[col])
{
ptrMaxVal[col] = ptrScore[col];
ptrMaxCl[col] = (uchar)ch;
}
}
}
}
segm.create(rows, cols, CV_8UC3);
for (int row = 0; row < rows; row++) {
for (int col = 0; col < cols; col++) {
segm.at(row, col) = colors[maxCl.at(row, col)];
}
}
}
int main(int argc, char** argv) {
// load the class label names
std::vector classes;
std::string classesFile = "../enet-cityscapes/enet-classes.txt";
std::ifstream classNamesFile(classesFile.c_str());
if (classNamesFile.is_open()) {
std::string className = "";
while (std::getline(classNamesFile, className)) {
classes.push_back(className);
}
}
else {
std::cout << "can not open class label file" < colors;
std::string colorsFile = "../enet-cityscapes/enet-colors.txt";
std::ifstream colorNamesFile(colorsFile.c_str());
if (colorNamesFile.is_open()) {
std::string line;
while (std::getline(colorNamesFile, line)) { // 解析不够优雅
auto pos1 = line.find_first_of(',');
auto pos2 = line.find_last_of(',');
int b = std::stoi(line.substr(0, pos1));
int g = std::stoi(line.substr(pos1+1, pos2-pos1-1));
int r = std::stoi(line.substr(pos2+1, line.size()-pos2-1));
colors.push_back(cv::Vec3b(b, g, r));
}
} else { // otherwise, we need to randomly generate RGB colors for each class label
// initialize a list of colors to represent each class label in the mask
// (starting with 'black' for the background/unlabeled regions)
colors.push_back(cv::Vec3b());
for (int i = 1; i < classes.size(); ++i) {
cv::Vec3b color;
for (int j = 0; j < 3; ++j) {
color[j] = rand() % 256;
}
colors.push_back(color);
}
}
// initialize the legend visualization
cv::Mat legend(colors.size() * 25 + 25, 300, CV_8UC3);
// loop over the class names + colors
for (int i = 0; i < classes.size(); ++i) {
// draw the class name + color on the legend
cv::putText(legend, classes[i], cv::Point(5, (i * 25) + 17),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 255), 2);
cv::rectangle(legend, cv::Point(100, (i * 25)), cv::Point(300, (i * 25) + 25), colors[i], -1);
}
cv::imshow("legend", legend);
cv::waitKey(1);
// load our serialized model from disk
std::cout << "loading model..." << std::endl;
cv::dnn::Net net = cv::dnn::readNet("../enet-cityscapes/enet-model.net");
//net.setPreferableTarget(cv::dnn::DNN_TARGET_OPENCL);
cv::VideoCapture cap("../enet-cityscapes/toronto.mp4");
cv::Mat image;
while (cv::waitKey(1) != 27) // 'Esc'
{
// load the input image, resize it, and construct a blob from it,
// but keeping mind mind that the original input image dimensions
// ENet was trained on was 1024x512
cap >> image;
cv::Mat blob;
cv::dnn::blobFromImage(image, blob, 1/255.0, cv::Size(1024, 512), cv::Scalar(0, 0, 0), true, false);
// perform a forward pass using the segmentation model
net.setInput(blob);
cv::Mat output = net.forward();
cv::Mat mask;
colorizeSegmentation(output, mask, colors);
// resize the mask such that its dimensions match the original size of the input image
cv::resize(mask, mask, image.size(), 0, 0, cv::INTER_NEAREST);
// perform a weighted combination of the input image with the mask to form an output visualization
cv::addWeighted(image, 0.4, mask, 0.6, 0, output);
// Put efficiency information.
std::vector layersTimes;
double freq = cv::getTickFrequency() / 1000;
double t = net.getPerfProfile(layersTimes) / freq;
std::string label = cv::format("Inference time: %.2f ms", t);
cv::putText(output, label, cv::Point(0, 15), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 255, 0));
//show the input and output images
cv::imshow("Input", image);
cv::imshow("Output", output);
cv::waitKey(0);
}
cap.release();
return EXIT_SUCCESS;
}
4、解析:
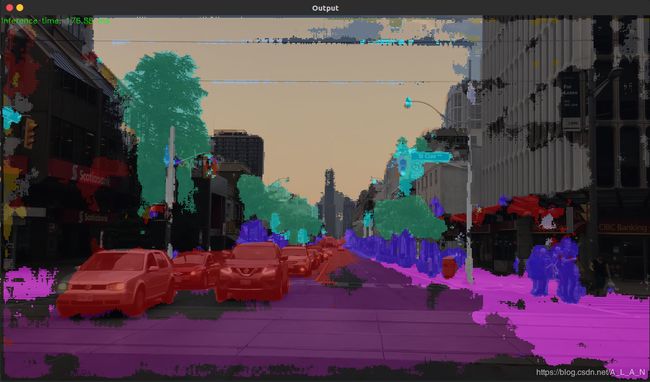
5、结果:

参考:
Semantic segmentation with OpenCV and deep learning
用OpenCv+ENet实现语义分割
[论文]ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation